3.1 Назначение и принцип работы наземной навигационной
аппаратуры
Современные боевые действия характеризуются широким маневром войск по фронту и в глубину. Войска совершают передвижения преимущественно ночью, в условиях ограниченной видимости и, как правило, по незнакомой местности. Обычные способы ориентирования на местности в бою или при преследовании противника в условиях ограниченной видимости, на местности со слаборазвитой дорожной сетью и бедной ориентирами часто вызывают затруднения, а иногда приводят к потере ориентации и срыву выполнения боевых задач.
Быстрое и надежное ориентирование войск на незнакомой местности обеспечивают средства наземной навигации, которыми оснащаются современные боевые и специальные машины. Кроме того, навигационная аппаратура является одним из важных средств автоматизации управления войсками.
Под наземной навигацией понимается теория и практика определения координат объектов, движущихся на поверхности Земли.
Принцип работы наземной навигационной аппаратуры (ННА) заключается в непрерывном вычислении приращений координат и суммировании их с координатами предыдущей точки. Для этого на подвижном объекте устанавливают специальные технические устройства (координаторы, курсопрокладчики), позволяющие непрерывно измерять пройденное расстояние от начальной точки маршрута и дирекционный угол продольной оси машины.
Наземная навигационная аппаратура применяется, главным образом, при действиях подразделений в бою и совершении марша на местности бедной ориентирами, в условиях ограниченной видимости и ночью. Используя информацию о скорости или пути движения объекта относительно земной поверхности и о дирекционном угле продольной оси объекта, ННА вырабатывает информацию в целях обеспечения ориентирования и определения местоположения объекта на местности.
Кроме ориентирования, навигационная аппаратура в комплексе с имеющимися в машине угломерными устройствами и дальномерами позволяет осуществлять топогеодезическую привязку элементов боевого порядка, определять координаты целей, наносить на карту не обозначенные на ней дороги, колонные пути, границы районов разрушений, завалов, затоплений и пожаров, участков радиоактивного и химического заражения и т. п.
Приборы наземной навигации по назначению и устройству подразделяют на три типа: гирополукомпасы, координаторы и курсопрокладчики. Название типа наземной навигационной аппаратуры происходит от имеющегося в ней счетно-решающего устройства. Гирополукомпас такого устройства не имеет.
Гирополукомпас входит в состав любой ННА и предназначен для выдерживания заданного направления движения (курса) машины в любых условиях видимости. Он монтируется на танках, боевых машинах, разведывательных машинах, командно-штабных машинах, а также на некоторых видах плавающих средств. Ориентирование по гирополукомпасу в значительной мере аналогично движению по азимуту. Среднее отклонение от маршрута при выдерживании направления при помощи гирополукомпаса составляет около 5 % пройденного пути.
Навигационная аппаратура с координатором предназначена для непрерывной автоматической регистрации в пути прямоугольных координат местоположения и курса движущейся боевой машины, направления на конечный пункт маршрута и расстояния до него. Она может быть также использована для целеуказания и нанесения на карту колонных путей, районов затопления, границ зараженных участков и других объектов. Координатор является одним из основных приборов танковой навигационной аппаратуры (ТНА) различных модификаций.
Навигационная аппаратура с курсопрокладчиком предназначена для непрерывной автоматической регистрации прямоугольных координат местоположения, курса движущейся машины и вычерчивания на топографической карте пройденного машиной пути.
Курсопрокладчики входят в состав аппаратуры, устанавливаемой на боевых разведывательных и специальных машинах.
В топогеодезических подразделениях ракетных войск и артиллерии и в некоторых других подразделениях применяются специальные машины – топопривязчики, предназначенные для топогеодезической привязки стартовых позиций ракет, огневых позиций артиллерии, антенн радиолокационных станций, стоянок самолетов, оснащенных прицельно-навигационными комплексами. Топопривязчики могут использоваться для вождения колонн войск ночью и в других условиях трудных для ориентирования, а также для обозначения на карте не обозначенных на ней дорог, зон заражения (затопления) и границ различных объектов.
