| М
| 1.1
| 1,2
| 1,3
| 1,4
| 1.5
| 1,6
| 1,7
|
| s%
| 18,8
| 20,3
| 25,5
| 33,2
| 37,2
| 40,7
| 44,6
|
| wСtпп
| 7,75
| 6,3
| 5,85
| 5,5
| 5.45
|
| 7,25
|
| Dj(wС)
| 55°
| 50°
| 46°
| 42°
| 39°
| 36°
| 32°
|
Формирование желаемой ЛАЧХ по любой методике производится в три этапа: для низкого, среднего и высокочастотного диапазонов.
1. Методика В.А. Бесекерского [6] (первый тип задания).
Для построения низкочастотной части желаемой ЛАЧХ необходимо выбрать коэффициент усиления разомкнутой системы и первую постоянную времени Т1 так, чтобы вложиться в величину допустимой максимальной ошибки е max. Формулы для определения параметров низкочастотной части желаемой ЛАЧХ типовых позиционных следящих систем приведены в таблице 5.
Для того, чтобы система имела нужную точность, можно построить запретную зону, в которую не должна попадать желаемая ЛАЧХ. В соответствии с (22) на частоте воздействия(wk)  , так как для большинства практических случаев
, так как для большинства практических случаев  .
.
Таблица 5
Параметры низкочастотной части желаемой ЛАЧХ типовых позиционных следящих систем
| Вид входного
сигнала
| Тип системы
|
| Статическая
| Астатическая
1-го порядка
| Астатическая
2го порядка
|

| 
| 
|
-
|

|
-
| 
|
-
|

|
-
|
-
| 
|

| 

| 
| 
|
Таким образом на wk откладывают величину  и через полученную точку А проводят две прямые с наклоном -20 дБ/дек и -40 дБ/дек (рис. 15). Желаемая ЛАЧХ должна лежать не ниже полученной заштрихованной запретной области (обычно ее проводят на 3 дБ выше запретной зоны).
и через полученную точку А проводят две прямые с наклоном -20 дБ/дек и -40 дБ/дек (рис. 15). Желаемая ЛАЧХ должна лежать не ниже полученной заштрихованной запретной области (обычно ее проводят на 3 дБ выше запретной зоны).
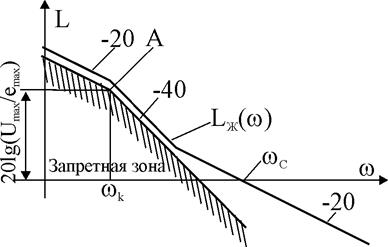
Рис. 15. Запретная зона для низкочастотной области ЛАЧХ
При построении среднечастотной части желаемой ЛАХ надо определить постоянную времени Т2 и сумму малых постоянных времени. Для их определения используют следующие формулы:
 ;
;  . (24)
. (24)
При использовании этого выражения следует учесть, что все малые постоянные времени могут быть сделаны, например, равными друг другу. Если
Т3 = Т4 = Т5, то сумма  . В этом случае желаемая ЛАЧХ после частоты
. В этом случае желаемая ЛАЧХ после частоты
среза переходит на сопряженной частоте 1/Т3 с наклона -20 дБ/дек сразу, например, на –80 дБ/дек,поэтому получим
 . (25)
. (25)
Очень важно, чтобы сумма малых постоянных времени выбранной желаемой ЛАЧХ не превосходила величины, полученной по формуле (24). Для всех желаемых ЛАЧХ, приведенных в таблице 2, показатель колебательности
 , где
, где  , (26)
, (26)
где А (w) – АЧХ замкнутой системы.
Связь между показателем колебательности М и другимикачественными показателями для типовых желаемых ЛАХ приведена в таблице 4.
Покажем на примере методику формирования желаемой ЛАЧХ по В. А. Бесекерскому.
Пример. Рассчитать и построить желаемую ЛАЧХ LЖ(w) для типовой следящей системы рис. 1 (или рис.6) в предположении, что слежение осуществляется за соотношением углов поворота приводов главного движения и подачи (на выходе тахогенераторов установлены интегрирующие звенья), на выходе которого установлен редуктор. В этом случае, как было показано ранее, система приобретает астатизм 1-го порядка. Известно, что передаточный коэффициент редуктора КП=1/ip=1/3500, КПутизна датчика КТГ=34,4 В/рад; постоянная времени тиристорного регулятора ТТР=0,0033с, электрическая постоянная времени двигателя ТЯ=0,02с, механическая постоянная времени двигателя ТД=0,1с, коэффициент передачи двигателя КД=5,7рад/(Вс) момент сопротивления нагрузки МС=35000Гсм, жесткость механической характеристики двигателя b= 0,16Гсмс/рад.
Пусть на входе системы необходимо обеспечить максимальную скорость слежения  =5град/с и максимальное ускорение
=5град/с и максимальное ускорение  =2град/с2 при следующих показателях качества процесса управления: максимальная допустимая ошибка е max<1' и максимальное значение перерегулирования s= 25%, в соответствии с таблицей 5 ему соответствует показатель колебательности М£1,3.
=2град/с2 при следующих показателях качества процесса управления: максимальная допустимая ошибка е max<1' и максимальное значение перерегулирования s= 25%, в соответствии с таблицей 5 ему соответствует показатель колебательности М£1,3.
В соответствии с первым этапом курсового проекта на основании анализа соотношения постоянных времени Ттр<<Тя<<Тд можно пренебречь постоянной времени тиристорного регулятора ввиду его малости. Тогда структурная схема следящей системы примет следующий вид.

Рис. 16. Структурная схема следящей системы
Передаточная функция разомкнутой системы
 .
.
Коэффициент усиления разомкнутой системы КП =140 с-1.
ЛАФЧХ разомкнутой системы имеют следующий вид (рис.17)






