Руление для вертолета Ми-8 является основным видом передвижения на небольшие расстояния, особенно вблизи летательных аппаратов и других препятствий. На рулении установлен ряд ограничений и если их невозможно выдержать, то необходимо производить подлет. Вертолет Ми-8,*как и другие вертолеты, особенно с трехколесным шасси, подвержен на рулении возможности опрокидывания. Благодаря ряду конструктивных мер он меньше подвержен «земному резонансу» по сравнению с другими вертолетами. Несмотря на это, для вертолета установлены определенные ограничения. Например, тяга несущего винта должна быть на рулении существенно меньше веса вертолета, приблизительно составлять 1/3 веса, поэтому строго ограничивается мощность при рулении,
Реактивный момент несущего винта на режиме руления уравновешивается путевым моментом хвостового винта и частично за счет трения колес о землю.
Вертолет Ми-8 обладает хорошими рулежными свойствами, имеет высокую маневренность и относительно легко управляем при рулении. Хорошей маневренности способствует наличие у вертолета самоориентирующейся передней стойки шасси. Но имеются и некоторые трудности, особенно при рулении по скользкому грунту, когда при недостаточном трении колес и большой массе вертолета он может получить боковое движение — юз. При рулении по пыльным вертодромам или по свежевыпавшему снежному покрову поднявшаяся пыль или снег от струи несущего винта, ухудшают видимость в большей степени, чем при рулении на других вертолетах (кроме Ми-6) вследствие большей удельной нагрузки на ометаемую площадь.
4 2426 '97
Руление начинается неполным отклонением ручки циклического шага вперед, в противном случае возможны удары лопастей о нижние упоры горизонтальных шарниров. Не рекомендуется увеличивать мощность более чем на 6° по указателю общего шага винта и раскачивать вертолет педалями.
Скорость на рулении выдерживается наклоном силы тяги несущего винта при помощи ручки циклического шага. Она должна быть не более 20 км/ч. При большей скорости вертолет раскачивается в продольном и поперечном направлениях.
Сохранение направления при рулении и развороты осуществляются изменением величины тяги рулевого винта при помощи педалей. Для уменьшения скорости и экстренных остановок используется тяга несущего винта и тормоза основных колес, но в отличие от других вертолетов тяга используется лишь перемещением ручки циклического шага назад на незначительную величину при общем шаге несущего винта не менее 3°.
Руление на вертолете Ми-8 производится с выключенным автопилотом. Руление по поверхности вертодрома или площадки с уклоном не рекомендуется, так как при этом уменьшается запас управления до недопустимых пределов и появляется опасность опрокидывания вертолета. Летными испытаниями установлено, что при рулении на уклон величиной около 6° вертолет движется на передних колесах, задние колеса не касаются земли. Это требует повышенной мощности. При рулении поперек уклона величиной около 3° левым бортом под уклон запасы поперечного управления выходят из нормы.
При невозможности производить руление по каким-либо причинам разрешается выполнять подлет на малой высоте.
2. Схема сил и моментов, действующих на вертолет
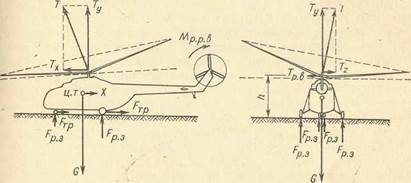
При рулении на вертолет действуют следующие силы и основные моменты (рис. 43): сила тяги несущего винта Т, сила тяги рулевого (винта Гр>в, сила сопротивления вертолета X, сила трения колес о землю Кгр, сила веса вертолета О, сила реакции земли ^р.з, реактивные моменты несущего винта Мр, рулевого винта Мр.р.в и путевой момент рулевого винта.
Сила тяги несущего винта ручкой циклического шага отклоняется вперед и вправо, поэтому она раскладывается на три составляющие: Ту —вертикальная составляющая; Тх —горизонтальная составляющая, направленная вперед, и Т2 — горизонтальная составляющая, направленная вправо. Сила тяги рулевого 1винта направлена влево.
Для равномерного и прямолинейного движения вертолета по земле должно быть соблюдено следующее равенство сил и моментов. Для равномерного движения необходимо, чтобы горизонтальная составляющая тяги несущего винта Тх была рав-
на вредному сопротивлению вертолета и силе трения колес о землю: ТХ = Х + Р^.
