ТЕОРИЯ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
Лабораторный практикум
Йошкар-Ола
Марийский государственный технический университет
2011
УДК 621.181.7
ББК 31.37
Х56
Рецезенты:
кафедра электромеханики Марийского государственного университета(зав. кафедройпрофессор И.И.Попов);
профессор кафедры машиностроения и материаловедения
Марийского государственного технического университета С.Я.Алибеков
Печатается по решению
редакционно-издательского совета МарГТУ
Хлебников В.А., Бастракова С.В.
Х56 Теория автоматического управления: лабораторный практикум / В.А.Хлебников, С.В. Бастракова – Йошкар-Ола: Марийский государственный технический университет, 2011.- 74 с.
Приведены краткие теоретические сведения по разделу «Теория автоматического управления» курса «Управление, сертификация и инноватика», описания лабораторных работ и методики обработки результатов.
Для студентов специальности 140104.65 – «Промышленная теплоэнергетика», бакалавров и магистров направления 140104 – «Теплоэнергетика и теплотехника». Может быть использовано бакалаврами других направлений, изучающими курс «Автоматизация производственных процессов».
УДК 621.181.7
ББК 31.37
© Марийский государственный технический университет, 2011
ОГЛАВЛЕНИЕ
Предисловие………………..……………………………………….………………….…. 4
Введение…………………………………………………………………………………… 5
ОБЩИЕ МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО ВЫПОЛНЕНИЮ
ЛАБОРАТОРНЫХ РАБОТ……………………………………………………….…....….… 7
ТЕХНИЧЕСКИЕ СРЕДСТВА АВТОМАТИЗАЦИИ
В ТЕПЛОЭНЕРГЕТИКЕ…………………..……..……………………...…………………... 8
2.1. Основные понятия………………….………………………………………………… 9
2.2. Состав средств автоматизации АСУТП...………………………………………….. 12
2.3. Цифровая реализация типовых линейных алгоритмов регулирования…..………. 13
2.4. Электрические средства автоматического регулирования.………..………………. 15
2.5. Регулирующие органы и исполнительные устройства ….…………………………. 18
2.6. Методические указания по измерению температуры и расхода
воды с использованием управляющего контроллера.…………………………….…………. 20
Контрольные вопросы…………………………………………………………………….. 27
СТАТИЧЕСКИЕ И ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ТЕПЛОВОГО ОБЪЕКТА УПРАВЛЕНИЯ……..……………………...………………….. 28
3.1. Основные понятия………………….………………………………………………… 28
3.2. Порядок составления структурной схемы объекта..…………………………….…. 28
3.3. Статические характеристики объекта……………………………………….………. 31
3.4. Передаточные функции объекта…………………………………………………….. 32
3.5. Аналитическое и экспериментальное определение переходных
характеристик объекта…………..….…………………….……………………………………. 36
3.6. Аналитическое и экспериментальное определение импульсных
характеристик объекта..…………….…………………….……………………………………. 37
3.7. Аналитическое и экспериментальное определение частотных
характеристик…………………………………………………………………………………... 41
3.8. Описание имитационной модели теплового объекта……………………………… 43
3.9. Методические указания по выполнению заданий и требования
к содержанию отчета…………………..……………………………………………………….. 45
Контрольные вопросы…………………………………………………………………….. 55
ПРИНЦИП ДЕЙСТВИЯ РЕЛЕЙНО-ИМПУЛЬСНОГО
РЕГУЛЯТОРА……..……………………………………….……………...………………….. 56
4.1. Основные понятия………………….………………………………………………… 56
4.2. Кривая разгона П-регулятора……………………......………………………………. 58
4.3. Кривая разгона ПИ-регулятора………………...……………………………………. 59
4.4. Описание имитационной модели регулятора…..…………………..………………. 62
4.5. Методические указания по выполнению заданий и требования
к содержанию отчета…………………..……………………………………………………..… 63
Контрольные вопросы…………………………………………………………………….. 66
Заключение…………………………………………………………………………….…. 67
Библиографический список………………………………………………………….…. 68
Приложения
1. Численное вычисление интеграла свертки…………………..…………………...…… 69
2. Правила безопасности при работе в лабораториях кафедры
«энергообеспечение предприятий»……………………………..…………………..….… 72
ПРЕДИСЛОВИЕ
При выполнении лабораторного практикума по разделу «Теория автоматического управления», составленного в соответствии с требованиями Государственного образовательного стандарта, студенты изучают состав электрических средств автоматизации в промышленной теплоэнергетике, получают практические навыки по использованию методов экспериментального определения динамических и статических характеристик объектов и релейно-импульсного регулятора.
Инструментальной базой лабораторного практикума служат виртуальные средства автоматизации, реализованные с использованием графической среды программирования LabVIEW [2]. К таким средствам относятся виртуальные модели 3-х ёмкостного теплового объекта управления, релейно-импульсного П-, ПИ-регулятора, генератора синусоидальных колебаний, сервомотора исполнительного механизма прямоходного типа МЭП. Комплект программ для лабораторного практикума дополнен виртуальным цифровым ПИД-контроллером, широтно-импульсным модулятором (в дальнейшем - ШИМ), виртуальными приборами (в дальнейшем - ВП) для идентификации объекта, оптимизатором для определения оптимальных настроек регулятора и выполнения адаптации по переходной характеристике замкнутой системы, которые могут использоваться в процессе самостоятельной работы. Программное обеспечение является оригинальной разработкой авторов учебного пособия (свидетельство Роспатента о регистрации № 2011611231 от 25.02.2011 г.) [12].