В основе работы навигационных приборов использовано свойство сохранять неизменным направление оси вращения в пространстве быстровращающегося тела, масса которого равномерно распределена относительно оси вращения. Этим свойством обладает гироскоп (рисунок 3.1) – один из важнейших узлов навигационной аппаратуры. Простейшим примером гироскопа является волчок. При быстром вращении его ось остается неподвижной.
Гироскоп используется для автономного определения азимутов направлений, он является основным элементом систем автоматического управления самолетами, ракетами, кораблями. Преимущество гироскопа по сравнению с компасом заключается в том, что он не подвержен влиянию магнитного поля Земли, устойчиво работает в боевых машинах, в районах магнитных аномалий и бурь.
Гироскоп состоит из ротора и карданного подвеса. При работе гироскопа его ротор с большой скоростью вращается вокруг трех осей (X, Y, Z).
Ось X называется главной осью гироскопа, ось Y – осью чувствительности, ось Z – осью прецессии гироскопа. Система двух подвижных рамок (1, 2) и закрепленной в них оси вращения ротора образуют карданный подвес. Неподвижная точка О называется точкой подвеса (рисунок 3.1).

1 – ротор; 2 – внутренняя рамка; 3 – наружная рамка; 4 – основание
Рисунок 3.1 – Гироскоп с тремя степенями свободы
В современных гироскопах используется, как правило, ротор электрического двигателя – гиромотора.
Вследствие вращения Земли и трения в подшипниках с течением времени главная ось гироскопа постепенно отклоняется от своего первоначального положения как по азимуту, так и в плоскости горизонта. Для исключения отклонения главной оси, в приборах ННА имеются специальные корректирующие устройства: азимутальное – для устранения ухода главной оси гироскопа по азимуту и горизонтирующее – для удержания ее в плоскости горизонта. С помощью этих устройств производится балансировка курсовой системы, то есть регулирование курсовой системы компенсацией постоянной составляющей скорости ухода гирокурсоуказателя.

Рисунок 3.2 – Положение главной оси гироскопа при повороте машины
Гироскоп имеет два важных свойства.
Свойство стабилизации – ось ротора гироскопа сохраняет неизменным в мировом пространстве заданное направление до тех пор, пока на гироскоп не действуют внешние силы.
Свойство прецессии – под действием внешних сил ось ротора гироскопа отклоняется от своего первоначального положения в направлении, перпендикулярном к вектору приложенного момента сил.
Свойства гироскопа проявляются тем лучше, чем больше его масса и скорость вращения ротора. Ось вращения в таком случае более устойчиво сохраняет заданное направление в пространстве. Поэтому при изготовлении гироскопов стремятся обеспечить наибольшее число оборотов ротора в единицу времени.
Оба свойства гироскопа используются в конструкциях измерителей курса движения боевых машин. Если гироскоп установить в машине (танке), то при любом ее повороте ось вращающегося ротора всегда будет показывать определенное, заранее установленное направление. Относительно этого направления можно следить за углом поворота машины и постоянно знать дирекционный угол направления движения машины (рисунок 3.2). А если известен дирекционный угол направления движения машины и пройденное расстояние, то можно вычислить координаты точки относительно начальной.
Гирополукомпас
3.2.1 Основные составляющие гирополукомпаса и их назначение
Гирополукомпас состоит из гиромотора в карданном подвесе, корректирующих устройств и арретира, помещенных в металлический корпус (рису-
нок 3.3). Основной элемент гирополукомпаса – гироскоп, главная ось которого вместе с курсовой шкалой сохраняют неизменное направление относительно сторон горизонта. Указатель отсчета по курсовой шкале жестко связан с машиной. Курсовая шкала гирополукомпаса проградуирована в делениях угломера. Одно деление шкалы равно 0-20 (около 1°).
Направление движения по гирополукомпасу выдерживают путем наблюдения за положением шкалы относительно индекса. При движении машины по прямолинейному участку маршрута положение главной оси гироскопа и указателя отсчета на курсовой шкале не изменяются. На повороте вместе с машиной поворачивается корпус гирополукомпаса с указателем отсчета.

