

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...
Топ:
Выпускная квалификационная работа: Основная часть ВКР, как правило, состоит из двух-трех глав, каждая из которых, в свою очередь...
Проблема типологии научных революций: Глобальные научные революции и типы научной рациональности...
Эволюция кровеносной системы позвоночных животных: Биологическая эволюция – необратимый процесс исторического развития живой природы...
Интересное:
Что нужно делать при лейкемии: Прежде всего, необходимо выяснить, не страдаете ли вы каким-либо душевным недугом...
Распространение рака на другие отдаленные от желудка органы: Характерных симптомов рака желудка не существует. Выраженные симптомы появляются, когда опухоль...
Национальное богатство страны и его составляющие: для оценки элементов национального богатства используются...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Число оборотов водила  аналитически определяется с использованием основной формулы дифференциального механизма:
аналитически определяется с использованием основной формулы дифференциального механизма:
 (2.1)
(2.1)
где:  - передаточное отношение механизма в обращенном движении (при неподвижном водиле Н;
- передаточное отношение механизма в обращенном движении (при неподвижном водиле Н;
n 2 – число оборотов зубчатого колеса 2, определяется из соотношения  ;
;
n 4  - число оборотов зубчатого колеса 4, дано.
- число оборотов зубчатого колеса 4, дано.
Число оборотов водила , передаточные отношения  и
и  графическим методом определяется путем построения планов скоростей (треугольников скоростей по методу Смирнова [4]).
графическим методом определяется путем построения планов скоростей (треугольников скоростей по методу Смирнова [4]).
Для построения планов скоростей необходимо построить кинематическую схему механизма в масштабе  , определив радиусы делительных окружностей зубчатых колес
, определив радиусы делительных окружностей зубчатых колес  . В выбранном произвольном масштабе
. В выбранном произвольном масштабе  построить треугольники распределения линейных скоростей звеньев в системе координат r0V.
построить треугольники распределения линейных скоростей звеньев в системе координат r0V.
Пример: определить число оборотов водила Н дифференциального механизма аналитическим и графическим методами
| Числа зубьев | Z1 | 12 |
| Z2 | 34 | |
| Z2' | 28 | |
| Z3 | 24 | |
| Z4 | 76 | |
| Модуль в мм | m1 -3 | 5 |
| Число об/мин | n1 | 160 |
| n4 | -60 | |
| Числа зубьев | Zн | 32 |
| Z5 | 36 |
Определим число оборотов водила аналитически. Запишем основную формулу дифференциального механизма:
где  - передаточное отношение механизма в обращенном движении (при неподвижном водиле Н);
- передаточное отношение механизма в обращенном движении (при неподвижном водиле Н);
n 2 – число оборотов зубчатого колеса 2, определим из соотношения

Выразим число оборотов водила из основной формулы дифференциального механизма:

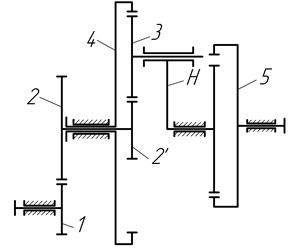
Определим число оборотов водила графически. Построим кинематическую схему механизма в масштабе (рис.1.4), предварительно определив радиусы делительных окружностей зубчатых колес:
 ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  .
.
Определим окружные скорости в зацеплениях A и D:
|
|


Выберем масштабный коэффициент плана скоростей  , тогда длины векторов, изображающих соответствующие скорости определятся:
, тогда длины векторов, изображающих соответствующие скорости определятся:
 ;
;  ;
;

