Решение
1. Для определения опорных реакций рассмотрим равновесие балки АВ.
2. К балке АВ приложены активные силы: F, пара сил с моментом М и равномерно распределенная нагрузка интенсивностью q. Заменим распределенную нагрузку эквивалентной сосредоточенной Q, равной по модулю Q = q· 2 a = 30 Н и приложенной в средней точке нагруженного участка.
Введем декартову систему координат Аxy, совместив начало координат с неподвижным шарниром А и направив осьАx вдоль балки.
На балку наложены две связи: неподвижная шарнирная опора в точке А иподвижная шарнирная опора (каток) в точке В. Отбросим мысленно эти связи, заменив их соответствующими реакциями. Реакция R A неизвестна по величине и направлению, поэтому разложим её на две неизвестные по величине составляющие X A, Y A, направленные по координатным осям. Опора в точке В не препятствует её перемещению вдоль наклонной плоскости и, следовательно, реакцию  B следует направить перпендикулярно наклонной плоскости, то есть эта реакция известна по направлению, но неизвестна по величине (рис.57).
B следует направить перпендикулярно наклонной плоскости, то есть эта реакция известна по направлению, но неизвестна по величине (рис.57).
3.Имеем произвольную плоскую систему сил.
4. В задаче имеется три неизвестных скалярных величины: XA, YA, RB. Поскольку для произвольной плоской системы сил имеется три независимых уравнения равновесия, данная задача является статически определимой[4].
Рис.57
Составим уравнения равновесия для полученной эквивалентной силовой схемы.
Эти уравнения равновесия записываются в рассматриваемом примере следующим образом:
∑ X = 0, X a – R b sin 30 ° = 0; (1)
∑ Y = 0, Y a – Q + F + R b cos 30° = 0;(2)
∑momAF = 0,-Q∙ a + F ∙2a + M + (R b cos 30 ° ) ∙ 3a = 0. (3)
Напомним, что скалярные моменты сил берутся со знаком плюс, если они направлены против хода часовой стрелки. При вычислении момента реакции R b относительно точки А выделена её вертикальная составляющая, равная R b cos 30° и имеющая плечо 3 a, а горизонтальная составляющая имеет нулевой момент относительно точки А.
Из третьего уравнения (2) и (3) находим:
RB = (Q - 2F - M / a)/(3cos 30°)  - 50.0 Н.
- 50.0 Н.
Подставив в первое и второе, получим:
Х A =((Q - 2F - M / a)/(3cos 30°))sin30° -25.0 Н,
YA = (2 Q - F + M / a)/3 13,3 Н.
Полученные отрицательные значения RB и XA означают, что сила R b исоставляющая реакции X A противоположны показанным на рис.57направлениям этих векторов.
Величина реакции RA = (XA2 + YA2)  28.3 Н.
28.3 Н.
Пример на равновесие произвольной пространственной системы сил
Горизонтальная прямоугольная плита весом Р (рис.58) закреплена с помощью сферического в точке А, цилиндрического шарнира в точке В и
невесомого шарнирно опертого стержня ДД  . На плиту в плоскости параллельной плоскости xz, действует сила F, а в плоскости, параллельной yz, - пара сил с моментом М.
. На плиту в плоскости параллельной плоскости xz, действует сила F, а в плоскости, параллельной yz, - пара сил с моментом М.
Дано: Р = 3 кН, F = 8 кН, М = 4 кН ∙ м,
ά = 60°, АС = 0,8 м, АВ = 1,2 м,
ВЕ = 0,4 м, ЕН = 0,4 м.
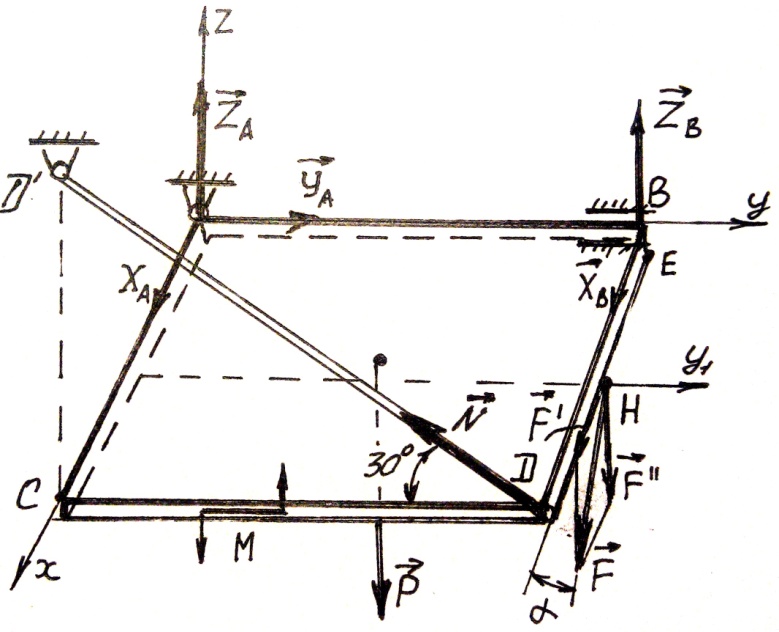
Определить: реакции опор А, В и стержня ДД .