Для предотвращения скольжения вертолета по земле (юз), боковых давлений на пневматики колес, а также тенденции к опрокидыванию необходимо, чтобы сила тяги рулевого винта
Рис. 43. Схема сил и моментов, действующих на вертолет Ми-8 при
рулении
была уравновешена боковой составляющей тяги несущего винта: ГР.В = Г2.
Для прямолинейного движения по избранному курсу необходимо, чтобы реактивный момент несущего винта был уравновешен путевым моментом рулевого винта: М^МшВ = Му^.в =
— <* р.в 'р?в-
Кроме того, для создания устойчивого положения вертолета на земле вертикальная составляющая тяги несущего винта должна быть существенно меньше веса вертолета,
3. Особенности выполнения руления
Перед рулением проверяется работа автотриммеров путем отклонения ручки управления и педалей с нажатой кнопкой на ручке управления. Рычаги раздельного управления двигателями должны находиться в нейтральном положении — на защелках.
Для начала руления при общем шаге 1° поворотом рукоятки корректора полностью вправо довести оборты несущего винта до 95+2%. По достижении указанных оборотов несущего винта плавно отклоняется ручка общего шага вверх до 3° при весе вертолета 11100 кг и до 4° при весе вертолета более 11100 кг; а ручка циклического шага отклоняется от себя на незначительную величину.
При наличии вязкого грунта или плохо укатанного снега, если (вертолет не переходит на руление при отклонении ручки
4*
циклического шага вперед, необходимо увеличить общий шаг винта, но не более 5° при весе вертолета 11100 кг и менее и не более 6° при весе вертолета более 11 100 кг. Когда начнется движение вертолета, общий шаг необходимо уменьшить. При стра-гивании с места с такого грунта нецелесообразно отклонять ручку циклического шага вперед больше нормы, особенно до упора, так как произойдет зарывание передних колес, в результате чего увеличится нагрузка на колеса и возрастет их трение. Не рекомендуется также увеличивать общий шаг больше 5—6°: при этом значительно увеличивается тяга несущего винта, его реактивный момент и тяга рулевого винта, трение о землю уменьшится и вертолет начнет смещаться влево. Это приведет к зарыванию левого колеса, возникнет большой опрокидывающий момент и вертолет может опрокинуться. Кроме того, при большой тяге несущего винта обжатие амортизационных стоек и пневматиков колес уменьшится, что может вызвать земной резонанс1. Для страгивания вертолета с места не рекомендуется раскачивать (вертолет при помощи педалей, это может привести к поломке хвостовой балки и рулевого ©инта.
Скорость на рулении выбирается пилотом в зависимости от состояния грунта и окружающей обстановки, но она не должна превышать 15—20 км/ч. Изменять скорость необходимо с помощью ручки циклического шага, а при неровном и вязком грунте и с помощью ручки общего шага и тормозами колес. На всем протяжении руления обороты несущего винта должны удерживаться 1в пределах 95+2% при правом положении рукоятки корректора газа.
Развороты на рулении выполняются плавным отклонением педалей. Чем больше скорость, тем больше должен быть радиус разворота. Энергичные развороты с малыми радиусами недопустимы, так как даже на обычном грунте вертолет начнет скользить за счет большой центробежной силы, действующей в сторону, обратную развороту. Кроме того, юз возникает, как правило, и при обычных разворотах, но при большой силе тяги, когда вертолет находится во (взвешенном состоянии, а также при прямолинейном рулении по вязкому или скользкому грунту за счет неравенства боковой силы Тг тяге рулевого винта Гр.в. Для установления же этого равенства пилоту нечем руководствоваться, как на висении или в поступательном полете.
Радиус разворота в зависимости от величины разворота и скорости руления должен быть не менее (по следу внутреннего колеса основного шасси):
— при развороте на 90° и скорости 10 км/ч—16 м;
— при развороте на 180° и скорости 5 км/ч—5 м;
— при развороте на 180° на месте — 3 м.
 1 Земной резонанс и возможность опрокидывания вертолета рассматриваются в гл. X.
1 Земной резонанс и возможность опрокидывания вертолета рассматриваются в гл. X.
