Представим схематически одну плоскую гармонику морского волнения в горизонтальной системе координатхоу, начало которой связано с местом антенны РЛС (рис. 7.5). На этой схеме ор - ось направления бега волн, перпендикулярная к их гребням. Расстояние Ар между соседними гребнями по этой оси представляет собой длину волны V Уголqмежду осьюох и обратным направлением ор (направлением, откуда приходят волны) называется курсовым углом волн.
Промежутки между соседними гребнями волн по направлениям ох иоу обозначим соответственно Ах, Ау. Учитывая изложенное выше, можно получить следующие выражения для угловых частот волнения по осям ох, оу, ор:
ах = 2л/Ах, (Оу = 2л/Ау, сор = 2л/Ар = 2 я/Л*. (7.2)
| Рис. 7.5. К характеристике параметров плоских волн.
|
/^частота называется частотой формы или пространственной частотой волны. Ее можно рассматривать как двухмерный вектор а>р = (о)х,о)у) с координатами а>х, соу. Модуль этого вектора равен:
сор = ^ +0)2у. (7.3)
Касаясь частоты волнения по времени, следует отметить, что ее значение зависит от системы отсчета, в которой наблюдается волнение. Г-частоту волнения в координатной системе (£>) обозначим
символом <d\qS). Величина связана с частотой формы волны
следующим соотношением:
где - vffi- скорость перемещения гребня волны по оси ор в выбранной системе отсчета (Q).
Частоту волнения в (о)-системе координат, связанной с водной массой, на поверхности которой образуются волны, называют истинной (собственной) частотой волнения со,. Скорость
перемещения гребня плоской волны по оси ор в системе отсчета (о)
равна собственной скорости ее бега по водной поверхности.
Истинная скорость бега плоской морской волны связана с частотой формы этой волны соотношением, полученным JleБлондом и Мусаком:
V ар
В этой формулеg- ускорение силы тяжести,Н- глубина моря. Из выражений (7.4), (7.5) следует, что собственная частота плоской волны будет равна:
a>lo)= а, = tat\h(copH). (7.6)
Частота волнения в(G)-системе отсчета. Если координатная система, в которой наблюдается волнение, связана с Землей, то скорость бега волн в ней vfflскладывается из собственной скорости Vwперемещения волны (относительно воды) и проекцииVTpскорости
VTповерхностного течения на ось ор. Течение с водной массой переносит всю систему плоских волн.
Подставляя выражение (7.5) в (7.4) с учетом того, что (0 = (G),
получимt-частоту волнения cojG)при рассмотрении его в неподвижной относительно грунта координатной системе:
a>lG)= Jgaptanh(a>pH) + сорVTp, (7.7)
Частота волнения в координатной системе (s). Если наблюдать волнение на движущемся судне, то
= ^gcop \ntv {copH) -o)pV 'p = Jgcoptar >h (<DpH) -cop {Vp - VTp) (7.8)
гдеVp, V'p- проекции на осьopвектора V скорости судна
относительно грунта и вектора V' скорости судна относительно воды (V = V' + VT).
Наблюдаемая на движущемся судне частота волнения со^называется кажущейся частотой.
Из (7.8) следует, что если известна частота волненияоу^, глубина
моря и вектор V скорости судна относительно грунта, то может быть определена составляющая скорости поверхностного течения УТр.
Интерпретация сигналов РЛС от моря.Как высота волныh, величинаUнапряжения принятого РЛС и усиленного до определенного уровня эхосигнала от моря может рассматриваться как случайная функция аргументов х, у, (:
U ~Fv {xty,t). (7.9)
ФункцияU(7.9) отражает с определенными искажениями функцию h(7.1). Поэтому ее называют радиолокационным образом h.
Задача получения параметров волнения состоит в оценке характеристик функции (7.1) по ее радиолокационному образу (7.9).
7.4.3. Принцип определения параметров морского волнения по данным PJIC.
При популярных пояснениях и при грубых расчетах волнение может представляться только главной своей гармоникой. Такой тип волнения называется регулярным. Исходя из регулярности волнения, поясним принцип определения его параметров по данным РЛС.