Имитационная модель объекта управления позволяет в условиях лаборатории за короткое время исследовать характеристики, присущие реальным распределенным недетерминированным объектам. Возможно задание различных диапазонов расходов воды, диаметров трубопроводов и диафрагм, размеров ёмкостей. Ступенчатые возмущения могут наноситься при изменении расходов и давления воды, случайные неконтролируемые возмущения – изменением давления воды. Методика измерения расходов воды соответствует ГОСТ 8.586.1, ГОСТ 8.586.2, ГОСТ 8.586.3 [7,8,9].
Виртуальный релейно-импульсный ПИ-регулятор позволяет изучить принцип действия и реализацию П-, ПИ-законов регулирования на основе сервомотора постоянной скорости, получить переходные процессы регуляторов и исследовать влияние параметров обратной связи на переходные характеристики.
Совместное изучение взаимодействующих между собой объекта и контроллера позволяет привить студентам навыки системного подхода при исследовании систем автоматического управления (САУ) тепловыми процессами.
Описание каждой лабораторной работы содержит краткие теоретические сведения, цель и задачи исследования. Приводятся описания виртуальных моделей объекта и регулятора, методические рекомендации по выполнению заданий, вопросы для подготовки к защите и рекомендуемая литература.
Лабораторный практикум рассчитан на 17 часов аудиторных и 17 часов самостоятельной работы студентов.
ВВЕДЕНИЕ
Российская Федерация располагает значительными запасами энергетических ресурсов и мощным топливно-энергетическим комплексом.
В соответствии с «Энергетической стратегией России на период до
2030 года» в настоящее время Россия занимает лидирующие позиции по объему добычи сырой нефти и обеспечивает 12% ее мировой торговли. Свыше четырех пятых объема российской нефти экспортируется в страны Европы, доля России на рынках которых составляет около 30%. Россия занимает первое место в мире по запасам природного газа (23% мировых запасов) и по объемам его ежегодной добычи, обеспечивая 25% мировой торговли этим энергоносителем, доминируя как на европейском газовом рынке, так и на рынке стран Содружества Независимых Государств. Россия удерживает второе место в мире по запасам угля (19% мировых запасов), пятое место по объемам ежегодной добычи (5% мировой добычи) и обеспечивает около 12% мировой торговли энергетическим углем. Российская атомная энергетика составляет 5% мирового рынка атомной электрогенерации, 15% мирового рынка реакторостроения, 45% мирового рынка обогащения урана, 15% мирового рынка конверсии отработанного топлива и обеспечивает 8% мировой добычи природного урана.
Энергетической стратегией России на период до
2030 года предусмотрено существенное повышение эффективности потребления топлива и электрической энергии, опережающий рост производства электрической энергии на атомных электростанциях, более полное использование потенциала гидроэнергетики, расширение использования экономически эффективных возобновляемых источников энергии, обеспечение управления спросом на тепловую энергию силами и средствами потребителей (а не поставщиков тепла, как это до сих пор принято в России), для чего потребуется:
- создание автоматизированных систем управления спросом на электроэнергию;
- создание технологического оборудования и автоматизированных систем контроля и управления теплопотреблением;
- разработка и внедрение адаптивных схем и интеллектуальных систем регулирования, конструкций и оборудования для систем отопления и горячего водоснабжения;
- автоматизация и механизация мелких теплоисточников, оснащение их системами учета и регулирования отпуском тепловой энергии;
- в системах транспорта тепловой энергии автоматизированных узлов и систем управления режимами, а также организация оптимальных режимов функционирования тепловых сетей, теплоисточников и потребителей;
- в системах потребления тепловой энергии - учет количества и контроль качества потребляемой тепловой энергии, широкое внедрение тепловой автоматики, достижение высокой технологичности всего процесса теплопотребления, доступность его контроля и возможность управления [3].
Для разработки и эффективной эксплуатации систем автоматического регулирования и управления необходимо знать общие законы их построения и функционирования, методы их исследования и настройки. Эти вопросы изучает теория автоматического управления.
Тепловые объекты управления, описывающиеся дифференциальными уравнениями в частных производных, находящиеся под воздействием достаточно сильных случайных неконтролируемых возмущений, обладающие транспортными запаздываниями в передаче сигналов, требуют применения специальных методов анализа и синтеза систем автоматического управления. Поэтому сборник описаний лабораторных работ должен использоваться совместно с учебником [1]. Методика проведения занятий частично заимствована из сборника описаний лабораторных работ, разработанного на кафедре АСУТП МЭИ [4].
