Основным достоинством ПТП по сравнению с другими видами тормозных приводов является легкость управления торможением большегрузного автомобиля или автомобильного поезда. Объясняется это тем, что приведение в действие тормозных механизмов осуществляется энергией двигателя, аккумулированной в сжатом воздуха, а водитель затрачивает мускульную энергию лишь на управление воздухораспределительным аппаратами» Многие воздухораспределительные аппараты выполняются следящими, автоматически устанавливающими связь между управляющим сигналом, (приводной силой) и выходным давлением сжатого воздуха.
Непосредственную связь между приводной силой и давлением воздуха в следящем аппарате выполняет следящий механизм, состоящий из чувствительного элемента (ЧЭ) - диафрагмы или поршня, а также впускного и выпускного клапанов и их сёдел. В следящий аппарат, кроме того, входят детали, приводящие его в действие. В тормозном кране это рычажная система и пружина хода, в других аппаратах это приводной поршень и другие детали.
По характеру изменения давления воздуха в зависимости от приводной силы следящие механизмы делятся на две группы: прямого и обратного действия. Первые изменяют давление воздуха прямо пропорционально приводной' силе, а вторые - обратно пропорционально. Впускной и выпускной клапаны в следящих механизмах или жестко соединяются между собой или выполняются в виде одной детали. Сёдла впускных клапанов обычно делаются неподвижными, а сёдла выпускных - за одно целое с ЧЭ.
В следящем механизме прямого действия, показанном на рис.1, а ЧЭ служит резинно-тканевая круглая диафрагма 3, закрепленная наружным краем в корпусе 2. Резиновые впускной 6 и выпускной 4 клапаны жёстко связаны стержнем 8. Пружина 7 прижимает впускной клапан к неподвижному седлу 5, выполненному на перегородке корпуса. Подвижное седло 9 выпускного клапана закреплено в центральной части диафрагмы.
Следящий механизм автоматически устанавливает давление воздуха в полости регулирования "Б" прямо пропорционально приводной силе Q шт. Равновесие сил, действующих на диафрагму слева и справа - равновесное положение, - достигается при закрытом состоянии обоих клапанов и постоянном положении ЧЭ, Когда следящий механизм рассматриваемой схемы используется в тормозном кране, тогда в следящий аппарат включается пружина I хода. При увеличении приводной силы Q шт, передающейся от тормозной педали на шток 10, и неизменном положении седла 9, пружина 1 сжимается. Этим пружина I при неизменной положении ЧЭ тормозного крана обеспечивает ход педали тормозной системы. Но рассмотренной схеме выполнен одинарный тормозной кран ЗИЛ.
В поршневом следящем механизме прямого действия, показанном на рис.1,б, имеется один клапан 3, осуществляющий Функции впуска и выпуска сжатого воздуха. Неподвижное седло 2,также как и в первом механизме, выполнено на перегородке корпуса 5,а подвижное седло 4 в ЧЭ - поршне I. Когда следящий механизм используется в тормозном кране, тогда он дополняется пружиной хода 6. По такой схеме выполнены тормозной кран автомобиля МАЗ (нижняя секция) и тормозной кран автомобиля КамАЗ. В последнем пружина хода - резиновая втулка.
В следящем механизме прямого действия поршневого типа (рис.1,в) впускной 5 и выпускной 2 резиновые клапаны смонтированы на цилиндрической направляющей 4, перемещающейся в корпусе 7, что центрирует клапаны при их посадке на сёдла и этим обеспечивает высокую герметичность. Седло 3 впускного клапана 5 сделано на перегородке корпуса, а седло 6 выпускного клапана 2 - на поршне I. Приводная сила Q шт создается на поршне I вследствие изменения давления воздуха в полости управления У. По рассмотренной схеме выполнен ускорительный клапан и воздухораспределитель прицепа КамАЗ»
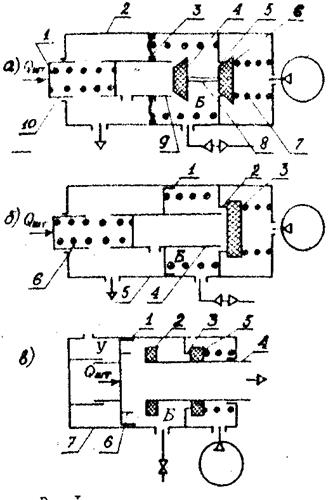
Рис. 1
Особенностью конструкции следящего механизма обратного действия является наличие уравновешивающей дружины I (рис.2,а). Максимальное давление воздуха в полости регулирования "Б" зависит от натяга уравновешивающей пружины, который обычно регулируется. Увеличение приводной силы Q шт сопровождается понижением давления воздуха в полости "Б" при постоянной силе сжатия уравновешивающей пружины. Для перемещения органа управления при изменении силы Q шт механизм имеет пружину хода 2. По рассмотренной схеме выполнены секции, управляющие торможением прицепов, комбинированных тормозных кранов автомобилей МАЗ, КрАЗ. Диафрагменный следящий механизм обратного действия автомобилей ЗИЛ работает в принципе аналогичным образом.
Впускное седло 3(рис.2,6) следящего механизма обратного действия другой конструкции выполнено на поршне 2, на который воздействует уравновешивающая пружина I. Резиновый клапан 4, осуществляющий впуск воздуха в полость регулирования "Б" и выпуск из неё, сделан за одно целое с направляющей 5, перемещающейся в корпусе 6. Выпускное седло 7 имеет шток 8, к которому прикладывается приводная сила Q шт. Особенность работы такого следящего механизма заключается в том, что при регулировании давления воздуха в полости Б вследствие изменения приводной силы Q шт, равновесное положение поршня достигается при различном сжатии уравновешивающей пружины. Перемещение седла 7 при этом обеспечивается пружиной хода 9. По рассмотренной схеме выполнен следящий механизм ручного крана стояночной тормозной систем» автомобиля КамАЗ.
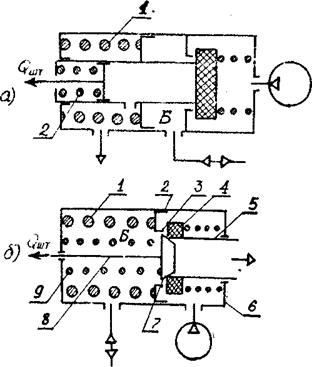
Рис. 2