1 – корпус; 2 – лампочка подсветки; 3 – указатель отсчета; 4 – курсовая шкала;
5 – пробка; 6 – отвертка; 7 – рукоятка арретира
Рисунок 3.3 – Гирополукомпас
Например, текущий отсчет шкалы гироскопа равен 6-20, после поворота машины отсчет соответствует 2-20, следовательно, машина совершила поворот влево на угол 4-00.
Корректирующее устройство гирополукомпаса предназначено для учета суточного вращения Земли. Величина коррекции зависит от географической широты местоположения машины. Балансировка гироскопа осуществляется при перемене района действий более чем на 4° по широте. Широта вводится с помощью отвертки 6, которая вывертывается из панели и при нулевом курсе вставляется в гнездо, закрытое пробкой 5.
Арретир предназначен для закрепления внутренней и наружной рамок гироскопа в нерабочем положении и служит для установки на курсовой шкале нужного отсчета.
Разновидностью гирополукомпаса является гироскопический курсоуказатель (гирокурсоуказатель), предназначенный для преобразования изменений дирекционного угла направления движения машины в электрические сигналы.
Вождение машины по гирополукомпасу чаще всего осуществляют при преодолении рек под водой, в условиях ограниченной видимости, при выдерживании маршрута на местности, бедной ориентирами и в других случаях, когда ориентирование по карте путем ее визуального сличения с местностью затруднено.
Включение (выключение) навигационной аппаратуры производится только в неподвижной машине. После разарретирования гирополукомпаса, если позволяет обстановка, начинать движение следует спустя 10-20 мин.
3.2.2 Ориентирование по гирополукомпасу
Ориентирование по гирополукомпасу включает подготовку исходных данных для движения, начальное ориентирование машины, подготовку аппаратуры к работе и непосредственное выдерживание направления движения.
Исходными данными служат дирекционные углы или магнитные азимуты направлений между точками поворота на маршруте и расстояния между ними, которые определяются по топографической карте. В качестве исходных пунктов выбираются пункты ГГС, четкие контурные точки на местности (центры перекрестков постоянных дорог, мосты и т. п.).
Маршрут движения намечается на карте по проходимой местности с использованием ее маскировочных и защитных свойств. Выбранные исходные точки и точки (ориентиры) на поворотах маршрута должны позволять наезд на точку или подъезд вплотную. С этих точек должна быть видимость на какой-либо ориентир. Выбранные точки (ориентиры) на поворотах маршрута обозначаются кружками. Расстояния между точками поворота при движении днем выбирают через 6-10 км и через 3-5 км – ночью.
При отсутствии топографической карты составляют схему маршрута, на которую, кроме исходных данных (дирекционных углов и расстояний), наносят промежуточные ориентиры, а также показывают возможные препятствия для движения. Вариант оформления маршрута на карте для движения по гирополукомпасу показан на рисунке 3.4.