Широкое использование САУ в промышленной теплоэнергетике, на тепловых и атомных электрических станциях, требует, чтобы будущие инженеры-теплоэнергетики обладали глубокими знаниями в области теории автоматического управления, навыками исследования и настройки систем автоматического регулирования и управления.
ЛАБОРАТОРНЫХ РАБОТ
Порядок проведения лабораторных занятий на кафедре «Энергообеспечение предприятий» определяется утвержденными заведующим кафедрой общими методическими указаниями по лабораторным работам. Согласно этим указаниям студент обязан:
1. Приходить на лабораторные занятия полностью подготовленным к активному проведению работ. Для этого необходимо:
а) заранее ознакомиться с содержанием предстоящей лабораторной работы по учебному пособию и методическим указаниям, ответить на вопросы;
б) иметь при себе методические указания к лабораторной работе, USB-накопитель на флэш-памяти.
2. На первом занятии ознакомиться с правилами техники безопасности при выполнении работ в данной лаборатории и расписаться в соответствующем журнале.
3. Перед началом каждой новой работы представить преподавателю оформленный отчет по предыдущей работе (один на бригаду; требования к отчету приведены ниже).
Лабораторная работа начинается с проверки готовности студента к ее выполнению. Вопросы, на которые студент должен уметь отвечать в процессе проверки и весь теоретический и практический материал, необходимый для подготовки к лабораторной работе, приводится в учебном пособии и методических указаниях к работе.
В процессе выполнения лабораторной работы студентами оформляется отчет, который представляется преподавателю на следующем занятии. Порядок проведения защит лабораторных работ определяет преподаватель, ведущий занятия.
4. Отчет о проделанной работе должен быть предельно кратким. Вся информация, полученная в процессе эксперимента, должна быть обработана и представлена в сжатом, удобном для восприятия виде (графиками, рисунками, формулами).
Отчет должен содержать:
а) титульный лист,
б) цель, задание на работу с краткими рекомендациями по его выполнению,
в) рисунки, формулы и графики, иллюстрирующие процесс выполнения задания, а также окончательные результаты в числовом, графическом, формульном виде или в форме краткого вывода.
Текстовая часть отчета может выполняться на персональном компьютере с использованием текстового редактора Word. Выполнять расчеты и строить графики следует с помощью среды графического программирования Lab VIEW и электронных таблиц Excel.
Каждый рисунок должен иметь порядковый номер и подрисуночную надпись, однозначно определяющую его содержание. Необходимо расшифровать обозначения элементов схем. На графиках должны быть обозначены координатные оси, выполнена оцифровка осей, указаны размерности. Если на одном графике наносятся несколько кривых, то каждая из них должна быть обозначена цифрами 1, 2, 3 и т.д., а под рисунком даются краткие пояснения, однозначно определяющие отличия кривых друг от друга.
Рекомендуемый размер графиков 75х100 (100х150) мм (не более половины стандартного листа). Если из полученных графиков следует определить некоторые числовые значения, то последние должны быть приведены на полях рисунка.
Конец формы
2. ТЕХНИЧЕСКИЕ СРЕДСТВА АВТОМАТИЗАЦИИ
В ТЕПЛОЭНЕРГЕТИКЕ
ЛАБОРАТОРНАЯ РАБОТА № 1
(2 часа)
Цель работы: изучение состава, назначения и устройства электрических средств автоматизации. Дистанционное управление регулирующим органом и измерение температур и расхода горячей воды с использованием микропроцессорного управляющего контроллера.
Основные понятия
Регулирование технологическим (в т.ч. теплотехническим) объектом представляет собой непрерывный процесс выработки команд, обеспечивающих изменение состояния этого объекта при соблюдении заданных требований и ограничений.
Под теплотехническим объектом регулирования понимается совокупность теплоэнергетического оборудования и реализуемых в нем технологических процессов производства тепловой энергии.
Регулирование, осуществляемое без участия человека, называется автоматическим. При ручном регулировании оператор с помощью органов управления воздействует на объект регулирования. Автоматизированное управление сочетает высокий уровень автоматизации с участием человека при решении задач, не поддающихся формализации.
Техническое устройство, реализующее регулирование, называется автоматическим регулирующим устройством (регулятором, контроллером). Объект регулирования и контроллер, взаимодействующие друг с другом, образуют автоматическую систему регулирования (АСР).
Состояние объекта определяется его регулируемыми величинами. Воздействия, получаемые объектом в процессе его функционирования и приводящие к нежелательным отклонениям регулируемых величин, называются возмущениями. Изменение регулируемых величин в соответствии с целью управления осуществляется подачей на объект специальных регулирующих воздействий. Для их осуществления на объекте устанавливаются регулирующие органы и исполнительные механизмы.
Схематическое изображение элементов АСР представлено на рис. 1. Регулятор, получая сигнал задания x ( t ), формирует регулирующее воздействие на объект µ( t ) таким образом, чтобы регулируемая величина y ( t ) соответствовала заданию, т.е. чтобы достигалась цель управления

