

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...
Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Топ:
Устройство и оснащение процедурного кабинета: Решающая роль в обеспечении правильного лечения пациентов отводится процедурной медсестре...
Генеалогическое древо Султанов Османской империи: Османские правители, вначале, будучи еще бейлербеями Анатолии, женились на дочерях византийских императоров...
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного хозяйства...
Интересное:
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Принципы управления денежными потоками: одним из методов контроля за состоянием денежной наличности является...
Распространение рака на другие отдаленные от желудка органы: Характерных симптомов рака желудка не существует. Выраженные симптомы появляются, когда опухоль...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Содержание
Радиолокация. 3
Наблюдение и обнаружение целей. 5
Глазомерная оценка радиолокационной ситуации. 5
Радиолокационная прокладка. 6
Построение треугольника скоростей.. 7
Маневр расхождения курсом.. 8
Маневр расхождения скоростью... 8
Рассмотрение ситуации сближения в истинном движении. 10
Расчет на маневренном планшете маневра расхождения с несколькими целями одновременно.. 10
Некомпетентность судоводителей в процессах сближения и расхождения судов - одна из причин столкновений.. 12
Список литературы: 15
Радиолокация
Действие радиолокационных станций (РЛС) основано на использовании явления отражения радиоволн от различных препятствий, расположенных на пути их распространения, т. е. в радиолокации для определения положения объектов используется явление эха. Для этого в РЛС имеется передатчик, приемник, специальное антенно-волноводное устройство и индикатор с экраном для визуального наблюдения эхо-сигналов. Таким образом, работу радиолокационной станции можно представить так: передатчик РЛС генерирует высокочастотные колебания определенной формы, которые посылаются в пространство узким лучом, непрерывно вращающимся по горизонту. Отраженные колебания от любого предмета в виде эхо-сигнала принимаются приемником и изображаются на экране индикатора, при этом имеется возможность немедленно определять на экране направление (пеленг) на объект и его расстояние от судна.

Рис 1. – Терминал радиолокационного комплекса Brige Master E
Пеленг на объект определяется по направлению узкого радиолокационного луча, который в данный момент падает на объект и отражается от него.
Расстояние до объекта может быть получено путем измерения малых промежутков времени между посылкой зондирующего импульса и моментом приема отраженного импульса, при условии, что радиоимпульсы распрастраняются со скоростью с = 3 Х 108 м/сек. Судовые РЛС имеют индикаторы кругового обзора (ИКО), на экране которого образуется изобр ажение окружающей судно навигационной обстановки.
|
|

Рис 2. – Сканер радиолокационного комплекса Brige Master E
Широкое распространение нашли береговые РЛС, устанавливаемые в портах, на подходах к ним и на каналах или на сложных фарватерах. С их помощью стало возможным осуществлять ввод судов в порт, руководить движением судов по фарватеру, каналу в условиях плохой видимости, в результате чего значительно снижается простой судов. Эти станции в некоторых портах дополняют специальной телевизионной передающей аппаратурой, которая передает изображение с экрана радиолокационной станции на подходящие к порту суда. Передаваемые изображения принимаются на судне обычным телевизионным приемником, что в значительной степени облегчает судоводителю задачу ввода судна в порт при плохой видимости.
Обработка радиолокационной информации включает определенную последовательность действий:
· наблюдение и обнаружение целей;
· глазомерную оценку опасности радиолокационной ситуации сближения и отбор целей для радиолокационной прокладки;
· радиолокационную прокладку — определение элементов движения цели и параметров ситуации сближения;
· расчет маневра расхождения;
· контроль за изменением радиолокационной ситуацией во время маневра до полного расхождения судов.
Наблюдение и обнаружение целей.
Использование РЛС наиболее эффективно, если радиолокационное наблюдение ведется постоянно. В открытом море постоянное наблюдение следует вести на шкалах среднего масштаба 8—16 миль с периодическим просмотром обстановки на шкалах как более мелкого, так и более крупного масштабов. В стесненных водах постоянное наблюдение обычно ведется на шкалах крупного масштаба с периодическим обзором обстановки на мелкомасштабных шкалах.
|
|
Глазомерная оценка радиолокационной ситуации.