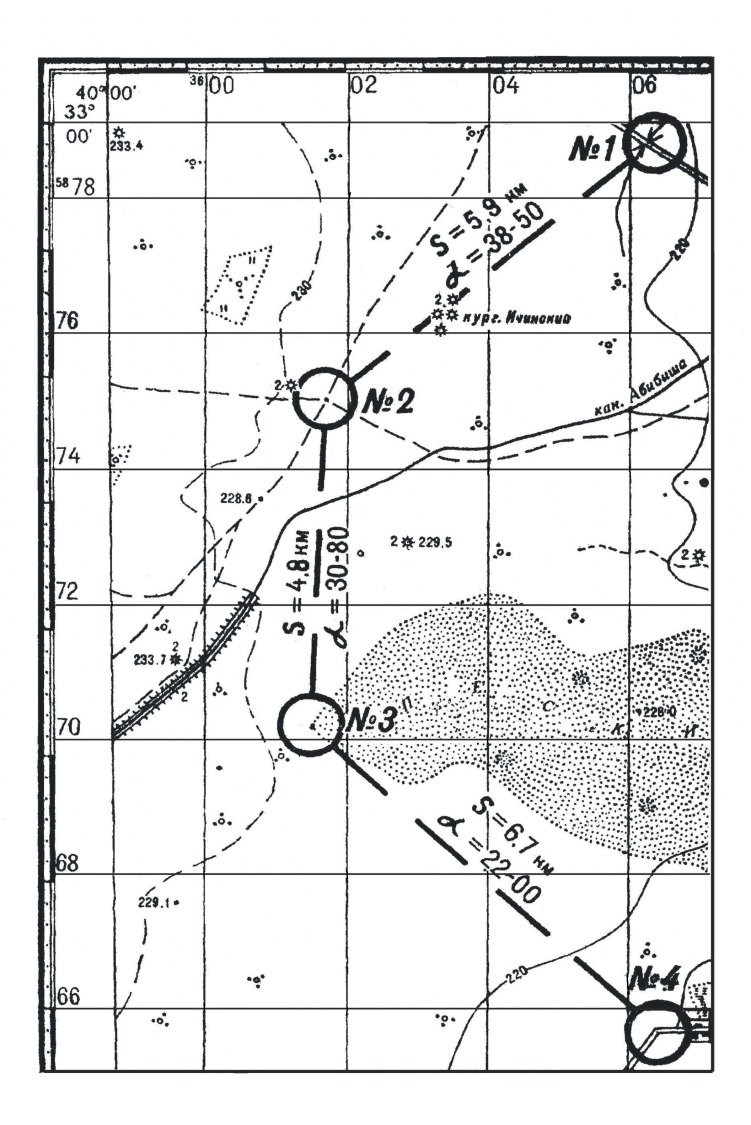
Рисунок 3.4 – Карта, подготовленная для выдерживания маршрута
по гирополукомпасу
Дирекционные углы (магнитные азимуты) направлений определяют по карте с помощью транспортира, артиллерийского круга или хордоугломера с точностью до 1°. Если исходной точкой является пункт ГГС, то дирекционные углы выписывают из каталога или определяют решением обратной геодезической задачи.
Расстояния определяются по карте с точностью до 1 мм в масштабе карты. При движении по холмистой, горной местности в измеренные по карте расстояния вводят поправку на рельеф.
При подготовке исходных данных для движения военнослужащие в составе экипажа (расчета) выполняют норматив № 14 по Военной топографии.
Норматив № 14 «Подготовка исходных данных и гирополукомпаса для движения в заданном направлении»
На карте указаны исходный и конечный пункты маршрута движения протяженностью 10-15 км. Оценить местность и с учетом ее проходимости, маскировочных и защитных свойств выбрать маршрут из двух звеньев (с одним поворотным пунктом) Определить расстояние и магнитный азимут каждого звена и оформить схему. Включить гирополукомпас. Определить на исходном пункте по магнитному компасу азимут продольной оси машины и установить его на шкале гирополукомпаса. Довернуть машину в сторону движения.
Ошибка в определении длины каждого звена маршрута не должна превышать 1 мм в масштабе карты, магнитного азимута – 30 (0-50).
Время на выполнение норматива отсчитывается от момента окончания постановки задачи до доклада о готовности к движению:
| Время на выполнение норматива
|
|
| Отлично
| Хорошо
| Удовлетворительно
|
| днем
| 6 мин
| 7 мин
| 9 мин
|
| ночью
| 8 мин
| 9 мин
| 11 мин
|
Ориентирование машины на исходной точке маршрута включает определение магнитного азимута (дирекционного угла) направления продольной оси машины и установку этого угла на курсовой шкале гирополукомпаса. Оно выполняется по компасу, линейному ориентиру или направлению на удаленный ориентир. В ночное время ориентирование машины может быть выполнено по Полярной звезде.
По компасу машину ориентируют, когда с исходной точки не видно ориентиров. На расстоянии 50 м от машины компасом измеряют магнитный азимут направления вдоль борта машины, затем для контроля измеряют азимут вдоль другого борта машины.
Среднее значение из измеренных азимутов является величиной магнитного азимута продольной оси машины, которую устанавливают на курсовой шкале прибора при включенном гирополукомпасе.
После этого машину медленно поворачивают так, чтобы указатель отсчета на курсовой шкале установился против значения азимута направления движения на первом звене маршрута.