Структурная схема АСР показана на рис. 2.На ней упрощенно (прямоугольниками) изображаются объект, регулятор (в общем случае являющийся частью контроллера). Измерительный блок, алгебраически суммирующий сигналы, показывается кружочком с крестиком внутри. Все входные величины и возмущения изображаются стрелками, направленными на прямоугольники, выходные - стрелками от прямоугольников. Ошибка регулирования

АСР теплотехническим объектом является одним из элементов автоматизированной системы управления тепловыми процессами (АСУТП). В таких системах вычислительный комплекс (ВК) осуществляет измерение и контроль параметров технологического процесса, вычисление комплексных технических и технико-экономических показателей, вырабатывает задания регуляторам АСР. Структура АСУТП с ВК показана на рис. 3.

Рис. 1. Схематическое изображение элементов АСР
РО – регулирующий орган; Д – датчик; ИБ – измерительный блок; ФБ – блок, формирующий управляющее воздействие µ(t); ПРР – переключатель режима работы («автоматический/ручной»); БУ – блок ручного управления («Б» - кнопка для перемещения ИМ в сторону «Больше», «М» - в сторону «Меньше»); У – усилитель мощности управляющего
воздействия; ИМ – исполнительный механизм;
y(t) – регулируемая величина; x(t) – сигнал задания; ε(t) – ошибка регулирования;
µ(t) – регулирующее воздействие; λ(t) – возмущающие воздействия
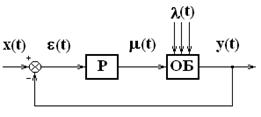
Рис. 2. Структурная схема одноконтурной АСР
Р – регулятор; ОБ – объект регулирования

Рис. 3. Структура АСУТП с супервизорным и непосредственным цифровым управлением
АСР – автоматическая система регулирования; АСУ – автоматизированная система управления; ВК – вычислительный комплекс; ОУ – объект управления
Регулирования
В настоящее время подавляющее большинство АСР непрерывными теплотехническими объектами строится на технической базе микропроцессорных управляющих контроллеров. Формирование регулирующих воздействий в таких системах осуществляется цифровыми вычислительными устройствами (ВУ), которые оперируют не с непрерывными сигналами, а с дискретными числовыми последовательностями. Перед поступлением в ВУ непрерывные сигналы квантуются по времени и по уровню [1]. Структурная схема АСР непрерывным объектом с цифровым регулятором приведена на рис. 4.
Рис. 4. АСР с цифровым регулятором
АЦП – аналого-цифровой преобразователь; ВУ – вычислительное устройство;
ЦАП - цифро-аналоговый преобразователь
В непрерывных и цифровых АСР теплотехническими объектами применяются типовые законы регулирования (линейные алгоритмы) с пропорциональным (П), пропорционально-интегральным (ПИ), пропорционально-интегрально-дифференциальным (ПИД) преобразованием ошибки регулирования ε( t ) в регулирующее воздействие µ( t ).
В случае непрерывной АСР (рис.2) регулятор описывается следующими формулами:
П-алгоритм