При появлении юза необходимо прекратить руление, для чего следует уменьшить мощность двигателей до минимальной, подать педаль в сторону юза, дождаться остановки вертолета, и лишь потом начать руление или разворот с меньшей скоростью.
Руление можно совершать при ветре до 20 м/с. При рулении при боковом ветре вертолет стремится развернуться носом против ветра, поэтому этот разворот нужно парировать соответствующей педалью. Кроме того, конус вращения и тяга несущего винта в этом случае заваливаются по ветру, тогда боковая сила Тг при ветре слева будет больше, а при ветре справа —.меньше, чем это необходимо. На этом основании ручку циклического шага необходимо отклонять в сторону против ветра.
При рулении по пыльному или заснеженному вертодрому при встречном ветре более 3 м/с видимость хорошая, так как вся пыль, поднятая несущим винтом, на всех скоростях руления остается позади вертолета. При незначительном встречном ветре — менее 3 м/с, в штиль или с попутным ветром, видимость может значительно ухудшиться. Поэтому необходимо рулить на повышенной скорости, но не более 30 км/ч по грунту и не более 10 км/ч по снегу. Если при таком рулении видимость не улучшается, то необходимо рулить с остановками через интервалы 30—50 м, убедиться в отсутствии препятствий при появлении видимости и лишь после этого продолжить руление. Развороты на месте на таких вертодромах или площадках запрещаются. Руление можно совершить на пыльных площадках и на площадках со свежевыпавшим снегом глубиной не более 10 см.
Для остановки вертолета на рулении необходимо перевести двигатели на малый газ (общий шаг 1°, левая коррекция), переместить ручку циклического шага.на себя не более, чем до нейтрального положения, и при необходимости применить торможение колес рычагом тормоза. Торможение вертолета или его остановку на рулении путем отклонения ручки циклического шага за нейтральное положение на себя при минимальном шаге 1° запрещено для предотвращения возможности удара лопастей о хвостовую балку. Экстренное торможение или остановка могут быть произведены незначительным перемещением ручки циклического шага на себя за нейтральное положение при общем шаге не менее 3°.
4. Ограничения при запуске двигателей и рулении
1. Запуск и остановка двигателей допускается при следующих
скорос/гях ветра в зависимости от направления: при встречном —
20 м/с, боковом — 10 м/с, попутном — 8 м/с.
2. При боковом ветре в первую очередь запускается двигатель
с подветренной стороны, чтобы уменьшить увеличение температу
ры газов у двигателя, на который дует ветер.
явится расчетным потолком висения вертолета с нормальным взлетным весом и с учетом влияния воздушной подушки. Тягу, равную максимальному взлетному весу 12000 кг с учетом влияния воздушной подушки, винт развивает на высоте 1500 м. Эта высота и является расчетным потолком висения для максимального взлетного веса вертолета с учетом влияния воздушной подушки. Эти же данные подтверждены и результатом летных испытаний. На этом основании можно сделать вывод, что потолки висения у вертолета Ми-8 как с нормальным, так и с максимальным взлетным весом большие, вертолет можно успешно эксплуатировать на высокогорных вертодромах и при различных атмосферных условиях. У него есть также резерв для дальнейшего увеличения максимального взлетного веса.
На рис. 44 показаны потребные мощности в лошадиных силах для висения вертолета Ми-8 с разными полетными весами в зависимости от высоты висения (от колес до земли) в стандартной атмосфере над уровнем моря, полученные в результате летных испытаний. Как видно по кривым этого графика, чем больше полетный вес (вертолета и высота (висения, тем больше требуется мощность двигателей для висения вертолета. Вертолет с взлетным весом 11100 кг отрывается от земли на мощности 2350 л. с, на высоте 2 м висит на мощности, близкой к номинальной — 2460 л. с. С таким весом, как установлено экспериментально, вне зоны влияния земли, т. е. на высоте более 15—20 м от земли, вертолет набирает вертикально высоту с вертикальной скоростью 1,5—1,8 м/с.
Вертолет с взлетным весом 12000 кг отрывается от земли на мощности, близкой к номинальной. На взлетном режиме такой вертолет висит на высоте 8 м. Вертолет с!взлетным весом 13000 кг на взлетном режиме работы двигателей 3000 л. с. висит на высоте 2 м.