По линейному ориентиру машину ориентируют следующим образом. На исходной точке машину устанавливают вдоль линейного ориентира (дороги, просеки, линии связи или электропередачи и т. п.). Для этого на угломерном устройстве ставят отсчет 0-00 (или 30-00), затем машину медленно продвигают вперед с одновременным поворотом в нужную сторону до тех пор, пока центральная марка прицела (перекрестие) не будет направлена точно вдоль линейного ориентира. При этом положении машины на шкале гирополукомпаса устанавливают величину заранее определенного по карте дирекционного угла направления линейного ориентира. После этого машину медленно разворачивают до тех пор, пока указатель отсчета не станет против значения дирекционного угла направления движения (рисунок 3.5).
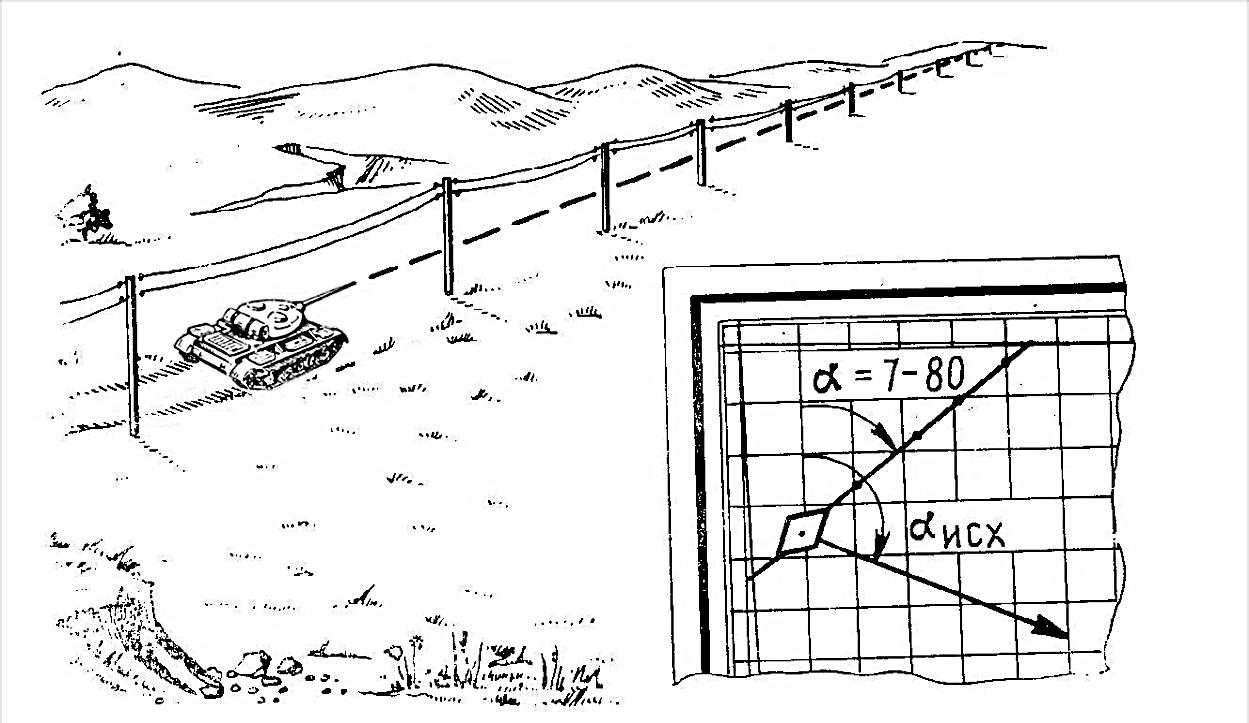
Рисунок 3.5 – Начальное ориентирование машины по линейному ориентиру
По направлению на ориентир машину ориентируют при переправах танков под водой, а также в тех случаях, когда движение совершается в одном направлении. Машину устанавливают на исходной точке так, чтобы был виден ориентир, указанный по направлению движения. Башня боевой машины устанавливается так, чтобы отсчет на башенном угломере был равен 0-00 (или 30-00). После этого постепенным передвижением машины центральную марку прицела (или перекрестие визирного устройства) совмещают с направлением на ориентир. Затем на курсовой шкале гирополукомпаса устанавливают отсчет 0-00 и начинают движение.