Рис. 1.4
В произвольно выбранной системе координат rOV построим треугольники распределения линейных скоростей звеньев (рис.1.2). На ось ординат проецируем неподвижные оси зубчатых колес – точки 
Из точки а с ординатой r 1 отложим отрезок  , из точки d с ординатой r 4 отложим отрезок
, из точки d с ординатой r 4 отложим отрезок  . Через точки
. Через точки  и
и  проводим прямую, которая является линией распределения скоростей для точек звена
проводим прямую, которая является линией распределения скоростей для точек звена  , лежащих на оси
, лежащих на оси  . На эту линию проецируем точку В и получаем вектор
. На эту линию проецируем точку В и получаем вектор  , изображающий в масштабе
, изображающий в масштабе  окружную скорость в зацеплении В.
окружную скорость в зацеплении В.
Соединяем точки  и
и  и проецируем на эту линию точку С, так как ее скорость зависит от скоростей звеньев и 4. Вектор
и проецируем на эту линию точку С, так как ее скорость зависит от скоростей звеньев и 4. Вектор  изображает скорость VC в масштабе . Отрезок
изображает скорость VC в масштабе . Отрезок  является линией распределения угловых скоростей водила Н.
является линией распределения угловых скоростей водила Н.


При определении передаточного отношения планетарного механизма аналитическим методом следует иметь в виду, что общее передаточное отношение представляется в виде произведений передаточных отношений отдельных ступеней и планетарного механизма:
 (2.2)
(2.2)
где  - передаточные отношения, взятые со своими знаками, зацеплений зубчатых колес 1 и 2; Н и 5;
- передаточные отношения, взятые со своими знаками, зацеплений зубчатых колес 1 и 2; Н и 5;
 - передаточное отношение планетарного механизма.
- передаточное отношение планетарного механизма.
Пример: определить передаточное отношение планетарного механизма аналитическим и графическим методами. Исходные данные те же.
Общее передаточное отношение представим в виде произведений передаточных отношений отдельных ступеней и планетарного механизма:
 ,
,
где  ,
,  - передаточные отношения зацеплений зубчатых колес 1 и 2; Н и 5;
- передаточные отношения зацеплений зубчатых колес 1 и 2; Н и 5;
 - передаточное отношение планетарного механизма.
- передаточное отношение планетарного механизма.
Передаточное отношение планетарной передачи

Определим передаточное отношение  графически. Построим кинематическую схему механизма (рис. 1.5) в том же масштабе, что и дифференциальный механизм. Выберем масштабный коэффициент плана скоростей
графически. Построим кинематическую схему механизма (рис. 1.5) в том же масштабе, что и дифференциальный механизм. Выберем масштабный коэффициент плана скоростей  , тогда длина вектора, изображающего скорость в зацеплении А определится:
, тогда длина вектора, изображающего скорость в зацеплении А определится:  .
.
|
|
Рис. 1.5
В произвольно выбранной системе координат rOV построим треугольники распределения линейных скоростей звеньев (рис 1.2). На ось ординат проецируем неподвижные оси зубчатых колес – точки  и точку d с ординатой r 4.
и точку d с ординатой r 4.
Из точки а с ординатой r 1 отложим отрезок  . Через конец этого отрезка и начало координат т.
. Через конец этого отрезка и начало координат т.  , которая определит распределение скоростей для точек звена 1, лежащих на оси r 1.
, которая определит распределение скоростей для точек звена 1, лежащих на оси r 1.
Через точки и  проводим прямую, которая является линией распределения скоростей для точек звена , лежащих на оси
проводим прямую, которая является линией распределения скоростей для точек звена , лежащих на оси  . На эту линию проецируем точку В и получаем вектор
. На эту линию проецируем точку В и получаем вектор  , изображающий в масштабе окружную скорость в зацеплении В. Соединяем точки и и проецируем на эту линию точку С. Получаем вектор , изображающий скорость VC в масштабе .
, изображающий в масштабе окружную скорость в зацеплении В. Соединяем точки и и проецируем на эту линию точку С. Получаем вектор , изображающий скорость VC в масштабе .
Через точки  и
и  проводим линию, проецируем на нее точку Е и получаем вектор
проводим линию, проецируем на нее точку Е и получаем вектор  , изображающий в масштабе окружную скорость зацепления Е. Через конец этого отрезка и начало координат т.
, изображающий в масштабе окружную скорость зацепления Е. Через конец этого отрезка и начало координат т.  проведем прямую, которая определит распределение скоростей для точек звена 5, лежащих на оси r 5.
проведем прямую, которая определит распределение скоростей для точек звена 5, лежащих на оси r 5.
Передаточное отношение планетарного механизма, определенное по данным графическим построениям, определится