Глазомерная оценка является обязательным этапом обработки радиолокационной информации и позволяет при большом количестве целей отобрать для прокладки опасные и потенциально опасные цели. Глазомерная оценка производится по следу послесвечения, который остается на экране РЛС за эхо-сигналом цели и представляет собой предыдущую траекторию относительного сближения судов. Мысленным продолжением следа послесвечения за эхо-сигналом цели получается линия относительного сближения (ЛОД), по которой определяют дистанцию кратчайшего сближения Дкр.
Глазомерную оценку опасности столкновения можно использовать только тогда, когда судоводитель понимает принцип построения треугольника скоростей, т.е. имеет достаточный навык работы на маневренном планшете.
При глазомерной оценке радиолокационной ситуации для выделения потенциально опасных целей, которые становятся опасными при маневре собственного судна и цели, чрезвычайно важно четко представлять направление разворота ЛОД, которое происходит в результате этих маневров.
Все возможные схемы перемещения эхо-сигналов охватывают следующие три начальных ситуации.
1 Эхо-сигнал перемещается параллельно курсовой черте нашего судна — это может быть встречное судно, обгоняемое судно, обгоняющее судно или неподвижная цель:
¨ при изменении скорости одного или обоих судов параллельность перемещения эхо-сигнала сохраняется;
¨ при изменении курса нашего судна ЛОД разворачивается в сторону, противоположную стороне разворота;
¨ разворот ЛОД (следа послесвечения), если наше судно не маневрировало, указывает на изменение курса цели в сторону разворота;
¨ эхо-сигнал неподвижной цели всегда перемещается параллельно линии курса нашего судна.
2 Эхо-сигнал перемещается не параллельно курсовой черте:
¨ через начало развертки — существует опасность столкновения;
¨ через курсовую линию нашего судна — цель пересекает наш курс;
¨ по линии, проходящей по корме нашего судна, — наше судно пересечет или уже пересекло курс цели:
¨ при изменении направления или скорости перемещения эхосигнала, если наше судно не маневрировало, глазомерно нельзя сделать однозначного вывода о виде маневра цели. Вид маневра можно установить только с помощью радиолокационной прокладки;
|
|
¨ разворот нашего судна в сторону эхо-сигнала цели приводит к развороту ЛОД от кормы к носу нашего судна;
¨ уменьшение скорости нашего судна приводит к развороту ЛОД от кормы к носу нашего судна;
¨ увеличение скорости нашего судна приводит к развороту ЛОД от носа к корме нашего судна;
¨ отворот нашего судна от эхо-сигнала не позволяет глазомерно оценить эффективность этого маневра (уменьшается относительная скорость сближения, увеличивается tкр и в результате может произойти резкое изменение направления ЛОД, определяемое только при радиолокационной прокладке).
3 Эхо-сигнал не перемещается — судно-сателлит:
¨ появление следа послесвечения параллельно курсовой черте — изменение скорости одного или обоих судов;
¨ изменение курсов одного или обоих судов вызывает появление следа послесвечения, не параллельного курсовой черте.
Радиолокационная прокладка.
Относительная прокладка — выполняется на маневренном планшете путем построения векторного треугольника скоростей. С использованием относительной прокладки легко можно определить элементы движения цели и параметры ситуации сближения. Поэтому она является основным методом, используемым на практике.
Главное, что интересует судоводителя при обнаружении объекта на экране радиолокатора - насколько опасна наблюдаемая цель.
Степень опасности оценивается по двум критериям:
Ø Дкр - дистанция кратчайшего сближения - минимальное расстояние, на которое цель может приблизиться к нашему судну, если никто не будет изменять элементы своего движения (курс и скорость);
Ø tкр - интервал времени до точки кратчайшего сближения - интервал времени от момента получения последней точки цели, на основании которой строится линия относительного движения ЛОД, до момента приближения цели на кратчайшее расстояние к нашему судну.
Чем меньше Дкр, тем более опасной является приближающаяся цель. Но нельзя оценивать степень опасности только по дистанции кратчайшего сближения. Не менее важными факторами являются скорость сближения и запас времени, которым располагает судоводитель, чтобы предпринять маневр и разойтись на безопасном расстоянии. Так ситуация обгона, как правило, менее опасна чем расхождение на встречных (пересекающихся) курсах, даже если Дкр в первом случае меньше, чем во втором.
|
|
Маневр расхождения курсом
1. Необходимо на ЛОД нанести упреждающую точку У положения цели в момент начала нашего маневра. Обычно это 3-х минутный интервал (расстояние А1 – А2).