На рис. 45 представлены потребные мощности для ©исения, выраженные через обороты турбокомпрессоров в зависимости от высоты висения и полетного веса вертолета, полученные в результате эксперимента при температуре наружного воздуха 12° С, атмосферном давлении р = 742 мм рт. ст. в штилевых условиях. Как видно, чем больше полетный вес вертолета и высота висения, тем больше требуются обороты турбокомпрессоров для висения. При указанной температуре окружающего воздуха обороты турбокомпрессоров на взлетном режиме работы двигателей будут около 98%. При данных условиях вертолет с полетным весом 13350 кг висит на взлетном режиме на высоте 1 м, а для висения его на высоте 0,5 м требуются обороты турбокомпрессора 96,5%- С полетным весом 12600 кг вертолет висит на взлетных оборотах на высоте 4,5 м. Вертолет с весом 11600 кг висит на взлетном режиме двигателей на любой высоте, даже без влияния воздушной подушки. При весе вертолета ниже 11600 кг требуется мощность ниже взлетной.
ротов турбокомпрессора соответствует прирост тяги около 400 кгс а на меньшем режиме (93-94%) -800 кгс. На высоте 7 м на режиме, близком к взлетному, 1% оборотов турбокомпрессоров дает прирост тяги не 400 кгс, а 900 кгс, а на режиме, меньше взлетного (96—97%), — около 1600 кг.
| 13000
12000
■и ооо
10000
\3000
|
|
|
| у
|
|
| У/,
|
/си
|
| /
| VI
|
|
|
|
| %,
|
| Н=1м 2 м
| 5м 7м 9 м
|
пгпк ф СР,%
т9кгс
1100
н,м
б)
Рис 46 Зависимость тяги несущего винта вертолета Ми-8 на висении
от оборотов турбокомпрессоров и высоты висения:
п т«гЯ.пятя в зависимости от оборотов турбокомпрессоров при постоянных вы-со»тах висения.^-максимальная тя?а, развиваемая винтом на взлетном реж'име
о высоты висения
от высоты висения
Как показали эксперименты, у вертолета Ми-8 полный эффект воздушной подушки зависит от высоты вертодрома^ над уровнем моря: на уровне моря полное влияние воздушной подушки достигается на высоте 15 м от колес до земли, с увеличением высоты вертодрома на каждые 500 м высота влияния воз^ душной подушки уменьшается на 1 м.
Эффект воздушной подушки в большой степени зависит от рельефа местности. Так, например, при висении над холмом эффект воздушной подушки уменьшается, так как струя воздуха под винтом деформируется в меньшей степени, что приводит к меньшему изменению скорости и увеличению давления в потоке по сравнению с висением над плоской поверхностью. Экспериментами установлено, что чем больше углы склона холма и меньше размеры холмистой площадки, тем меньше эффект. При углах склона более 45° и размерах площадки менее диаметра винта эффект воздушной подушки практически отсут-
ВЭффект воздушной подушки при висении над ямой зависит
от угла наклона стенки ямы и высоты висения (от дна ямы). Если яма имеет малые углы наклона стенок, порядка до 15°, эффект воздушной подушки будет больше, чем при висении над ровной поверхностью. Здесь прирост тяги по величине будет примерно такой, как и уменьшение тяги при висении над холмом с такими же углами склона. Объясняется прирост тяги большей деформацией струи воздуха под 1винтом. При этом скорость уменьшается, а давление увеличивается в большей степени, чем три висении над ровной поверхностью. Начало прироста тяги и ее зависимость от высоты будет такой же как и при висении над ровной поверхностью. Если яма имеет угол наклона стенок больше 15°, то эффект воздушной подушкв ухудшается: чем больше углы наклона стенок, тем меньше эффект. В зависимости от высоты висения (от дна ямы), тяга несущего винта становится меньше свободной тяги. Так, например, при наклоне стенок ямы 40° и высоте около 0,8 диаметра винта тяга уменьшается по сравнению со свободной тягой на 10%. Увеличение или уменьшение высоты приводит к меньшей потере тяги по сравнению со свободной. На высоте висения 1,2 диаметра винта и более отрицательный эффект воздушной подушки исчезает. Чем больше угол наклона стенок ямы, тем на большей высоте прекращается вредное явление эффекта воздушной подушки. Уменьшение высоты висения (ниже 0,8 диаметра винта) приводит к снижению вредного влияния ямы,, но чем больше угол наклона стенок, тем на меньшей высоте тяга становится равной свободной тяге. Снижение эффекта воздушной подушки при висении над ямой с крутыми стенками объясняется тем, что от стенок ямы происходит заброс струй в область всасывания над винтом, образуется замкнутая линия тока — вихревое кольцо, скорость потока через винт увеличивается при прочих равных условиях, что приводит к уменьшению' угла атаки лопастей и тяги винта. Если стенки ямы вертикальные (цилиндрическая яма), а диаметр ее равен двум диаметрам: винта, то развивается такое интенсивное вихревое кольцо, которое приводит к снижению свободной тяги на 30%. Если диаметр ямы будет больше или меньше двух диаметров винта, в. обоих случаях явление вихревого кольца снижается, тяга увеличивается. При диаметре ямы, близкой по размеру к диаметру винта, эффект воздушной подушки будет очень большой, больше чем над ровной поверхностью.