ПИ-алгоритм
ПИД-алгоритм

где  – коэффициент передачи регулятора;
– коэффициент передачи регулятора;  – постоянная времени интегрирования;
– постоянная времени интегрирования;  – постоянная времени дифференцирования.
– постоянная времени дифференцирования.
Передаточные функции типовых непрерывных регуляторов:
П-регулятор

ПИ-регулятор
ПИД-регулятор
В случае цифровой АСР (рис. 4) вычислительное устройство ВУ описывается разностными уравнениями, имеющими для типовых алгоритмов вид:
П-алгоритм

ПИ-алгоритм

ПИД-алгоритм

где Т – период квантования сигналов по времени (период дискретизации ВУ).
Передаточные функции типовых дискретных регуляторов:
П-регулятор

ПИ-регулятор
ПИД-регулятор

где 
Отопительный прибор
| Наименование
параметра
| Обозн.
| Ед.
Измер.
| Степень открытия РО, %
| |
| 5
| 10
| 15
| 30
| 100
| |
| Температура воды на входе в радиатор
| tи'
| °С
|
|
|
|
|
| |
| Абс. погрешность ТСП
| ±Δt
| °С
|
|
|
|
|
| |
| Абс. погрешность
cFP-RTD-122
| ±ΔR
| °С
| 0,016
| |
| Абс. погрешность
cFP-2020
| ±ΔN
| °С
| 0
| |
| Абс. погрешность
измер. температуры
| ±Δtи'
| °С
|
|
|
|
|
|
| Температура воды на выходе из радиатора
| tи"
| °С
|
|
|
|
|
|
| Абс. погрешность ТСП
| ±Δt
| °С
|
|
|
|
|
|
| Абс. погрешность
cFP-RTD-122
| ±ΔR
| °С
| 0,016
|
| Абс. погрешность
cFP-2020
| ±ΔN
| °С
| 0
|
| Абс. погрешность
измер. температуры
| ±Δtи"
| °С
|
|
|
|
|
|
| Расход воды на входе в радиатор
| Gи
| м3/ч
|
|
|
|
|
|
| Диаметр условного
прохода
| DУ
| мм
| 20
|
| Ср. скорость потока
| v
| м/с
|
|
|
|
|
|
| Предел доп. отн. погр. ЭРСВ-410
| ±δр
| %
|
|
|
|
|
|
| Предел доп. отн. погр. cFP-AI-112
| ±ΔU
| %
| 0,03
|
| Предел доп. отн. погр. cFP-2020
| ±ΔN
| %
| 0
|
| Предел доп. отн. погр. расхода
| ±δ
| %
|
|
|
|
|
|
| Абс. погрешность
измерения расхода
| ±ΔGи
| м3/ч
|
|
|
|
|
|
Контрольные вопросы
1.Что представляет собой управление теплотехническим объектом?
2.Что понимается под теплотехническим объектом управления?
3.Какое управление называется автоматическим, ручным, автоматизированным?
4.Что называется автоматическим управляющим устройством (контроллером)?
5.Приведите примеры управляемых величин, управляющих воздействий и возмущений для парового котла.
6.Поясните назначение основных элементов одноконтурной АСР.
7.Поясните структуру и функции АСУТП с вычислительным комплексом.
8.Приведите классификацию средств автоматизации АСУТП по функциональному признаку.
9.Назовите основные измерительные преобразователи, применяемые в промышленной теплоэнергетике.
10.Где обычно устанавливаются операторские станции?
11.Как преобразуются непрерывные сигналы перед поступлением в ВУ цифровой АСР?
12.Какие регуляторы применяются в системах автоматизации теплотехнических объектов?
13.Какие микропроцессорные контроллеры применяются в системах автоматизации теплотехнических объектов?
14.Какие комплексы технических средств применяются в системах автоматизации теплотехнических объектов?
15.Какими способами реализуются регулирующие воздействия на теплотехнический объект?
16.Что используется для практического осуществления регулирующих воздействий на теплотехнический объект?
17.Какими способами возможно изменять расходы газообразной и жидкой сред?
18.Назовите конструктивные схемы дроссельных регулирующих органов, применяемых в промышленной теплоэнергетике.
19.Какие элементы входят в состав электрических ИМ?
20.С какими устройствами совместно работают ИМ?
21.Какие виды электрических ИМ постоянной скорости выпускаются отечественной промышленностью?
22.Назовите основные технические характеристики электрических ИМ.
3. СТАТИЧЕСКИЕ И ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ТЕПЛОВОГО ОБЪЕКТА
ЛАБОРАТОРНАЯ РАБОТА № 2
(10 часов)
Цель работы: составление структурной схемы 3-х ёмкостного объекта регулирования уровня воды, определение статических характеристик объекта, аналитический расчет и экспериментальное определение переходных, импульсных и частотных характеристик объекта.
Основные понятия
Математические модели объекта регулирования (например, уровня воды в барабане парового котла) и автоматического управляющего устройства (контроллера) в общем случае описываются нелинейными дифференциальными уравнениями.
Среди всего многообразия видов дифференциальных уравнений общие методы решения имеют лишь линейные дифференциальные уравнения. Поэтому при построении математических моделей АСР стремятся использовать всегда, когда это возможно, линейные математические модели на основе линейных дифференциальных уравнений
Изучение объекта начинается с составления его структурной схемы.
Переходных характеристик
По передаточным характеристикам объекта можно рассчитать динамические характеристики по регулирующему и возмущающему каналам. Так, например, передаточная функция канала "регулирующий орган - уровень во 2-й ёмкости" имеет вид

