

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

Особенности сооружения опор в сложных условиях: Сооружение ВЛ в районах с суровыми климатическими и тяжелыми геологическими условиями...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Особенности сооружения опор в сложных условиях: Сооружение ВЛ в районах с суровыми климатическими и тяжелыми геологическими условиями...
Топ:
Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов...
История развития методов оптимизации: теорема Куна-Таккера, метод Лагранжа, роль выпуклости в оптимизации...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Интересное:
Распространение рака на другие отдаленные от желудка органы: Характерных симптомов рака желудка не существует. Выраженные симптомы появляются, когда опухоль...
Влияние предпринимательской среды на эффективное функционирование предприятия: Предпринимательская среда – это совокупность внешних и внутренних факторов, оказывающих влияние на функционирование фирмы...
Средства для ингаляционного наркоза: Наркоз наступает в результате вдыхания (ингаляции) средств, которое осуществляют или с помощью маски...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
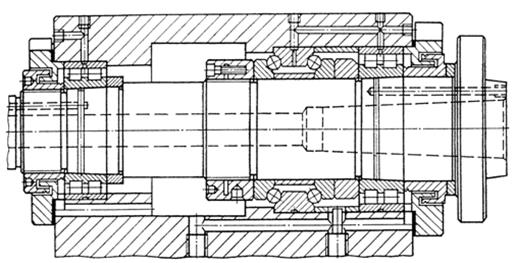
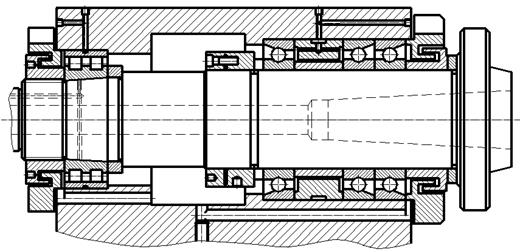
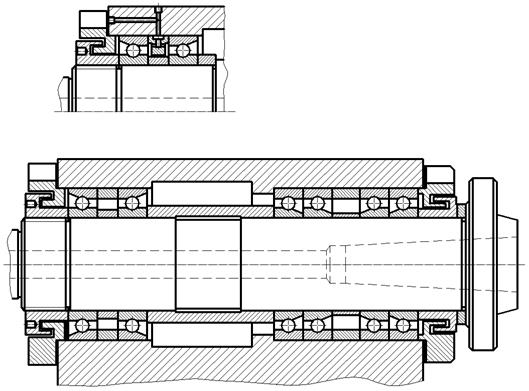
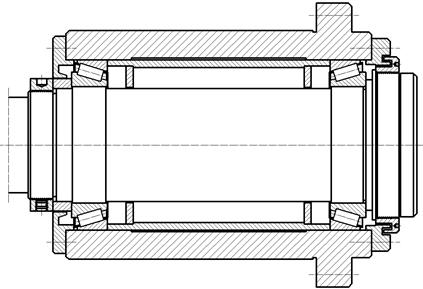
| Компоновка шпиндельного узла | Подшипники в опорах | d, мм | dn ∙105, мм∙мин-1 | ξ | Область применения | |
| передняя | задняя | |||||
| Рис. 2.25, а | 3182100 178800 | 3182100 | 60…200 | 2,5…4,0 | 0,3…0,45 | токарные, фрезерные, многоцелевые |
| Рис. 2.25, б | 697000 | 17000 | 60…200 | 2,0…2,5 | 0,3…0,45 | токарные, фрезерные |
| Рис. 2.25, в | 67000 | 17000 | 40…160 | 2,5…3,0 | 0,25…0,3 | токарные, фрезерные, шлифовальные |
| Рис. 2.25, г | 46000К | 36000К | 20…100 | 6,0…11,0 | 0,1…0,2 | отделочно-расточные |
| Рис. 2.25, д | 46000К | 3182100 | 30…120 | 4,0…6,0 | 0,15…0,25 | токарные, фрезерные, многоцелевые |
| Рис. 2.25, е | 46000К | 36000К | 60…140 | 4,0…6,0 | 0,15…0,25 | шлифовальные, многоцелевые |
| Рис. 2.25, ж | 67000 | 67000 | 40…160 | 2,5…3,0 | 0,25…0,3 | токарные, фрезерные, шлифовальные |
| Рис. 2.25, з | 36000К | 36000К | 20…80 | 8,0…12,0 | 0,1…0,2 | отделочные станки |
| Рис. 2.25, и | 36000К | 36000К | 20…80 | 10…18 | 0,1 | отделочные станки |
| Примечания: 1. Обозначения: d – диаметр шейки шпинделя под передней опорой; n – частота вращения шпинделя, мин-1; ξ – коэффициент защемления вала в передней опоре. 2. Первое число параметра dn характеризует предельную быстроходность при смазке подшипников пластичным материалом, второе – жидким материалом или масляным туманом. | ||||||
|
| а) |