При висении над склонами проявляется эффект как «ямы»,, так и «холма». Если склон будет до 15°, то тяга не меняется,, так как снижение тяги за счет «холма» с одной стороны компенсируется ростом тяги за счет «ямы» с другой стороны диска.. При угле склона более 15° тяга уменьшается за счет эффекта «глубокой ямы» части диска винта, расположенной к склону.. Но вместе с тем при висении над склоном даже с малыми углами наклона на фюзеляж будет действовать сила, отталкива-
ющая вертолет от склона. Для предотвращения этого явления потребуется увеличение отклонения ручки циклического шага в сторону склона. При взлете и посадке в таких условиях может быть недостаток запаса управления. Если же вертолет будет зависать у вертикальной стены на расстоянии, равном радиусу винта, часть диска, расположенная ближе к стене, будет создавать меньшую силу, в этом месте будет пониженное давление, вертолет будет стремиться к снижению и будет притягиваться к стене.
При висении над травяным покровом, толщина которого значительно меньше толщины веерной части струи (0,2 диаметра винта), эффект воздушной подушки увеличивается за счет большего торможения потока в травяном слое. При висении над кустарником, высота которого больше веерной части струи, или над кронами деревьев, проявляется еще так называемый «эффект сетки» (при исследовании под винтом протягивалась сетка различной плотности перпендикулярно потоку). Сущность этого эффекта заключается в том, что на границе сетки появляется вихревое кольцо, интенсивность которого растет с увеличением частоты сетки, что приводит к уменьшению тяги винта. На этом основании делается вывод, что при висении над кустарником или лесом любой частоты воздушная подушка отсутствует.
Всякого рода растительность оказывает еще более отрицательное влияние на эффект воздушной подушки, когда она образует конфигурации, аналогичные «ямам», «стенкам» (лесные поляны малого диаметра, окруженные плотным кустарником или плотными кронами деревьев).
При висении над водной поверхностью эффект воздушной подушки ниже чем при висении над грунтом. Объясняется это меньшим торможением потока по поверхности воды по сравнению с грунтом, образованием воронки над водной поверхностью, вследствие чего происходит «заброс» некоторой массы воздуха в область над винтом.
Вертолет Ми-8 балансируется на режиме висения с правым креном 2,5° при симметричном расположении грузов в кабине по поперечной оси и с положительным углом тангажа в зависимости от центровки: при предельно передней центровке угол тангажа минимальный и составляет 0,5°, при предельно задней — максимальный — 7°.
У вертолета Ми-8 на режиме висения рычаги управления занимают такое же положение, как и у вертолета Ми-4. Ручка циклического шага отклонена назад от нейтрального положения;и вправо, правая педаль отклонена вперед.
Ввиду отсутствия у вертолета Ми-8 указателей положения триммеров, окончательно центровка на висении проверяется по положению ручки циклического шага в продольном направлении. Если ручка на висении отклонена назад на ¼ полного хо-
да от нейтрального положения, то центровка вертолета нормальная, но близка к предельно задней.
Если ручка на висении отклонена назад на ½ полного хода от нейтрального положения, то центровка вертолета также нормальная, но близка к предельно передней. Вправо ручка отклонена в среднем на ¼ полного хода от нейтрального положения независимо от продольной центровки вертолета *. Для дальнейшего улучшения вертолетов на приборной доске будет устанавливаться прибор — визуальный указатель положения ручки, циклического шага, по которому пилоту будет удобно определять запасы управления не только на висении, но и при любом другом режиме полета.