При работе РЛС появляется радиолокационный образ взволнованной субакватории около судна, благодаря отражению посылаемых РЛС сигналов от склонов волн, обращенных к антенне, и отсутствию эха от склонов волн, находящихся в зоне радиолокационной тени. Наилучшее условие для отражения радиоволн соответствует направлению оси антенны в сторону, откуда приходят морские волны. В этом случае будет наблюдаться максимальная амплитуда эхосигналов моря.
При обработке эхосигналы от моря представляются в цифровой форме в виде матрицы по х и у, где значения матрицы характеризуют амплитуду эха от каждой точки субакватории. Учитывая, что скорость вращения антенны достаточно велика, цифровой образ субакватории, полученный при одном обзоре антенны, считается относящимся к одному моменту времени.
Анализируя цифровой образ субакватории, можно установить направлениеq,по которому наблюдается максимальная Аи амплитуда эхосигналов, и определить частоту формы регулярной волны. Для улучшения точности эту процедуру можно выполнить для цифровых образов нескольких последовательных обзоров PJICи полученные результаты усреднить.
Зная Аи> можно найти высоту волн. Амплитуда отраженного от склона волны эхосигнала пропорциональна высоте волны. На зависимость между амплитудой эхосигнала и высотой волны влияет вид антенны, ее высота и тип PJIC. Приближенно эта зависимость может быть описана выражением:
hw =k 0 +k ]Au, (7.10)
где ко, кх - эмпирически определяемые для каждого судна коэффициенты.
Цифровые образы последовательных обзоров относятся к разным моментам времени. Путем сравнения данных этих образов, можно установить скорость бега волн в используемой системе отсчета. Затем, с учетом (7.7) или (7.8) найти собственную ^-частоту волнения и определить другие его параметры.
7.4.4. Алгоритм СМПВ.
Основные понятия и определения. Действительное волнение моря является нерегулярным процессом. Кроме того, на эхосигналы РЛС влияют шумы приемника и искажения радиоволн при их прохождении над водной поверхностью. Все это дало основание рассматривать эхосигналы от моря в виде случайной функции (7.9) и использовать,методы теории случайных функций для извлечения информации о параметрах волнения из данных РЛС [31-34].
Напомним, что случайной функцией называется функция, которая при любом значении аргумента является случайной величиной. Аргумент случайной функции - детерминированная величина.
Случайная функция, аргументом которой является время, называется случайным процессом. Случайный процесс называется стационарным, если его математическое ожидание и дисперсия постоянны, а корреляционная функция зависит только от разности моментов времени, для которых взяты ординаты случайной функции.
Спектральная функция S(u)является важнейшей характеристикой случайного стационарного процесса. Она представляет плотность распределения дисперсии случайного процесса по различным угловым частотам (элементарным гармоникам). Значения дисперсий пропорциональны квадратам амплитуд гармоник. Квадратам амплитуд пропорциональна и энергия процесса. Поэтому спектральная функция одновременно является и характеристикой распределения энергии процесса по частотам, показывая, какую долю энергии несет та или иная гармоническая составляющая. Спектральную функцию называют также функцией спектральной плотности.
Случайную функцию нескольких переменных принято именовать случайным полем. Подобно понятию стационарности процесса вводится понятие однородности поля. Случайное поле называется однородным, если его математическое ожидание постоянно, а корреляционная функция зависит только от разности векторов аргументов. Важной характеристикой однородного случайного п- мерного поля является многомерная спектральная функцияS(w!, w2,..., w„), называемая также спектральным г полем или спектральным доменом.
| 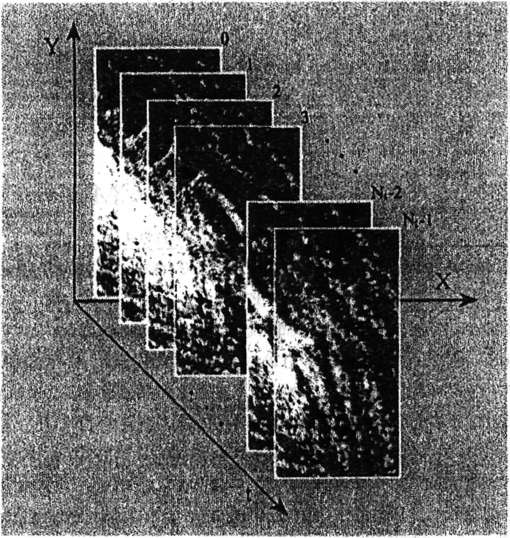
Рис. 7.6. Серия последовательных необработанных данных РЛС.