|
| б) |

|
| в) |

|
| г) |
|
| д) |
|
| е) |
|
| ж) |
|
| з) |
|
| и) |
Рис. 2.25 Типовые схемы компоновок шпиндельных узлов
Наибольший диаметр шпинделя D можно принять по основному размеру станка, связь между которыми получена на основании статистических данных и приведена далее [11]:
Токарные станки:
| Наибольший диаметр обработки, мм…………………. | 125 | 160 | 200 | 250 | 315 | 400 | 500 |
| Максимальный диаметр шпинделя D, мм, рис. 2.26…. | 92 | 108 | 133 | 165 | 210 | 280 | 380 |
Фрезерные станки:
| Ширина стола, мм………………. | 100…125 | 160…200 | 250…320 | 400…500 | 630…800 |
| Номер конуса под инструмент…. | 30 | 40 | 40 (50) | 40, 50 (55) | 55 (60) |
| Максимальный диаметр шпинделя D, мм, рис. 2.26……… | 69,839 | 88,882 | (128,57) | (152,4) | (221,44) |
|
|
Рис. 2.26. Схема шпиндельного узла
Диаметр шейки шпинделя под передней опорой d устанавливается по передаваемой приводом мощности. Для токарных, фрезерных, расточных и многоцелевых станков существует математическая зависимость [7]: N/ d = 0,15…0,35 кВт/мм.
В исходных данных на проектирование привода численное значение мощности N и максимальная частота вращения шпинделя n max обычно заданы, поэтому численное значение параметра d легко вычисляется, а по характеристике быстроходности dn производится выбор конкретной схемы компоновки шпиндельного узла. Если известна компоновочная схема шпиндельного узла, то параметр быстроходности позволяет вычислить наибольшее допустимое значение диаметра d = (dn ТАБЛ/ n ШП max).
Передние концы шпинделей стандартизованы для разных групп станков. Для станков токарной группы параметры передних концов шпинделей приведены в табл. П31, а для фрезерных, расточных станков и многоцелевых станков с ЧПУ в табл. П32 – табл. П35. Исполнения шпинделей с конусностью 7:24 применяются в станках с частотой вращения шпинделя до (10…12)∙103 мин-1, для шпинделей с большей частотой вращения используются конусы HSK (табл. П30).
Диаметр шпинделя в задней опоре принимается d 3 = (0,8…0,9) d. Ступенчатая наружная поверхность шпинделя между опорами принимается конструктивно таким образом, чтобы обеспечить свободную посадку всех подшипников, зубчатых колес (приводящих во вращение шпиндель), простановочных втулок и крепежных гаек. При этом диаметр наименьшей ступени вала между опорами должен быть не менее расчетного диаметра, определяемого по выражению:
 ,
,
где меньшее значение коэффициента в скобках принимается для станков нормальной точности, а большее – для прецизионных станков.
Диаметр сквозного отверстия d 0 (рис. 2.26) определяется с учетом размеров механизма зажима инструментальной оправки и механизма автоматического закрепления заготовки кулачками в токарном патроне.
|
|
Диаметр шпинделя d 1 принимается равным d 1 = (1,1…1,2) d. Вылет шпинделя а (рис. 2.26) задается конструктивно при прочерчивании шпиндельного узла с учетом параметров переднего конца для крепления инструментов или токарного патрона, размеров уплотнений под подшипники и ширины подшипника, воспринимающего радиальную нагрузку. Размер а должен быть как можно меньшим.
Расстояние между опорами l принимается предварительно равным l = 3 а (рекомендуется [7] в пределах l = (2,5…3,5) а) или l = (4…5) d, однако, в дальнейшем это расстояние может корректироваться при прочерчивании конструкции шпиндельного узла и последующего расчета на жесткость.
Технические расчеты на жесткость шпиндельного узла являются обязательными, поскольку позволяют выявить минимально допустимый диаметр под подшипник в передней опоре d при принятых параметрах l и а (по результатам вычерчивания конструкции и шпиндельного узла).
Расчет на жесткость предусматривает определение величины упругой деформации переднего конца шпинделя под действием сил резания и радиальных сил от элемента, передающего крутящий момент на шпиндель. Упругие перемещения шпинделя зависят от размеров вала-шпинделя, жесткости опор (подшипников) и схемы нагружения.
Допустимая величина смещения переднего конца шпинделя ГОСТами не регламентирована, поэтому на практике используются разные ограничительные характеристики. Допустимое радиальное перемещение шпинделя под действием нагрузки не должно превышать 1/3 допуска обработанной поверхности детали на станке [1] или 1/3 суммы допусков на обрабатываемые поверхности [7] или 1/3 допуска на биение конца шпинделя по нормам точности станка [8].
Другие авторы [18] предлагают оценивать основные параметры шпиндельного узла через жесткость, Н/мкм:
j = P /δ,
где P – радиальная составляющая силы резания, Н; δ – упругое смещение конца шпинделя по направлению действия силы, мкм.
Минимально допустимая радиальная жесткость шпинделя для большинства станков общего назначения принимается равной j = 250 Н/мкм, для прецизионных станков принимается j = 500 Н/мкм [23]. Современные тенденции развития металлообрабатывающих станков связаны с дальнейшим ростом требований к точности, а, следовательно, и повышением жесткости шпиндельных узлов. Допускаемая радиальная жесткость шпиндельного узла должна быть не менее j = (4…5) d Н/мкм, где диаметр d измеряется в миллиметрах [11]. При этом допустимый угол поворота оси шпинделя в передней опоре не превышает θ = 0,001…0,0015 рад.
|
|
На рис. 2.27 представлены основные расчетные схемы для шпиндельных узлов. Для схемы (рис. 2.27, а), в которой приводной элемент (зубчатое колесо), передающий крутящий момент на шпиндель, расположен между его опорами, формулы перемещения конца шпинделя δ (мм) и угла поворота от шпинделя в передней опоре θ (рад) выглядят следующим образом:

 ;
;
 .
.
Знак «плюс» перед Q принимается, если силы P и Q направлены в одну сторону, и знак «минус», если силы направлены в противоположные стороны.
Для схемы (рис. 2.27, б) в которой приводной элемент расположен на задней части шпинделя (шпиндель со шкивом):

 ;
;
 .
.
Формулы записаны для случая, когда силы P и Q направлены в одну сторону. Если сила Q направлена в другую сторону, то в формулах перед Q поставить следует знак «минус».
Для схемы (рис. 2.27, в), нагруженной только радиальной составляющей силы резания (шпиндель разгружен от сил приводного элемента), формулы имеют следующий вид:
 ;
;
 .
.

| 
| 
|
| а) | б) | в) |
Рис. 2.27. Расчетные схемы шпинделя
Во всех приведенных формулах приняты следующие обозначения:
l – расстояние между опорами А и В, мм; а – длина передней консольной части шпинделя, мм; b – расстояние от передней опоры шпинделя до приводного элемента, мм; с – длина консоли для приводного элемента, мм; ξ – коэффициент защемления вала шпинделя в передней опоре; Е – модуль упругости материала шпинделя, МПа; jA и jB – радиальные жесткости подшипников в передней А и задней В опорах шпинделя, Н/мм; J 1 и J 2 – усредненные моменты инерций сечения передней консольной части шпинделя и сечения в пролете между опорами соответственно, мм4.
Поперечное сечение шпинделя представляет собой кольцо, момент инерции которого вычисляется по формуле:
|
|
 ;
;  ,
,
где di и li – диаметры и длина наружных участков шпинделя на длине l; d 0– диаметр внутренней поверхности шпинделя.
Расположение сил P и Q в пространстве выясняется при вычерчивании конструкции коробки скоростей. Пользоваться расчетными формулами можно, если силы P и Q приведены в одну плоскость. Если расхождения плоскостей, в которых действуют силы, превышают 30º, расчет рекомендуется производить в двух плоскостях: в плоскости, проходящей через вектор силы резания P, и в плоскости перпендикулярной ему. Сила Q приводится к рассматриваемым плоскостям. Затем определяются результирующие прогибов конца шпинделя и углов поворота по формулам приведения:
 и
и  .
.
Сила резания P, действующая на передний конец шпинделя, определяется по формуле
 ,
,
где Р ОК – окружная сила (Н), производит основную работу резания, по которой определяется мощность привода главного движения, рассчитывается по нормативным данным режимов резания; Р Р – радиальная сила, изгибающая инструмент и шпиндель, принимается в долях численных значений окружной силы Р ОК (см. главу 3).
| 
|
| а) | в) |
| 
|
| б) | г) |
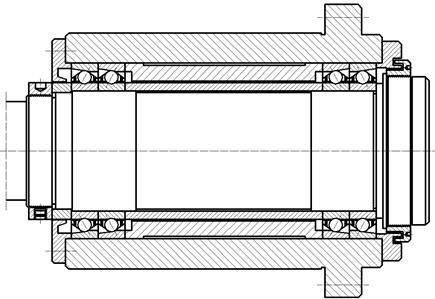
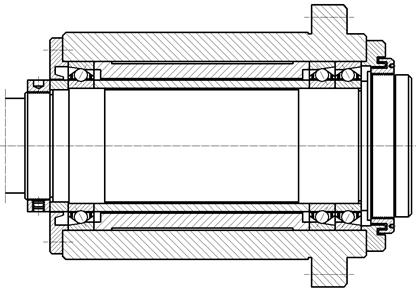
Рис. 2.28. Типовые шпиндельные опоры с радиально-упорными подшипниками
