Виртуальный релейно-импульсный регулятор (ВП) располагается на левой панели (рис. 24). Входной сигнал (ошибка регулирования) подаётся потенциометром U вх. Возможно изменение следующих параметров релейного усилителя, ИМ и обратных связей с помощью потенциометров, имеющих следующие обозначения:
Δ – зона нечувствительности,
Δв/Δ – отношение зоны возврата к зоне нечувствительности,
S – скорость ИМ,
K ’ oc – коэффициент передачи обратной связи 4 (на рис.21),
K ” oc – коэффициент передачи инерционной обратной связи 3
(на рис.21),
Toc – постоянная времени инерционной обратной связи 3.
На правой панели размещены графические индикаторы для регистрации процессов, протекающих в различных элементах регулятора.
При использовании виртуального релейно-импульсного регулятора предполагается, что электропитание на лабораторную установку подаётся автоматически с запуском ВП в работу. Графики изображаются с момента подачи входного сигнала.
4.5. Методические указания по выполнению заданий и требования
К содержанию отчета
Задание 1. Реализация П-регулятора на основе сервомотора постоянной скорости
1.Включить ВП в работу при выключенных тумблерах 1 - 4.
2.Установить положения ручек Δ, Δв/Δ, S и величину входного сигнала U 0 согласно табл. 6.
3.Включить обратную связь 4 (рис. 24). Тумблером 1 подать ступенчатый входной сигнал.
4.Сохранить моментальную фотографию графиков в файле.
Повторить п.п. 1-4 для других вариантов исходных данных. Выключить ВП.
Для каждого опыта вычисляются: скорость сервомотора S (по участку включения сервомотора), коэффициенты обратной связи K ’ oc и передачи регулятора K р (по установившимся значениям сигналов на выходе сервомотора и жёсткой обратной связи).
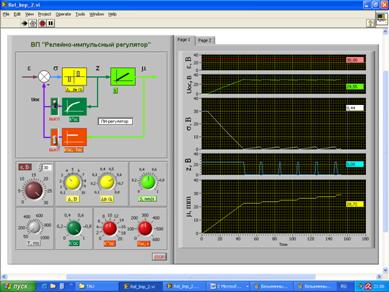
Рис. 24. Имитационная модель релейно-импульсного регулятора
В отчете по заданию 1 приводятся:
1) структурная схема П-регулятора;
2) графики переходных функций
 ,
,
переходная функция идеального П-регулятора с коэффициентом
усиления

(все на одном графике, в одном масштабе);
3) зависимость K р от величины входного сигнала и вывод о близости исследуемого П-регулятора к идеальному;
4) вывод о влиянии K ’ oc и S на переходную функцию П-регулятора.
Таблица 6
Анализ влияния входного сигнала и характеристик элементов
П-регулятора на величину коэффициента усиления
| № п/п
| U0,
В
| Δ,
В
|
Δв
— Δ
| S ,
мм/с
| K ’ oc
|
Δµ
S = —,
Δ t
|
Δ Uoc
K ’ oc =——
Δµ
Δµ
| Δµуст
Kp= ——
U0
|
| 1
| 10
| 3,5
| 0,6
| 0,5
| 1
|
|
|
|
| 2
| 20
| 3,5
| 0,6
| 0,5
| 1
|
|
|
|
| 3
| 30
| 3,5
| 0,6
| 0,5
| 1
|
|
|
|
| 4
| 30
| 3,5
| 0,6
| 1
| 2
|
|
|
|
| 5
| 30
| 3,5
| 0,6
| 0,5
| 1
|
|
|
|
Задание 2. Реализация ПИ-регулятора на основе сервомотора постоянной скорости
1.Включить ВП в работу при выключенных тумблерах 1 - 4.
2.Установить положения ручек Δ, Δв/Δ, S и величину входного сигнала U 0 согласно табл. 7.
3.Включить обратную связь 3 (рис. 24). Тумблером 1 подать ступенчатый входной сигнал.
4.Сохранить моментальную фотографию графиков в файле.
Повторить п.п. 1-4 для других вариантов исходных данных. Выключить ВП.
По записям кривых разгона звена обратной связи определить для каждого опыта значения параметров K ” oc и Toc . Используя формулы (4.11), (4.12) определить Кр и Ти.
В отчете по заданию 2 приводятся:
1) структурная схема ПИ-регулятора;
2) графики кривых разгона реального и идеального ПИ-регулятора
(все на одном графике, в одном масштабе);
3) зависимости K р = f ( U 0 ) и Ти= F ( U 0 ), полученные в результате аппроксимации, и теоретические значения K р * и Ти*, полученные по формулам (4.8);
4) графики Ти= f ( Toc ), Kp / T и = F (1/ K ” oc );
5) оценки относительных расхождений δк и δт между расчётными и экспериментальными значениями параметров настройки.
Таблица 7