|
Преобразование эхосигналов PJICв цифровой вид. Полученная с приемника РЛС в течение определенного интервала времени совокупность эхосигналов моря представляет собой реализацию однородного случайного трехмерного поля (7.9). Эта реализация может быть представлена в виде серии последовательных радиолокационных образов субакватории, соответствующих оборотам антенны (рис. 7.6) [28].
С помощью высокоскоростного дигитайзера принятые аналоговые эхосигналы от моря преобразуются в цифровую форму, и передается в ПК. Анализируемый ПК сигнал состоит из серии последовательных цифровых образовсубакватории, соответствующих оборотам антенны.
Таким образом, интервал дискретизации эхосигналов РЛС по времени равен периоду обращения антенны. Интервал квантования образов субакватории по х, у выбирается в зависимости от разрешающей способности РЛС, которая определяется шириной диаграммы направленности антенны в горизонтальной плоскости и длительностью зондирующего импульса.
Обработка данных. Обозначим преобразованную в цифровой вид совокупность последовательных эхосигналов от моря как UxyrПо
значениямVxyt, принадлежащих субакватории, в компьютере С МП В
оценивается спектральная функция S^\cox,o)yyo)j~^) эхосигналов как
однородного случайного трехмерного поля. Напомним, что спектральная плотность представляет распределение дисперсии (энергии) поля по различным гармоникам. Каждая такая гармоника может быть охарактеризована частотой формы сор = (сох,(оу) иt-
частотой.
На вид спектральной функцииSjp(сох, о)у, со^) влияют:
• модуляция водной поверхности волнами,
• шум от мелкой ряби на склонах волн,
• шум приемника PJ1Cи искажения ее сигналов во время прохождения над водной поверхностью.
• тип системы отсчетахоу.
В процессе нахождения на ПК параметров морского волнения
вначале изS^(сох,соу,cof^)выделяется компонентаS<^\a>xi(6y,(ol),
характеризующая собственно волнение. Шумы, искажающие спектр волнения, устраняются с помощью специальных фильтров. Влияние на спектр поверхностного течения или скорости хода исключается для каждой гармоники с использованием формул (7.7) или (7.8).
Затем поS^3\cox,(oy,a)l)находятся следующие спектральные
образования:
- Частотный спектр волнения: S(cot) = 2 • J S^\cox,coy,cot)d2cop;
(О),
Двухмерный спектр по х- и ^-частоте:
S {2 \cox,coy) = 2- js {i ) ((0x,6)y,6}t)d \;
со, >0
Спектр по направлению и частоте:
sV\a>l,q) = S™[a>x(cot,q\vy(col,q^p^.
dco,
Частотный спектр волнения может быть также получен из двухмерного спектраS^2\o)t,q)с помощью интегрирования по курсовому углу:
п
S(cot)= js {2\a>t,q)dq.
-п
Пику спектральной функцииS(cot) отвечаетt-частота
преобладающего волнения. Максимуму спектраS(-2\col,q) соответствует какt-частота преобладающего волнения, так и главное направление распространения волн. По частоте преобладающего волнения определяются его период и длина волны.
Высота значительных морских волн вычисляется по приближенной формуле:
h]n =k0+k\yl~R, где к0, к\ - эмпирически определяемые для каждого судна коэффициенты,R- отношение полной энергии эхосигналов от волн,
найденной по спектральной функции S^\a>x,cay,a)f^), к энергии
суммарного шума.
Кроме полученных параметров, при анализе эхосигналов РЛС оцениваются средний период волнения и высота максимальных морских волн.
8. Система планирования и оптимизации
пути
8.1. Общие сведения о планировании рейса.