откуда

По дифференциальному уравнению объекта нетрудно рассчитать его переходную характеристику[4]. Для первой ёмкости она имеет вид
 (3.8)
(3.8)
для 1-й и 2-й последовательно включенных ёмкостей (если Т1 ≠ Т2)
 (3.9)
(3.9)
где


Переходные характеристики могут быть определены экспериментальным путём. Для этого при установившемся состоянии объекта необходимо нанести ступенчатое возмущение по исследуемому каналу и записать реакцию объекта. Затем из каждой ординаты кривой разгона вычесть (по абсолютной величине) ординату установившегося состояния, предшествовавшего нанесению возмущения, а результат поделить на величину возмущения (рис. 17). Следует иметь в виду, что при больших возмущениях линейная модель хуже соответствует реальному объекту.
Частотных характеристик
Комплексной частотной характеристикой (КЧХ) называется комплексная функция частоты, получаемая из передаточной функциисистемы (объекта) W ( s ) после замены s на jω . Рассчитывается по формулам
 (3.12)
(3.12)
где А(ω) и φ(ω) – модуль и аргумент КЧХ. Они связаны с вещественной Р(ω) и мнимой Q (ω) характеристиками соотношениями
 (3.13)
(3.13)
 (3.14)
(3.14)
|W ( jω )|= A ( ω ) – называется амплитудно-частотной характеристикой (АЧХ), arg { W ( jω )}= φ ( ω ) – фазо-частотной характеристикой (ФЧХ).
Для экспериментального определения КЧХ на вход системы (объекта) следует подать синусоидальное воздействие
 (3.15)
(3.15)
Спустя некоторое время на выходе установятся синусоидальные колебания той же частоты, но с другой амплитудой и сдвинутые относительно входа на время Δ t или по фазе на φ(ω) (см. рис. 20)
 (3.16)
(3.16)
 (3.17)
(3.17)
Отношение амплитуд установившихся колебаний выхода и входа
 (3.18)
(3.18)
определяет для частоты ω одну точку АЧХ, а сдвиг по фазе выходных колебаний относительно входных - одну точку ФЧХ. Повторив эксперимент для других частот, можно построить графики АЧХ, ФЧХ, КЧХ.
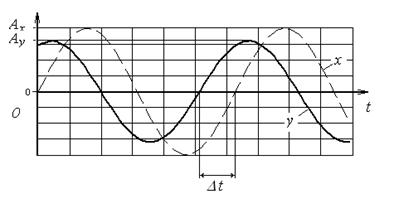
Рис. 20. Графики входного и выходного синусоидального колебаний
КЧХ представляет собой изображение по Фурье импульсной переходной характеристики
 (3.19)
(3.19)
Для численного вычисления КЧХ по формуле (3.19) может использоваться функция Real FFT (Real Fast Fourier Transform) (действительное быстрое прямое преобразование Фурье) [6]. Для этого на вход Х иконки этой функции необходимо подать действительный массив импульсной переходной характеристики, на вход Shift – логическое значение, определяющее необходимость сдвига постоянной составляющей в центр выходной последовательности (рекомендуется использовать значение false , т.е. без сдвига). На вход FFT Size подается длина выполняемого преобразования Фурье. Рекомендуется этот параметр задавать равным числу элементов массива Х. На выходе иконки – комплексный массив значений КЧХ и наличие ошибки в произведенных вычислениях. Элемент с номером 1 соответствует искомой первой гармонике комплексного спектра. Значения амплитудной и фазовой частотной характеристик определяется по формулам