Передаточное отношение трехступенчатой зубчатой передачи (при закрепленном водиле) определяется по формуле:
 , (2.3)
, (2.3)
где k – число внешних зацеплений.
Пример: определить передаточное отношение трехступенчатой зубчатой передачи графически и аналитически. Исходные данные те же.
Закрепим водило Н и определим передаточное отношение i 14 трехступенчатой зубчатой передачи аналитически:

Определим передаточное отношение i 14 графически. Построим кинематическую схему механизма в том же масштабе (рис. 1.6), что и предыдущие схемы.
Выберем масштабный коэффициент плана скоростей , тогда длина вектора, изображающего скорость в зацеплении А определится:
.
В произвольно выбранной системе координат rOV построим треугольники распределения линейных скоростей звеньев (рис. 2.4). На ось ординат проецируем неподвижные оси зубчатых колес - точки  и точку с ординатой
и точку с ординатой  .
.
Из точки а с ординатой r 1 отложим отрезок . Через конец этого отрезка и начало координат т. проведем прямую, которая определит распределение скоростей для точек звена 1, лежащих на оси r 1.
|
|
Рис. 1.6
Через точки и проводим прямую, которая является линией распределения скоростей для точек звена , лежащих на оси  . На эту линию проецируем точку В и получаем вектор , изображающий в масштабе окружную скорость в зацеплении В. Соединяем точки и с и проецируем на эту линию точку D. Получим вектор , изображающий скорость VD в масштабе . Через конец этого отрезка и начало координат т.
. На эту линию проецируем точку В и получаем вектор , изображающий в масштабе окружную скорость в зацеплении В. Соединяем точки и с и проецируем на эту линию точку D. Получим вектор , изображающий скорость VD в масштабе . Через конец этого отрезка и начало координат т.  проведем прямую, которая определит распределение скоростей для точек звена 4, лежащих на оси r 4.
проведем прямую, которая определит распределение скоростей для точек звена 4, лежащих на оси r 4.
Передаточное отношение трехступенчатой зубчатой передачи, определенное по данным графическим построениям, определится