2. Из этой точки У проводим касательную к окружности, величина которой соответствует заданной дистанции расхождения (здесь 3 мили).
3. Полученную прямую ожидаемой линии относительного движения ОЛОД переносим параллельно самой себе в точку А3.
4. Вектор нашего судна Vн при помощи циркуля разворачиваем до тех пор, пока он не пересечется с ОЛОД.
5. Полученный вектор Vн2 переносим в центр планшета и определяем новый курс нашего судна, который необходим для расхождения с целью на расстоянии в 3 мили.
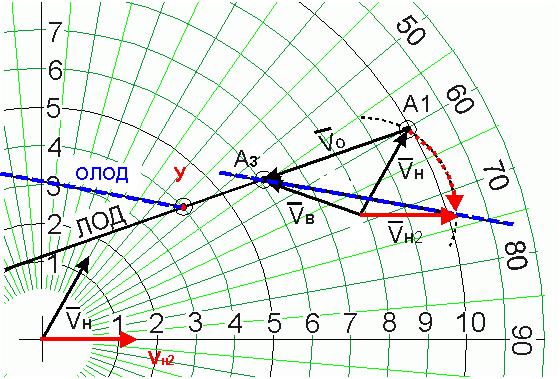
Рис. 13.15. Расчет маневра курсом
Содержание
Радиолокация. 3
Наблюдение и обнаружение целей. 5
Глазомерная оценка радиолокационной ситуации. 5
Радиолокационная прокладка. 6
Построение треугольника скоростей.. 7
Маневр расхождения курсом.. 8
Маневр расхождения скоростью... 8
Рассмотрение ситуации сближения в истинном движении. 10
Расчет на маневренном планшете маневра расхождения с несколькими целями одновременно.. 10
Некомпетентность судоводителей в процессах сближения и расхождения судов - одна из причин столкновений.. 12
Список литературы: 15
Радиолокация
Действие радиолокационных станций (РЛС) основано на использовании явления отражения радиоволн от различных препятствий, расположенных на пути их распространения, т. е. в радиолокации для определения положения объектов используется явление эха. Для этого в РЛС имеется передатчик, приемник, специальное антенно-волноводное устройство и индикатор с экраном для визуального наблюдения эхо-сигналов. Таким образом, работу радиолокационной станции можно представить так: передатчик РЛС генерирует высокочастотные колебания определенной формы, которые посылаются в пространство узким лучом, непрерывно вращающимся по горизонту. Отраженные колебания от любого предмета в виде эхо-сигнала принимаются приемником и изображаются на экране индикатора, при этом имеется возможность немедленно определять на экране направление (пеленг) на объект и его расстояние от судна.
Рис 1. – Терминал радиолокационного комплекса Brige Master E
Пеленг на объект определяется по направлению узкого радиолокационного луча, который в данный момент падает на объект и отражается от него.
|
|
Расстояние до объекта может быть получено путем измерения малых промежутков времени между посылкой зондирующего импульса и моментом приема отраженного импульса, при условии, что радиоимпульсы распрастраняются со скоростью с = 3 Х 108 м/сек. Судовые РЛС имеют индикаторы кругового обзора (ИКО), на экране которого образуется изобр ажение окружающей судно навигационной обстановки.
Рис 2. – Сканер радиолокационного комплекса Brige Master E
Широкое распространение нашли береговые РЛС, устанавливаемые в портах, на подходах к ним и на каналах или на сложных фарватерах. С их помощью стало возможным осуществлять ввод судов в порт, руководить движением судов по фарватеру, каналу в условиях плохой видимости, в результате чего значительно снижается простой судов. Эти станции в некоторых портах дополняют специальной телевизионной передающей аппаратурой, которая передает изображение с экрана радиолокационной станции на подходящие к порту суда. Передаваемые изображения принимаются на судне обычным телевизионным приемником, что в значительной степени облегчает судоводителю задачу ввода судна в порт при плохой видимости.