Жесткости опор качения шпиндельных узлов jA и jB определяются контактной жесткостью тел качения и кольцами подшипников. В каждой опоре шпиндельного узла может находиться от одного до четырех однотипных подшипников, поэтому расчет жесткости каждой многоподшипниковой опоры ведется по одной условной комплексной опоре, состоящей как бы из двух условных подшипников 1 и 2 (рис. 2.28). Такой подход относится к шпиндельным узлам с радиально-упорными подшипниками [24]. Число подшипников в опорах 1 и 2 обозначим i 1 и i 2 соответственно. Для опор на рис. 2.28, а и рис. 2.28, б, i 1= i 2= 1; для опор на рис. 2.28 в, i 1= 2, i 2= 1; для опор на рис. 2.28, г, i 1= i 2= 2.
Особенностью конструкции радиально-упорных подшипников является то обстоятельство, что они всегда имеют парную зеркальную установку и создание осевого натяга, численная величина которого задается силой натяга F Н или величиной осевого смещения (деформации) положения одной обоймы подшипника относительно другой обоймы ∆. При этом имеет место осевая и радиальная жесткости подшипников.
Для комплексных опор (см. рис. 2.28) осевая жесткость j 0 составляет:
 ;
;
 ,
,
где z и d Ш – число и диаметр шариков в подшипнике соответственно; α – угол контакта шариков в подшипнике, рекомендуется применять на 1…3º больше вследствие предварительного натяга; k 1 и k 2 – коэффициенты принимаются по табл. 2.26; F Н – сила предварительного натяга принимается по табл. 2.27.
|
|
Таблица 2.26
Значения коэффициентов k 1, k 2, k 3 и осевой жесткости j 0 для комплексных опор
| Расположение подшипников | Значения коэффициентов | Осевая жесткость в относительных единицах | |||
| k 1 | k 2 | k 3 | при F Н = const | при ∆ = const | |
| i 1= 1; i 2= 1 (рис. 2.28, а, б) | 3 | 2,1 | 3 | 1 | 1 |
| i 1= 2; i 2= 1 (рис. 2.28, в) | 3,9 | 3,2 | 
| 1,3 | 1,5 |
| i 1= 1; i 2= 3 | 4,6 | 3,8 | 
| 1,55 | 1,8 |
| i 1= 2; i 2= 2 (рис. 2.28, г) | 4,8 | 4,2 | 3 | 1,6 | 2 |
| i 1= 3; i 2= 3 | 6,2 | 6,4 | 3 | 2,1 | 3 |
| Примечание. При i 1≠ i 2 значение k 3 принимается по верхней строке, если внешняя сила разгружает условный подшипник 1, и по нижней строке – когда сила разгружает условный подшипник 2. | |||||
Радиальная жесткость j P условной комплексной опоры принимается в долях от её осевой жесткости j 0. Для подшипников типов 36000К и 36000 радиальная жесткость вычисляется j Р = (5,3…6) j 0, а для подшипников типов 46000К и 46000 – j Р = (1,95…2,1) j 0.
Максимальная внешняя осевая нагрузка, при которой натяг в одном из условных подшипников комплексной опоры полностью снимается, вычисляется по зависимости F 0max = K3 F H.
Осевая жесткость двухрядного радиально-упорного подшипника с углом контакта 60º (по ГОСТ 20821) определяется по формуле:

 ,
,
где k = 0,8…0,9 – коэффициент, учитывающий погрешности изготовления.
Радиальная жесткость однорядного конического роликового подшипника, работающего с небольшим натягом, когда F 0/ F Р ≥ 2, определяется по выражению:
 ,
,
где l – длина ролика, мм; α – угол наклона оси роликов, град; F 0 – сила, действующая на подшипник по оси вала, Н.
Радиальная жесткость двухрядного конического подшипника возрастает в два раза по сравнению с однорядным.
Таблица 2.27
Предварительный натяг шариковых радиально-упорных подшипников, Н
| Номинальный диаметр отверстия подшипника | Серия подшипников | |||||||
| 36100 | 36200 | 46100 | 46200 | |||||
| Натяг | ||||||||
| легкий | средний | легкий | средний | легкий | средний | легкий | средний | |
| 25 | 50 | 150 | 80 | 240 | 80 | 240 | 130 | 390 |
| 30 | 80 | 240 | 115 | 350 | 130 | 390 | 190 | 570 |
| 35 | 90 | 270 | 130 | 390 | 150 | 450 | 210 | 630 |
| 40 | 100 | 300 | 180 | 540 | 160 | 480 | 290 | 870 |
| 45 | 120 | 360 | 200 | 600 | 200 | 600 | 320 | 960 |
| 50 | 130 | 390 | 230 | 690 | 210 | 630 | 360 | 1080 |
| 55 | 170 | 510 | 270 | 810 | 300 | 900 | 440 | 1320 |
| 60 | 180 | 540 | 320 | 960 | 310 | 930 | 510 | 1530 |
| 65 | 190 | 570 | 360 | 1080 | 320 | 960 | 590 | 1770 |
| 70 | 240 | 720 | 380 | 1140 | 390 | 1070 | 610 | 1830 |
| 75 | 240 | 720 | 400 | 1200 | 400 | 1200 | 640 | 1920 |
| 80 | 300 | 900 | 460 | 1380 | 490 | 1470 | 740 | 2220 |
| 85 | 310 | 930 | 520 | 1560 | 510 | 1530 | 850 | 2550 |
| 90 | 360 | 1080 | 620 | 1860 | 580 | 1740 | 1020 | 3060 |
| 95 | 400 | 1200 | 660 | 1980 | 640 | 1920 | 1100 | 3300 |
| 100 | 410 | 1230 | 790 | 2370 | 650 | 1950 | 1270 | 3810 |
| 105 | 450 | 1350 | 820 | 2460 | 730 | 2190 | 1350 | 4050 |
| 110 | 530 | 1590 | 860 | 2580 | 860 | 2580 | 1410 | 4230 |
| 120 | 550 | 1650 | 900 | 2700 | 890 | 2670 | 1450 | 4350 |
| 130 | – | 1140 | 3420 | 1700 | 5100 | |||
| 140 | 1150 | 3450 | 1800 | 5400 | ||||
| 150 | 1320 | 3960 | 1900 | 5700 | ||||
| 160 | 1450 | 4350 | 2000 | 6000 | ||||
| Примечание. Для прецизионных станков рекомендуется легкий натяг, для остальных станков – средний. | ||||||||
ЗУБЧАТЫЕ ПЕРЕДАЧИ
|
|
|

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Адаптации растений и животных к жизни в горах: Большое значение для жизни организмов в горах имеют степень расчленения, крутизна и экспозиционные различия склонов...

Двойное оплодотворение у цветковых растений: Оплодотворение - это процесс слияния мужской и женской половых клеток с образованием зиготы...

Таксономические единицы (категории) растений: Каждая система классификации состоит из определённых соподчиненных друг другу...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!