Контрольные вопросы
1. Задачи структурного анализа рычажных механизмов с низшими кинематическими парами.
2. Подвижность механизма. Формула Чебышева для определения подвижности плоского механизма.
3. Первичный механизм и группы Ассура. Класс и порядок механизма.
4. Задачи кинематического анализа механизма. Кинематические характеристики и передаточные функции (аналоги скоростей и ускорений) механизма.
5. Кинематический анализ рычажных механизмов методом планов положений.
6. Кинематический анализ рычажных механизмов методом векторных уравнений и их графическое решение в форме планов скоростей и ускорений.
7. Динамические параметры механизма.
8. Силы, действующие в механизмах и их классификация.
9. Силы в кинематических парах без учета трения.
10. Инерционная нагрузка звеньев механизма.
11. Задачи, метод и последовательность кинетостатического анализа.
12. Кинетостатический расчет графоаналитическим методом планов сил.
13. Уравновешивающий момент и его расчет по Жуковскому Н.Е.
14. Динамический синтез кулачкового механизма с роликовым коромыслом - определение минимального радиуса кулачка, радиуса ролика и межосевого расстояния.
15. Динамический синтез кулачкового механизма с плоским толкателем - определение минимального радиуса кулачка и радиуса тарелки.
|
|
16. Зубчатые передачи и их назначение. Передаточное отношение простой зубчатой передачи.
17. Основная теорема зацепления.
18. Свойства эвольвентного зацепления.
19. Геометрические параметры эвольвентного зубчатого колеса.
20. Изготовление зубчатых колес методом огибания. Станочное зацепление.
21. Подрезание и заострение зубьев колеса, наименьшее число зубьев.
22. Линия зацепления, дуга зацепления, рабочий участок профиля зубьев.
23. Коэффициент торцевого перекрытия.
24. Коэффициент относительного скольжения.
25. Коэффициент удельного давления.
26. Передаточное отношение многозвенного зубчатого механизма.
27. Планетарные и дифференциальные зубчатые механизмы.
28. Аналитический метод определения передаточного отношения планетарных и дифференциальных механизмов.
29. Графический метод определения передаточного отношения трехступенчатого редуктора, планетарного и дифференциального механизмов.
Литература
1. Артоболевский И.И. Теория механизмов и машин. М.: Наука, 1988. 638 с.
2. Артоболевский И.И., Эдельштейн Б.В. Сборник задач по теории механизмов и машин. М.: Наука, 1975. - 358 с.
3. Курсовое проектирование по теории механизмов и машин /Кореняко А.С. и др./ под ред. А.С. Кореняко. Изд. 5-е.: Киев:«Вища школа», 1970.- 330 с.
4. Смелягин А.И. Теория механизмов и машин. Курсовое проектирование: учебное пособие.-М.: Инфра-М, 2009 – 260 с.
5. Теория механизмов и машин: Учебник для втузов /К.В. Фролов, С.А. Попов, А.К. Мусатов и др. / Под ред. К.В. Фролова. Изд. 5-е М.: Высш.шк., 2005.- 496 с.
Приложение 1
Значения инволюты угла
|
| Значения | |||||

| 
| 
| 
| 
| 
| |

| 0749 | 0773 | 0798 | 0823 | 0849 | 0875 |

| 0902 | 0929 | 0958 | 0986 | 1015 | 1045 |

| 1076 | 1107 | 1138 | 1170 | 1203 | 1227 |

| 1271 | 1306 | 1341 | 1377 | 1414 | 1452 |

| 1490 | 1529 | 1568 | 1609 | 1650 | 1692 |

| 1734 | 1777 | 1821 | 1866 | 1912 | 1958 |

| 2005 | 2053 | 2101 | 2151 | 2201 | 2252 |

| 2304 | 2357 | 2411 | 2466 | 2521 | 2577 |

| 2635 | 2693 | 2752 | 2812 | 2872 | 2931 |

| 2997 | 3061 | 3126 | 3191 | 3258 | 3326 |

| 3394 | 3463 | 3535 | 3606 | 3679 | 3753 |

| 3828 | 3904 | 3981 | 4060 | 4139 | 4220 |

| 4301 | 4384 | 4468 | 4553 | 4640 | 4727 |

| 4816 | 4906 | 4997 | 5090 | 5183 | 5278 |

| 5375 | 5472 | 5571 | 5672 | 5773 | 5876 |

| 5980 | 6086 | 6183 | 6302 | 6412 | 6523 |
Примечание. Все значения углов с * умножить на 10-5.
Приложение 2
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РЕСПУБЛИКИ ТАТАРСТАН
АЛЬМЕТЬЕВСКИЙ ГОСУДАРСТВЕННЫЙ НЕФТЯНОЙ ИНСТИТУТ
КАФЕДРА ПРИКЛАДНОЙ МЕХАНИКИ
КУРСОВАЯ РАБОТА
По теории механизмов и маши
|
|
|

Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...

Своеобразие русской архитектуры: Основной материал – дерево – быстрота постройки, но недолговечность и необходимость деления...

Наброски и зарисовки растений, плодов, цветов: Освоить конструктивное построение структуры дерева через зарисовки отдельных деревьев, группы деревьев...

Опора деревянной одностоечной и способы укрепление угловых опор: Опоры ВЛ - конструкции, предназначенные для поддерживания проводов на необходимой высоте над землей, водой...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!