Задача планирования рейса. Для всех судов требуется планировать рейс и переход судна. Эта необходимость определяется наличием большого числа факторов, влияющих на безопасное плавание, чистоту окружающей среды и эффективность перевозки. Одни факторы затрудняют движение всех судов. Другие причины влияют на плавание отдельных видов судов, например, крупнотоннажных, или судов со слабой машиной, либо перевозящих опасные грузы судов и т.д.
Минимальные требования к составлению плана перехода содержатся в «Руководстве по планированию рейса», утвержденного Резолюцией ИМО А.893(21), ноябрь 1999 г.
В этом документе определены четыре логически следующие друг за другом этапа планирования и выполнения рейса:
- Оценка всей относящейся к рейсу информации (Appraising all relevant information);
- Планирование предполагаемого рейса (Planningtheintendedvoyage);
- Выполнения плана, принимая во внимание превалирующие условия на переходе (Executingtheplantakingaccountofprevailingcondition);
- Непрерывный мониторинг соответствия движения судна составленному плану (Monitoringthevessel'sprogressagainsttheplancontinuously).
План перехода требуется составлять в начале рейса и корректировать по мере необходимости в процессе его выполнения. При планировании должна быть оценена вся относящейся к переходу судна информации, и разработан подробный график выполнения предстоящего рейса от причала порта отхода до причала порта назначения, включая и районы, где лоцман должен быть на борту судна.
Планирование рейса связано не только с установлением безопасного и эффективного пути следования к пункту назначения. Оно также включает определение будущего образа действий при выполнении перехода, закладку основ для принятия будущих решений, для предотвращения возможности ошибочных действий. Иными словами, планирование должно включать формирование стратегии управления. Напомним, что под стратегией управления в общем случае понимается план (алгоритм), определяющий последовательность управляющих действий, обеспечивающих решение задачи, имеющей определенную протяженность во времени.
С целью выработки стратегии выполнения рейса производится прогнозирование обстоятельств, которые могут возникнуть на предстоящем переходе. Такое прогнозирование будущих условий работы является основным средством совершенствования плана перехода.
При получении прогностических оценок необходимо учитывать, что изменение одних внешних факторов, влияющих на движение судна и его безопасность, носит детерминированный (предсказуемый с требуемой точностью) характер. Состояние других факторов изменяется случайным образом и точно не может быть спрогнозировано. К детерминированным факторам можно отнести, например, значения приливных уровней, которые для интересующего пункта на заданное время можно рассчитать достаточно точно. Прогнозирование состояния других факторов, например, погодных условий, может быть выполнено лишь с определенной вероятностью.
Для предсказания погодных условий на участках планируемого пути используются два вида прогнозов - долгосрочные и кратковременные.
Долгосрочное прогнозирование основывается на среднестатистических данных о погоде на каждый месяц или на сезон года, полученных по результатам многолетних гидрометеорологических наблюдений. Такие среднестатистические сведения о погодных условиях для разных акваторий приведены в различных навигационных пособиях (в лоциях и в других руководствах для плавания), на климатических (лоцманских) картах и в некоторых других изданиях. По этой информации оцениваются погодные условия на разных участках будущего пути на время всего рейса. Долгосрочное прогнозирование погоды применяется обычно при составлении плана рейса до его выполнения.
Краткосрочные прогнозы (до семи суток вперед) получаются по каналам связи от метеорологических центров и служб. Они представляют собой прогнозы развития текущего состояния погоды, основанные на оперативном наблюдении за атмосферными процессами. Эти прогнозы используются как при планировании рейса перед его выполнением, так и в процессе рейса с целью проверки соответствия составленного плана уточненным условиям на оставшемся пути и для корректуры плана перехода в случае необходимости.
Тот факт, что прогнозы не всегда сбываются, не может служить основанием для отказа от анализа влияния прогнозируемых условий на движение судна, его безопасность и чистоту окружающей среды, а также от проработки мер, которые будут необходимы для обеспечения эффективного и безопасного плавания в ожидаемых условиях.
Рациональность составленного плана перехода в значительной мере определяет эффективность, безопасность выполнения рейса и его экономические показатели. Поэтому планированию рейсов в судоходных компаниях уделяется первостепенное внимание.