Обработка радиолокационной информации включает определенную последовательность действий:
· наблюдение и обнаружение целей;
· глазомерную оценку опасности радиолокационной ситуации сближения и отбор целей для радиолокационной прокладки;
· радиолокационную прокладку — определение элементов движения цели и параметров ситуации сближения;
· расчет маневра расхождения;
· контроль за изменением радиолокационной ситуацией во время маневра до полного расхождения судов.
Наблюдение и обнаружение целей.
Использование РЛС наиболее эффективно, если радиолокационное наблюдение ведется постоянно. В открытом море постоянное наблюдение следует вести на шкалах среднего масштаба 8—16 миль с периодическим просмотром обстановки на шкалах как более мелкого, так и более крупного масштабов. В стесненных водах постоянное наблюдение обычно ведется на шкалах крупного масштаба с периодическим обзором обстановки на мелкомасштабных шкалах.
Глазомерная оценка радиолокационной ситуации.
Глазомерная оценка является обязательным этапом обработки радиолокационной информации и позволяет при большом количестве целей отобрать для прокладки опасные и потенциально опасные цели. Глазомерная оценка производится по следу послесвечения, который остается на экране РЛС за эхо-сигналом цели и представляет собой предыдущую траекторию относительного сближения судов. Мысленным продолжением следа послесвечения за эхо-сигналом цели получается линия относительного сближения (ЛОД), по которой определяют дистанцию кратчайшего сближения Дкр.
Глазомерную оценку опасности столкновения можно использовать только тогда, когда судоводитель понимает принцип построения треугольника скоростей, т.е. имеет достаточный навык работы на маневренном планшете.
При глазомерной оценке радиолокационной ситуации для выделения потенциально опасных целей, которые становятся опасными при маневре собственного судна и цели, чрезвычайно важно четко представлять направление разворота ЛОД, которое происходит в результате этих маневров.
Все возможные схемы перемещения эхо-сигналов охватывают следующие три начальных ситуации.
1 Эхо-сигнал перемещается параллельно курсовой черте нашего судна — это может быть встречное судно, обгоняемое судно, обгоняющее судно или неподвижная цель:
¨ при изменении скорости одного или обоих судов параллельность перемещения эхо-сигнала сохраняется;
¨ при изменении курса нашего судна ЛОД разворачивается в сторону, противоположную стороне разворота;
¨ разворот ЛОД (следа послесвечения), если наше судно не маневрировало, указывает на изменение курса цели в сторону разворота;
¨ эхо-сигнал неподвижной цели всегда перемещается параллельно линии курса нашего судна.
2 Эхо-сигнал перемещается не параллельно курсовой черте:
¨ через начало развертки — существует опасность столкновения;
¨ через курсовую линию нашего судна — цель пересекает наш курс;
¨ по линии, проходящей по корме нашего судна, — наше судно пересечет или уже пересекло курс цели:
¨ при изменении направления или скорости перемещения эхосигнала, если наше судно не маневрировало, глазомерно нельзя сделать однозначного вывода о виде маневра цели. Вид маневра можно установить только с помощью радиолокационной прокладки;
¨ разворот нашего судна в сторону эхо-сигнала цели приводит к развороту ЛОД от кормы к носу нашего судна;
¨ уменьшение скорости нашего судна приводит к развороту ЛОД от кормы к носу нашего судна;
¨ увеличение скорости нашего судна приводит к развороту ЛОД от носа к корме нашего судна;
¨ отворот нашего судна от эхо-сигнала не позволяет глазомерно оценить эффективность этого маневра (уменьшается относительная скорость сближения, увеличивается tкр и в результате может произойти резкое изменение направления ЛОД, определяемое только при радиолокационной прокладке).
3 Эхо-сигнал не перемещается — судно-сателлит:
¨ появление следа послесвечения параллельно курсовой черте — изменение скорости одного или обоих судов;
¨ изменение курсов одного или обоих судов вызывает появление следа послесвечения, не параллельного курсовой черте.
Радиолокационная прокладка.
Относительная прокладка — выполняется на маневренном планшете путем построения векторного треугольника скоростей. С использованием относительной прокладки легко можно определить элементы движения цели и параметры ситуации сближения. Поэтому она является основным методом, используемым на практике.
Главное, что интересует судоводителя при обнаружении объекта на экране радиолокатора - насколько опасна наблюдаемая цель.