Рис.58
Решение.
1. Рассмотрим равновесие плиты АВДС.
2. На плиту действуют активные силы: Р, F и пара сил с моментом М, а также реакции связей. Реакцию неподвижного сферического шарнира разложим на три составляющие X  ,Y
,Y  ,Z
,Z  , неподвижного цилиндрического шарнира – на две составляющиеX
, неподвижного цилиндрического шарнира – на две составляющиеX  ,Z
,Z  (в плоскости, перпендикулярной оси шарнира); реакцию N стержня направляем вдоль стержня отД к Д , предполагая, что он растянут.
(в плоскости, перпендикулярной оси шарнира); реакцию N стержня направляем вдоль стержня отД к Д , предполагая, что он растянут.
3. Имеем произвольную пространственную систему сил.
4. Составим уравнения равновесия для полученной эквивалентной силовой схемы.
Эти уравнения равновесия записываются в рассматриваемом примере следующим образом:
∑X =0,X + X + Fcos60° = 0;
∑ Y = 0,Y −N cos 30° = 0;
∑Z= 0.Z + Z −Р +N sin 30° −Fsin 60° = 0;
∑mom  F = 0,М−Р∙АВ/2 + Z ∙АВ−Fsin 60°∙АВ+N sin 30°∙АВ = 0;
F = 0,М−Р∙АВ/2 + Z ∙АВ−Fsin 60°∙АВ+N sin 30°∙АВ = 0;
∑ mom  F = 0,Р∙АС/2 + Fsin 60°∙ЕН−N sin 30°∑АС−Fcos60°∙ВЕ = 0;
F = 0,Р∙АС/2 + Fsin 60°∙ЕН−N sin 30°∑АС−Fcos60°∙ВЕ = 0;
∑mom  F = 0,−X ∙АВ−N cos 30°∙АС−Fcos60°∙АВ = 0.
F = 0,−X ∙АВ−N cos 30°∙АС−Fcos60°∙АВ = 0.
Подставив в составленные уравнения числовые значения всех заданных
величин и решив эти уравнения, найдем искомые реакции: X = 3,42 кН; Y = 5,13 кН;Z = 4,83 кН;X = −7,42 кН;Z = 2,13 кН; N = 5,93кН. Знак «−» указывает на то, что реакция X направлена противоположно показанной на рис.58.
Список использованной литературы
1.Ишлинский А.Ю.Задачи механики. Препринт №185.М.:Ист-т пробл. Механики АН СССР, 1981.-38 с.
2.Конспект лекций по теоретической механике: Учебное пособие /В.А.Аршинова, А.И.Зайцев – Яросл. гос. ун-т. – Ярославль, 1998.- 176 с.:ил.- (Высшее образование).
3.Теоретическая механика: учебник /Н.Г.Васько, В.А.Волосухин, А.Н.Кабельков, А.Н.Бурцева – Ростов н/Д: Феникс,2012. – 302 с.:ил.- (Высшее образование).
4.Леготин С.Д. Основы теоретической механики: электронный учебник /М. Гос. Индустриальный ун-т, 2008.-136 с.:ил.-(Высшее образование).
За помощь при создании данного пособия выражается благодарность студентам машиностроительного факультета Аджояну М.Р и Выборнову Н.С.
[1] Единицей измерения силы в системе единиц СИ является Ньютон (Н); применяется и более крупная единица 1 кН=1000Н.
[2] Ортом вектора называется единичный вектор, направленный в ту же сторону и приложенный в той же точке, что и заданный вектор.
[3] Это следствие, также как и часть аксиом и теорем статики, применимо только для абсолютно твердого, не деформируемого тела.
[4] статически определимой задача статики называется, если число неизвестных компонентов реакций равно числу уравнений равновесия, и наоборот, задача статики называется статически неопределимой, если число неизвестных компонентов реакций больше числа уравнений равновесия.


