Висение, как правило, осуществляется с включенными каналами «крен—тангаж» и «направление» автопилота и с правой коррекцией, при которой работает система автоматического поддержания постоянных оборотов несущего винта. При необходимости маневрирования на режиме висения или перехода на взлет с висения включаются лишь два канала автопилота «крен—тангаж» одной общей кнопкой-лампочкой.
Как показали летные испытания, вертолет висит с освобожденными рычагами управления при включенных всех четырех каналах автопилота, лишь незначительно перемещаясь с малой скоростью и изменяя высоту с незначительной вертикальной скоростью.
При висении в неспокойной атмосфере на (вертолет будет действовать перегрузка больше единицы, которая определяется по следующей формуле:
пэ=\ ± Д/гэ,
где Длэ — приращение перегрузки за счет вертикального порыва ветра. При порыве ветра вверх знак берется положительным, при порыве вниз — отрицательным. Приращение перегрузки от порыва воздуха на висении зависит от плотности воздуха, характера изменения коэффициента подъемной силы от углов атаки, скорости вертикального порыва, коэффициента заполнения несущего винта, градиента нарастания скорости порыва, удельной нагрузки на ометаемую площадь, оборотов несущего винта, приращения индуктивной скорости в плоскости вращения и определяется по системе уравнений, которая здесь не приводится. Так, например, при вертикальном порыве ветра снизу вверх силой 15 м/с перегрузка вертолета Ми-8 будет около 2. Эта Дерегрузка меньше максимально допустимой в эксплуатации — эксплуатационной перегрузки, которая составляет пэ = 3. Коэффициент безопасности для вертолета Ми-8 принят /»=1,65. При умеренном пилотировании на режиме висения перегрузки возникают незначительные.
 1 Загрузку и центровку см. гл. X. 108
1 Загрузку и центровку см. гл. X. 108
На вертолете Ми-8 на режиме висения разрешается маневрирование, но с определенными ограничениями для обеспечения безопасности.
2. Схема сил и моментов, действующих на вертолет
На режиме висения на вертолет действуют следующие силы и моменты (рис. 47): аэродинамическая сила несущего винта К, тяга рулевого винта Гр. в., сопротивление фюзеляжа X за счет обдувки его индуктивным потоком, подъемная сила стабилизатора Уст за счет обдувки его индуктивным потоком, вес вертолета О, реактивный момент несущего винта Мр.н.в, путевой, поперечный и реактивный моменты рулевого винта, продольный и поперечный моменты втулки за счет разноса горизонтальных шарниров (Мг.вт и Мх.вт) и поперечный момент боковой силы Гг„ Конус вращения и аэродинамическая сила несущего винта /? отклонены вправо ручкой циклического шага. Аэродинамическая сила Я раскладывается на составляющие Ту и Тг по осям вертолета. Тяга рулевого винта направлена влево и на плече до центра тяжести вертолета (/р.в) создает путевой момент, направленный в сторону, противоположную действию реактивного момента несущего винта. Сила сопротивления фюзеляжа X направлена вниз и составляет для любого одновинтового вертолета около 1,5% от полетного веса. Подъемная сила стабилизатора создает кабрирующий момент; по величине она незначительна и в практике ею пренебрегают, хотя момент, создаваемый этой силой, учитывают. Момент реактивный рулевого винта направлен в сторону, противоположную его вращению, и создает кабрирующий момент. Продольный момент втулки за счет разноса горизонтальных шарниров вызывает кабрирование, так как чаще всего на режиме висения конус незначительно завален назад. Поперечный момент втулки за счет разноса горизонтальных шарниров направлен вправо, в сторону завала конуса вращения, создает вертолету правый крен у. При наличии (Правого крена сила веса О может быть разложена на составляющие Оу и Сг по осям вертолета.