Степень опасности оценивается по двум критериям:
Ø Дкр - дистанция кратчайшего сближения - минимальное расстояние, на которое цель может приблизиться к нашему судну, если никто не будет изменять элементы своего движения (курс и скорость);
Ø tкр - интервал времени до точки кратчайшего сближения - интервал времени от момента получения последней точки цели, на основании которой строится линия относительного движения ЛОД, до момента приближения цели на кратчайшее расстояние к нашему судну.
Чем меньше Дкр, тем более опасной является приближающаяся цель. Но нельзя оценивать степень опасности только по дистанции кратчайшего сближения. Не менее важными факторами являются скорость сближения и запас времени, которым располагает судоводитель, чтобы предпринять маневр и разойтись на безопасном расстоянии. Так ситуация обгона, как правило, менее опасна чем расхождение на встречных (пересекающихся) курсах, даже если Дкр в первом случае меньше, чем во втором.
Построение треугольника скоростей
Суть относительной прокладки заключается в том, что за центр системы координат мы принимаем наше судно, которое помещаем в центр планшета, а цели наносим на планшет в соответствующие точки по пеленгу и дистанции, измеренных при помощи РЛС.
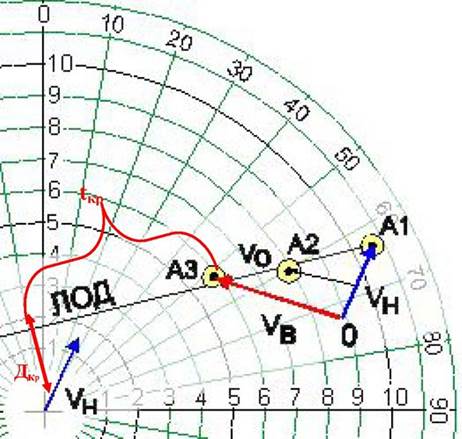
Рис. 13.14. Построение треугольника скоростей
Пошаговые действия для оценки ситуации:
1. в центр планшета наносится вектор скорости нашего судна, равный 6-ти минутному отрезку (например, скорость нашего судна 15 узлов, откладываем по курсу 1, 5 мили);
2. делаются замеры пеленга и дистанции встречного судна;
3. в таблицу записываются данные измерения и на планшет наносится первая точка – А1;
4. в полученную точку параллельно переносится и " втыкается " вектор скорости нашего судна;
5. через 3 минуты повторяются пункты 2-3, наносится вторая точка А2. Приближенно оценивается ситуация сближения;
6. еще через 3 минуты повторяются пункты 2-3, наносится третья точка А3;
7. соединив точки А1 – А2 – А3, получаем линию относительного движения – ЛОД;
8. из начала нашего вектора скорости строим вектор Vв, который является вектором истинной скорости и курса встречного судна;
9. перпендикуляр, проведенный из центра планшета к ЛОД определяет Дкр (в нашем случае Дкр = 1,7 мили). Величину tкр находим, откладывая по ЛОД отрезки, равные V0 до Дкр (здесь, примерно, укладывается 1,5 V0, т.е. tкр = 1,5 х 6 мин = 9 мин);
10. принимается решение по выбору маневра расхождения.
Маневр расхождения курсом
1. Необходимо на ЛОД нанести упреждающую точку У положения цели в момент начала нашего маневра. Обычно это 3-х минутный интервал (расстояние А1 – А2).
2. Из этой точки У проводим касательную к окружности, величина которой соответствует заданной дистанции расхождения (здесь 3 мили).
3. Полученную прямую ожидаемой линии относительного движения ОЛОД переносим параллельно самой себе в точку А3.
4. Вектор нашего судна Vн при помощи циркуля разворачиваем до тех пор, пока он не пересечется с ОЛОД.
5. Полученный вектор Vн2 переносим в центр планшета и определяем новый курс нашего судна, который необходим для расхождения с целью на расстоянии в 3 мили.
Рис. 13.15. Расчет маневра курсом
|
|
|

Особенности сооружения опор в сложных условиях: Сооружение ВЛ в районах с суровыми климатическими и тяжелыми геологическими условиями...

Биохимия спиртового брожения: Основу технологии получения пива составляет спиртовое брожение, - при котором сахар превращается...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!