где d – амплитуда входных колебаний прямоугольной формы, a 1 и b 1 – действительная и мнимая части первой гармоники комплексного спектра выходных колебаний.
Используя формулу обратного преобразования Фурье, по заданной КЧХ можно вычислить импульсную переходную характеристику
 (3.20)
(3.20)
Численное вычисление по формуле (3.20) может быть выполнено с использованием функции Invers FFT (Invers Fast Fourier Transform) (действительное быстрое обратное преобразование Фурье) [6].
К содержанию отчета
Задание 1. Составить структурную схему объекта
В отчете по этому заданию необходимо проанализировать взаимодействие основных элементов и начертить структурную схему регулируемого объекта для 3-х ёмкостей. Структурная схема объекта, состоя-
Таблица 3
Определение кривых разгона
| t,
c
| Δµ,
%
| Н1, мм
| Н2, мм
| Н3, мм
| h1эксп(t)
| h1теор(t)
| h2эксп(t)
| h2теор(t)
| h3эксп(t)
|
| 0
|
|
|
|
|
|
|
|
|
|
| 1
|
|
|
|
|
|
|
|
|
|
| 2
|
|
|
|
|
|
|
|
|
|
| …
|
|
|
|
|
|
|
|
|
|
| n
|
|
|
|
|
|
|
|
|
|
Таблица 5
РЕГУЛЯТОРА
ЛАБОРАТОРНАЯ РАБОТА № 3
(5 час)
Цель работы: изучение принципа действия релейно-импульсного регулятора, экспериментальное получение и анализ переходных характеристик П- и ПИ-регуляторов, аппроксимация переходных характеристик релейно-импульсного ПИ-регулятора графиками переходных характеристик идеального ПИ-регулятора и оценка по ним коэффициента усиления Кр и постоянной интегрирования Ти.
Основные понятия
В энергетике, металлургии и др. отраслях промышленности получили широкое распространение АСР с аналоговыми релейно-импульсными регуляторами и электроприводами с постоянной скоростью вращения. На структурной схеме (рис. 2) такой регулятор обозначен буквой Р.
В релейно-импульсных регуляторах формирование требуемого закона регулирования осуществляется с помощью специальных корректирующих динамических звеньев. Они выполняются в виде отрицательных обратных связей, охватывающих усилители, расположенные в цепи прохождения сигнала к ИМ (рис. 21).
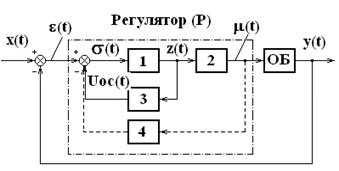
Рис.21. Структурная схема релейно-импульсного регулятора
1 - релейный усилитель; 2 – интегрирующий ИМ (сервомотор); 3, 4 – обратные связи
Релейно-импульсный регулятор состоит из сумматора входного сигнала ε( t ) и сигналов обратной связи Uoc ( t ), релейного усилителя с зонами нечувствительности и возврата (1), интегрирующего ИМ (сервомотора), служащего для перемещения РО (2), и отрицательной обратной связи для формирования требуемого закона регулирования
(3 или 4).
Релейный усилитель совместно с звеном обратной связи формирует пусковые импульсы для включения ИМ. Он имеет характеристику 3-х позиционного реле с зонами нечувствительности и возврата (рис. 22).