Для балансировки вертолета на установившемся висении должно быть соблюдено следующее соотношение между силами и моментами, действующими на вертолет. Тяга Ту должна уравновешивать составляющую веса 6У и сопротивление фюзеляжа для сохранения постоянства высоты висения: ТУ=ОУ+Х. Тяга рулевого винта должна уравновешиваться боковой силой Тг и составляющей веса Ог для отсутствия боковых перемещений вертолета:
Продольные силы на режиме висения отсутствуют, поэтом) вертолет не перемещается в продольном направлении. Для со
хранения направления висения реактивный момент несущего винта и путевой момент боковой силы должны уравновешиваться путевым моментом рулевого винта:
Сумма всех продольных моментов должна быть равна нулю для соблюдения продольного равновесия. Так как расстояние от втулок несущего и рулевого винтов до центра тяжести вертолета по вертикальной оси почти равны, то и поперечные момен-
Вид А
| Рис. 47. Схема сил и моментов, действующих на вертолет Ми-8 на висении и вертикальных режимах полета
|
ты рулевого винта и боковой силы Тх также почти равны, но ввиду того, что вправо действует еще и момент втулки за счет разноса горизонтальных шарниров, вертолет будет балансироваться в поперечном направлении с правым креном около 2,5°. Только при правом крене сумма всех поперечных моментов будет равна нулю, поперечные силы также будут уравновешены, и вертолет будет висеть без перемещений.
3. Особенности пилотирования и маневрирования на режиме
Висения
Перед выполнением (висения, как и перед выполнением любого другого режима полета, экипаж определяет взлетные, но-
минальные, крейсерские максимально допустимые обороты турбокомпрессоров на данный полет в зависимости от температуры окружающего (воздуха по специальному графику (см. рис. 30). - Перед вертикальным отрывом для висения плавно вводится рукоятка корректора газа полностью вправо. При этом обороты несущего винта должны быть 95±2%. Включаются каналы крена и тангажа автопилота нажатием кнопки-лампочки. Плавным движением ручки общего шага вверх вертолет отделяется от земли и набирает заданную высоту висения. Увеличение общего шага должно быть плавным с таким темпом, чтобы номинальный режим был получен за время не менее 10 с, а взлетный — 15 с. Такой темп увеличения мощности объясняется недостаточной приемистостью двигателей, ввиду определенной характеристики дроссельного пакета НР-40ВР. При таком темпе движения ручки общего шага обороты компрессоров будут увеличиваться, а обороты несущего винта будут сохраняться в пределах 95+2%. При более высоком темпе отклонения ручки общего шага обороты несущего винта будут уменьшаться. Минимально допустимые обороты винта 89%.
Если висение будет осуществляться на взлетном режиме, то при переходе к этому режиму даже с очень малым темпом выбора ручки общего шага вверх, обороты несущего винта уменьшаются. При достижении взлетных оборотов турбокомпрессора, полученных по графику (см. рис. 30), и оборотов несущего винта 92—93% создастся взлетный режим силовой установки, тяга винта будет максимальная, при этом вертолет будет висеть на потолке висения. При дальнейшем движении ручки общего шага вверх наступит перетяжеление несущего винта, обороты будут уменьшаться, тяга винта уменьшится, вертолет будет снижаться.
При отрыве от земли вертолет стремится перемещаться вперед и влево, а также развернуться влево, необходимо его балансировать соответствующим движением ручки управления на себя и вправо и отклонением правой педали вперед.
Снятие нагрузок с рычагов управления в момент отрыва не рекомендуется, так как при этом вертолет раскачивается. Снимать усилия частично необходимо перед отрывом, а затем после отрыва частыми и короткими нажатиями на кнопку.
На вертолете Ми-8 при отделении от земли, вертикальном наборе высоты, при висении, вертикальном снижении и вертикальном приземлении для правильного определения пространственного положения рекомендуется направлять взгляд на землю параллельно продольной оси вертолета вперед на 10—15 м.
Для зависания на заданной высоте необходимо уменьшить общий шаг и зафиксировать высоту. После зависания снимается нагрузка со всех рычагов управления.
Вертолет Ми-8, как и Ми-4, на висении удерживается при помощи всех рычагов управления: по высоте'—ручкой общего
шага, по направлению — педалями, по месту висения — ручкой циклического шага.
