МЕХАНИЗМОВ
Цели анализа и необходимые сведения из кинематики
Плоского движения
1°. Кинематический анализ механизмов сводится к решению трех задач.
Задача о положениях, которая позволяет судить о том, какие положения занимают звенья механизма при том или ином положении ведущего звена. Посредством этой задачи, например, можно установить рабочий ход инструмента (строгальный станок), положение рабочего органа в холостом и рабочем положениях (шасси самолета — убранное и выпущенное), траекторию рабочего органа (подъемный кран, экскаватор) и т. д.
Задача о скоростях устанавливает зависимость скоростей ведомых точек механизма от скорости ведущего звена. Особенно важно установить отношение этих скоростей. Знание скорости и хода рабочего органа позволяет, например, находить время срабатывания механизма (время выпуска самолетного шасси, время срабатывания фотозатвора), определять отношение скоростей (передаточного отношения), что помогает правильно подбирать редукторы для машинных агрегатов. Кроме того, в нашем курсе передаточное отношение определяет характер передачи усилия от одной части механизма к другой и позволяет отыскивать приведенную массу механизма.
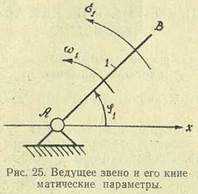
Задача об ускорениях непосредственно связана с нахождением инерционной нагрузки, которая в современных машинах может достигать значительной величины. Как это будет видно из последующего изложения, ускорения отдельных точек звеньев механизма зависят от квадрата угловой скорости ведущего звена, а эта скорость в некоторых объектах достигает десятков тысяч оборотов в минуту (в некоторых случаях даже сотен тысяч оборотов). Поскольку в механизмах движение ведомых звеньев определяется движением ведущего звена, то полезно указать, в какой форме это движение задается. Если ведущее звено входит в кинематическую пару со стойкой (рис. 25), то движение его можно задать различно: зависимостью его угловой координаты φ1 от времени t
 (6)
(6)
изменением его угловой скорости ω1 от времени t
 (7)
(7)
или изменением его углового ускорения ε1 от времени t
 (8)
(8)
При задании движения зависимостью (6) остальные (7 и 8) можно получить последовательным дифференцированием ее по времени. При задании зависимостями (7) или (8) остальные получаются соответствующими математическими операциями (дифференцированием или интегрированием).
Обычно считают, что ведущее звено вращается равномерно. Почему удобно задаваться так, будет видно из последующего изложения.
Из теоретической механики известно, что положение плоской фигуры вполне определяется положением двух ее точек. Поэтому задачи кинематического анализа будем считать решенными, если для каждого звена механизма будут известны: координаты, скорости и ускорения двух его точек. Эти же задачи тоже будут решенными, если для каждого звена механизма известны: координаты, скорость и ускорение одной его точки и угловая координата, угловая скорость и угловое ускорение самого звена.
2°. Прежде чем приступить к рассмотрению методов кинематического анализа, установим связь между кинематикой двух точек, принадлежащих разным звеньям и вошедших в одну и ту же кинематическую пару.
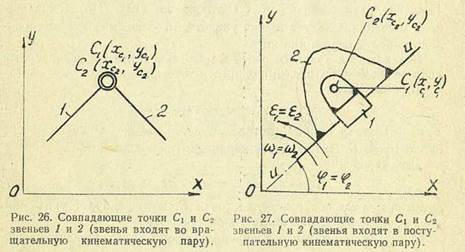
Звенья 1 и 2 (рис. 26) вошли во вращательную кинематическую пару. Центр цапфы С1 звена 1 движется как одно целое вместе е центром втулки С 2 звена 2. Поэтому координаты этих точек равны между собою:
 (9)
(9)
скорости и ускорения для них тоже одинаковы:

| (10)
(11)
|
Для этого случая не будем указывать, какому звену принадлежит точка С, а просто для центра любого шарнира его координаты, скорость и ускорение будут записываться так: хС, уС, vС, аС.
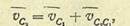
Звенья 1 и 2 вошли в поступательную кинематическую пару (рис. 27). На плоскости, принадлежащей звену 1, отмечена точка C 1, под ней, на плоскости звена 2, находится точка С2 (точки С 1и С 2— совмещенные точки). Угловые координаты, скорости и ускорения звеньев 1 и 2 будут одинаковыми:
 (12)
(12)
Координаты точек C 1 и С 2 также равны между собою:
 (13)
(13)
Между скоростями этих точек имеется такое соотношение:
 (14)
(14)
 С2С1 — относительная скорость точки С 2 относительно точки С 1, ее направление параллельно линии ии.
С2С1 — относительная скорость точки С 2 относительно точки С 1, ее направление параллельно линии ии.
Ускорения точек С 2 и С 1 связаны равенством:
 (15)
(15)
где  — ускорение Кориолиса в движении точки С 2 относительно точки С1, по модулю
— ускорение Кориолиса в движении точки С 2 относительно точки С1, по модулю  == 2 ω1υС2С1, а направление его можно определить, повернув вектор относительной скорости
== 2 ω1υС2С1, а направление его можно определить, повернув вектор относительной скорости  на 90° по направлению вращения звена 1;
на 90° по направлению вращения звена 1;
 —ускорение относительное (релятивное) точки С2 относительно точки С 1 оно направлено параллельно линии ии.
—ускорение относительное (релятивное) точки С2 относительно точки С 1 оно направлено параллельно линии ии.
Звенья 1 и 2 вошли в кинематическую пару четвертого класса (рис. 28). Для точек С 2 и С 1 соотношения (13) — (15) сохраняют свои значения. Следует только указать, что ускорение направлено параллельно линии ии.
В заключение укажем связь между скоростями и ускорениями двух точек В и С (рис. 29) одного и того же звена.
Для скоростей
 (16)
(16)
 — скорость точки С, которая будет у нее при вращении звена около точки В. Эта скорость перпендикулярна линии ВС.
— скорость точки С, которая будет у нее при вращении звена около точки В. Эта скорость перпендикулярна линии ВС.
Для ускорений
 (17)
(17)
здесь  — полное ускорение точки С, которое будет у нее при вращении звена около точки B;
— полное ускорение точки С, которое будет у нее при вращении звена около точки B;  — нормальное ускорение точки С при вращении звена около точки В, оно направлено параллельно линии ВС от точки С к точке В и по модулю
— нормальное ускорение точки С при вращении звена около точки В, оно направлено параллельно линии ВС от точки С к точке В и по модулю  =
=  ;
;
 — касательное ускорение точки С при вращении звена
— касательное ускорение точки С при вращении звена
около точки В, оно направлено перпендикулярно линии ВС, по модулю  = εlCB.
= εlCB.
Теперь рассмотрим методы кинематического анализа механизмов. Этих методов два: аналитический (численный) и графический.






