Математическое отображение схемы резания.
При зубодолблении профильных моментопередающих соединений РК- и К- профиля основными движениями являются возвратно-поступательное движение резания и движение круговой подачи, которое является сложным и сводится к качению начального цилиндра инструмента по начальному цилиндру заготовки. Обработка профильных моментопередающих соединений РК- и К- профиля характеризуется взаимным обкатом точки режущих лезвий инструмента 2 (рисунок 2.3), которые перемещаются относительно обрабатываемой заготовки 1 по траекториям – гипоциклоидам (удлиненным и укороченным). Уравнения перемещения точек режущих лезвий долбяка и его центра относительно детали можно наиболее целесообразно представить в параметрической форме.
Для получения уравнения траектории перемещения точки при профилировании долбяка проецируем отрезок С0С1, являющийся межосевым расстоянием, на оси X и Y (рисунок 2.3):
 (2.7)
(2.7)
где  - угол, определяющий положение центра зубчатого колеса относительно долбяка;
- угол, определяющий положение центра зубчатого колеса относительно долбяка;
 - межосевое расстояние зубчатого колеса и долбяка;
- межосевое расстояние зубчатого колеса и долбяка;
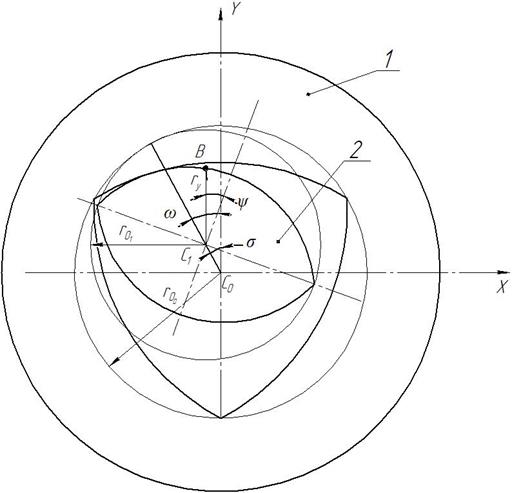
Рисунок 2.4. Определение положения зуба долбяка относительно впадины колеса с внутренними зубьями.
Взаимосвязь угла положения межосевого расстония  и угла положения профиля относительно межосевого расстояния- aw, выразится соотношением:
и угла положения профиля относительно межосевого расстояния- aw, выразится соотношением:
 (2.8)
(2.8)
где  и
и  - радиусы начальных описанных окружностей долбяка и РК- и К- профиля.
- радиусы начальных описанных окружностей долбяка и РК- и К- профиля.
Обозначим  через U0, подставим его в выражение (2.8), а затем (2.8) подставим в (2.3), получим:
через U0, подставим его в выражение (2.8), а затем (2.8) подставим в (2.3), получим:

Уравнение траектории перемещения любой точки внутреннего РК- и К- профиля относительно долбяка получим, проектируя отрезки С0С1 и С1B на координатные оси (рисунок 2.5):
 ;
;
 ;(2.9)
;(2.9)
 .
.
где  -межосевое расстояние долбяка и обрабатываемого колеса,
-межосевое расстояние долбяка и обрабатываемого колеса,
U0- отношение диаметра описанной окружности долбяка к диаметру описанной окружности профиля детали,
ω - угол, определяющий положение зуба долбяка относительно межосевого расстояния,
Δω - элементарный угол поворота за время двойного хода долбяка,
 (2.10)
(2.10)
 и
и  - радиус вектор точки профиля зуба долбяка и угол, определяющий его положение относительно линии симметрии зуба.
- радиус вектор точки профиля зуба долбяка и угол, определяющий его положение относительно линии симметрии зуба.
Параметры  и
и  определяются из выражений:
определяются из выражений:
 (2.11)
(2.11)
где xi и yi - координаты точки профиля зуба долбяка, полученные после профилирования.
В общем виде, для математического отображения схемы обработки внутренних моментопередающих профилей, формулы приобретают вид:
 ;
;
 ; (2.9)
; (2.9)
.
Для математического отображения схемы обработки внешних профилей профильных (рисунок 2.5) моментопередающих соединений произведем расчеты в такой же последовательности.
Для получения уравнения траектории перемещения точки при профилировании долбяка проецируем отрезок С0С1, являющийся межосевым расстоянием, на оси X и Y (рисунок 2.3):
(2.7)
где - угол, определяющий положение центра зубчатого колеса относительно долбяка;
- межосевое расстояние зубчатого колеса и долбяка;
Взаимосвязь угла положения межосевого расстояния и угла положения профиля относительно межосевого расстояния - ω, выразится соотношением:
 (2.8)
(2.8)
где  и
и  - радиусы описанных окружностей долбяка и внешнего РК- и К- профиля.
- радиусы описанных окружностей долбяка и внешнего РК- и К- профиля.

Рисунок 2.5. Определение положения зуба долбяка относительно впадины колеса с внутренними зубьями.
Обозначим  через U0, подставим его в выражение (2.8), а затем (2.8) подставим в (2.3), получим:
через U0, подставим его в выражение (2.8), а затем (2.8) подставим в (2.3), получим:
Уравнение траектории перемещения любой точки внешнего РК- и К- профиля относительно долбяка получим, проектируя отрезки С0С1 и С1B на координатные оси (рисунок 2.5):
 ;
;
 ; (2.9)
; (2.9)
.
Анализ полученного отображения схемы резания позволяет определять кинематические изменения заднего и переднего углов, угла наклона режущей кромки и толщину срезаемого слоя материала для любой точки профиля и в любой момент, что является основой прогнозирования составляющих силы резания, а впоследствии- износа инструмента, шероховатости поверхности зубчатого венца неэвольвентных колес с внутренними зубьями и точности их обработки.