При включенных каналах тангажа и крена автопилота они работают на режиме стабилизации, и вертолет балансируется по крену и тангажу самостоятельно без вмешательства пилота с точностью до ±0,5°. Ручка циклического шага будет неподвижна. При этом вертолет, особенно при неспокойной атмосфере, будет изменять угол тангажа и крена и перемешаться, пилот вмешивается в управление и удерживает вертолет в нужном положении. В этом случае указанные каналы автопилота работают на режиме управления. Чтобы автопилот не парировал действия пилота, на вертолете установлены компенсационные датчики, механически связанные с продольным и поперечным управлением. Компенсационные датчики, введенные в схему автопилота, дают возможность управлять вертолетом в продольном и поперечном направлениях, не выключая каналы тангажа и крена, дают большую эффективность управления в начальный момент действия ручкой циклического шага и освобождают пилота от необходимости двойного действия ею для установления желаемого положения вертолета.
При включенном канале направления (в режиме стабилизации) на режиме висения в спокойной атмосфере вертолет удерживается автопилотом по курсу с точностью ±1°. При необходимости пилот вмешивается в путевое управление путем нажатия педалей, при этом канал направления автопилота отключается концевыми выключателями, установленными на педалях. При снятии ног с педалей канал направления самостоятельно зключается.
Нормальная работа автопилота на режиме висения, как и на любом другом режиме полета, характеризуется небольшими колебаниями стрелок каналов индикатора около нейтрального положения. Если ноги пилота лежат на педалях, канал направления находится в режиме согласования и стрелка Н находится в нейтральном положении. Если стрелка тангажа или крена (Т или К) находится вблизи упора, ее необходимо поставить в нейтральное положение путем перемещения ручки центровки на пульте управления или путем выключения и повторного включения автопилота. При необходимости висения на заснеженных вертодромах и площадках необходимо перед выполнением висения установить винту обороты 95+2% для раздувания снега и проработать на этом режиме до появления видимости 'впереди и в стороны на 10—15 м. Само висение осуществлять только против ветра.
Маневрирование вертолетом Ми-8 на режиме висения по высоте, направлению и месту висения осуществляется как и на вертолете Ми-4. Методика маневрирования и поведение вертолета такие же, как и вертолета Ми-4, лишь с несколько другими летными ограничениями.
При выполнении висения на взлетном режиме работы двигателей или близко к нему, когда обороты несущего винта близки к нижнему пределу 92—93%, требуется повышенное отклонение правой педали для уравновешивания реактивного момента, особенно на высокогорных вертодромах. При определенных условиях могут быть случаи недостаточного отклонения правой педали. Для получения запаса отклонения правой педали необходимо иметь регулировку хвостового винта с максимальным шагом, а несущего винта с оборотами на взлетном режиме не ниже 93%.
Боковой ветер отрицательно влияет на характеристики путевого управления при выполнении висения и особенно при разворотах на месте. Так, например, на взлетном режиме работы двигателей при наличии рулевого винта с максимальном шагом 18°13/ при скорости ветра около 8 м/с запас путевого управления позволяет развернуться вправо не более чем на 90° к направ,; лению ветра. При выполнении левого разворота при том же вет^ ре вертолет вначале нормально реагирует на отклонение левой педали, а затем после разворота на 60—70° у вертолета появляется стремление к самостоятельному увеличению угловой скорости вращения. Для парирования этого разворота недостаточно даже полного отклонения правой педали. При увеличении скорости ветра более 8 м/с угол возможного поворота вертолета вправо уменьшается (меньше 90°), а самопроизвольное увеличение угловой скорости при левом развороте уже парировать невозможно, так как правая педаль явно станет на упоре. Это и явилось одной из причин необходимости изменения максимального шага хвостового винта до 21° + 30'.
4. Летные ограничения на режиме висения и маневрировании
1. Ограничения по высоте висения. Висение допускается без всяких ограничений на высотах до 10 м, с 10 до 200 м только в случаях полета с грузом на внешней подвеске, при выполнении спасательных работ, экстренной медицинской помощи и пръ взлетах и посадках с вертодромов второго типа или площадок, им соответствующих. При отказе двигателей на высотах 10— 200 м безопасная посадка на режиме авторотации не обеспечивается. Но, так как двигатели ТВ2-117А надежные в работе, то висение на указанных высотах разрешается, особенно при явной необходимости. На (высотах более 200 м вертолет должен иметь скорость по прибору не менее минимально допустимой в горизонтальном полете на данной высоте, так как вертолет не сна