По Полярной звезде машину ориентируют в следующем порядке. Замечают или выставляют искусственный ориентир в направлении проектирования Полярной звезды на линию горизонта. При отсчете башенного угломера 0-00 (или 30-00) добиваются совмещения центральной марки прицела (или перекрестия визирного устройства) с направлением на ориентир. На курсовой шкале гирополукомпаса устанавливают отсчет, равный нулю, затем машину медленно поворачивают до тех пор, пока на курсовой шкале не установится отсчет, равный дирекционному углу направления движения.
Точность начального ориентирования машины по Полярной звезде и по компасу при тщательном выполнении приемов составляет около 3°, при ориентировании по линейному ориентиру и направлению на ориентир – около 1°.
Рекомендуется через каждые один – два часа движения уточнять курс на точках поворота маршрута (ориентирах), то есть переориентировать машину одним из изложенных выше способов.
Выдерживание направления движения по гирополукомпасу осуществляется путем наблюдения за положением шкалы относительно индекса. При прямолинейном движении машины отсчет по шкале сохраняется. Изменение отсчета показывает, что машина отклонилась от заданного направления.
Движение по гирополукомпасу аналогично движению по азимуту – машина движется по прямым линиям от одной точки поворота маршрута (ориентира) к другой. При этом необходимо вести машину так, чтобы на протяжении всего участка маршрута от одной до следующей точки поворота отсчет на курсовой шкале сохранялся неизменным или изменялся минимально.
Строго прямолинейное движение машины на местности затруднено, так как неизбежны кочки, воронки, ямы, крен машины и объезд мелких препятствий (объезд значительных препятствий предусматривается заранее при подготовке карты). Все это вызывает почти непрерывное колебание отсчетов по шкале. Чтобы существенно не отклониться от намеченного маршрута, объезд незначительных препятствий выполняется поочередно справа и слева. Пройденное расстояние между точками маршрута определяется по спидометру.
Проехав намеченное расстояние, находят точку поворота (ориентир), на котором машину поворачивают в направлении следующей поворотной точки (ориентира) и продолжают движение.
При ориентировании по гирополукомпасу так же, как и при ориентировании на машине без навигационных приборов, следует по пройденному машиной пути мысленно фиксировать на карте продвижение по маршруту.
Точность выдерживания маршрута по гирополукомпасу зависит от ряда факторов. Основные из них: погрешности определения по карте исходных данных; погрешности ориентирования машины на исходной точке маршрута; уход главной оси гироскопа; недостаточно тщательное удержание требуемого отсчета против индекса прибора при вождении машины; ошибки в определении расстояний по спидометру.
Если имеются навыки вождения машины по гирополукомпасу (при отклонении установленного отсчета по шкале от индекса в пределах двух делений), то средняя ошибка при движении в одном направлении не превышает, как правило,
2 % пройденного расстояния. Если маршрут движения имеет несколько точек поворота, величина ошибки за 1-2 ч движения составляет около 5 % пройденного пути.
Максимальную ошибку при выдерживании маршрута по гирополукомпасу дает погрешность определения исходного магнитного азимута (или дирекционного угла), поэтому первоначальное ориентирование машины и широтную балансировку гироскопа нужно проводить особенно тщательно. Следует помнить, что ошибка в определении исходного магнитного азимута (дирекционного угла) в
0-01 влечет за собой ошибку в 1 % от пройденного пути.
Гирополукомпас на марше в условиях ограниченной видимости и ночью может использоваться и при управлении подразделением. При выдвижении на исходный рубеж и движении в атаку на курсовых шкалах гирополукомпасов боевых машин устанавливают одинаковое значение курса (обычно равное нулю). Для одновременного поворота всех боевых машин в определенном направлении подается команда, например, «Всем, курс 15-00». По этой команде водители поворачивают машины до установки на курсовых шкалах данного отсчета и продолжают движение.