Необходимая информация,.При составлении плана перехода требуется учитывать:
- навигационные и гидрометеорологические условия; установленные пути движения, системы судовых сообщений, службы движения судов, меры по защите морской среды;
состояние судна и его механизмов, оборудование, эксплуатационные и другие ограничения;
маневренные и мореходные качества судна;
особые свойства груза, условия его сохранной перевозки, укладку,
крепление;
интенсивность движения судов;
- коммерческо-правовые условия;
другие факторы, влияющие на безопасность плавания, эффективность рейса, чистоту окружающей среды.
Источники, в которых можно найти эту информацию, четко определены в руководствах, касающихся планирования рейса [16, 17, 23].
Этапы планирования. Условно в процессе планирования перехода можно выделить следующие этапы:
• Подбор и общая оценка всей относящейся к рейсу информации;
• Определение начального варианта пути, подбор карт и пособий на переход;
• Прогностическая оценка внешних условий на выбранном маршруте;
• Анализ влияния условий предстоящего плавания на судно и груз;
• Оценка плана перехода и его оптимизация по различным критериям.
• Документирование результатов планирования.
Рассмотренная схема составления плана перехода является обобщенной. Количество этапов, их последовательность, содержание в разных ситуациях не являются столь строго определенными. В действительности возможно смешивание входящих в разные этапы операций, некоторые из них могут не производиться. Однако при автоматизации планирования рейса приведенная схема является полезной, так как систематизирует этот процесс.
Приоптимизация плана перехода обычно накладывается условие обеспечения безопасности судна, груза, чистоты окружающей среды. Критерий эффективности перехода определяется в зависимости от основных задач рейса. Он может предусматривать минимизацию: времени перехода;
расхода топлива при заданном времени прибытия в конечный пункт; - времени отступления от расписания.
Назначение СПП и ее состав.
Назначение системы. Для повышения эффективности эксплуатации судов создаются специальные автоматизированные системы планирования рейсов. Они разделяются на береговые и бортовые системы. Ниже рассматриваются только бортовые СПП, входящие в состав ИСМ.
Оборудование для планирования перехода представляет собой электронную систему поддержки решений судоводителя по выбору пути судна. Она служит для облегчения и ускорения планирования эффективного маршрута перехода с обеспечением высокой навигационной безопасности, мореходности судна и чистоты окружающей среды.
Готовых алгоритмов, позволяющих автоматически учесть все влияющие на предстоящий переход факторы и составить оптимальный план, нет. Поэтому на современном этапе задачи по выбору стратегии плавания разделяются между электронной системой и судоводителем. На электронную систему возлагается:
• оказание помощи в выборе первоначального варианта пути;
• обеспечение возможности быстрого получения информации для оценки внешних условий предстоящего плавания;
• предоставление «инструментов» для анализа влияния условий будущего плавания на судно и груз;
• создание возможности для оперативных оценок плана перехода по разным показателям;
• предоставление «инструментов» для редактирования выбранного маршрута и его оптимизации;
• документирование результатов планирования.
Задачей судоводителя является оптимизации с помощью СПП плана перехода перед рейсом и в процессе его выполнения на основании своего опыта, профессиональных знаний и информации, получаемой от электронной системы и от других источников.
Структура системы и основные требования к ее использованию. Бортовая СПП строится на основе персонального компьютера. Она включает в себя: системный блок, клавиатуру, манипулятор, средства отображения, документирования и регистрации информации, интерфейсные устройства для взаимодействия с другой аппаратурой, информационные ресурсы.
При планирования рейса с помощью электронной системы рекомендуется применять только официальные электронные карты. При наличии на судне ECDIS, если официальными векторными данными, удовлетворяющими требованиям к ECDIS, обеспечен весь переход судна, то намечаемый путь может наноситься только на ЭК, без графической его прокладки на бумажных картах. В противном случае, а также при использовании официальных растровых карт, намеченный маршрут должен наноситься как на электронные, так и на бумажные карты.
Системы с неофициальными ЭК не рекомендуется применять для планирования пути и исполнительной прокладки.







