1˚. Плоские механизмы можно классифицировать по различным признакам. Поэтому для них имеется ряд классификаций. Назовем некоторые из них.
1. Разделение механизмов на механизмы с низшими парами и на механизмы с высшими и низшими парами.
2. Разделение по конструктивным признакам: шарнирно-рычажные, зубчатые, кулачковые, зубчато-рычажные и т. д.
3. По характеру воспроизводимого движения: передачи — механизмы для передачи и воспроизведения только вращательного движения и остальные (этому признаку не отвечающие).
В нашем курсе будем пользоваться в основном классификацией Ассура. Работа Петроградского профессора Л. В. Ассура относится к 1918 г. Она была продолжена в тридцатых годах академиков И. И. Артоболевским и получила свое окончательное завершение.
2°. По Ассуру — Артоболевскому класс механизма определяется строением его ведомой части. Механизмы, отнесенные к одной и той же категории (классу), имеют общие методы кинематического и силового анализов. В этом состоит ее рациональный смысл, кроме того, как это будет показано в дальнейшем, она позволяет правильно синтезировать новые механизмы.
По классификации Ассура — Артоболевского все механизмы образуются присоединением к системе определенного движения (ведущим звеньям и стойке) особых кинематических цепей, носящих название групп Ассура или структурных групп. Эти группы различаются своими классами: первому—присвоен номер два, последующие имеют номера три, четыре, пять и т. д. Класс механизма определяется наивысшим классом присоединенной группы. Методы кинематического и силового анализов усложняются с повышением класса механизма. В некоторых случаях удачным выбором ведущего звена класс механизма можно понизить.
Классифицировать механизмы по Ассуру — Артоболевскому можно, если соблюдены следующие условия:
1. Число ведущих звеньев равно степени подвижности механизма, это показывает, что мы имеем дело с кинематической цепью определенного движения.
2. Ведущее звено (ведущие звенья) входит в кинематическую пару пятого класса со стойкой.
3. В механизме имеются только кинематические пары пятого класса.
При наличии кинематических пар четвертого класса их следует предварительно заменить двумя парами пятого класса и одним звеном. Такая замена правомочна, так как в этом случае степень подвижности нового (заменяющего) механизма сохраняет свое значение, найденное для основного механизма, и кинематика звеньев заменяющего и основного механизмов остается одинаковой. Такая замена справедлива для трех бесконечно близких положений механизма, поэтому скорости и ускорения (первого порядка) в основном и заменяющем механизме совпадают.
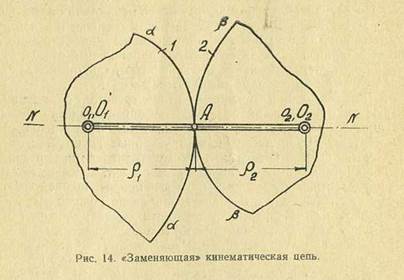
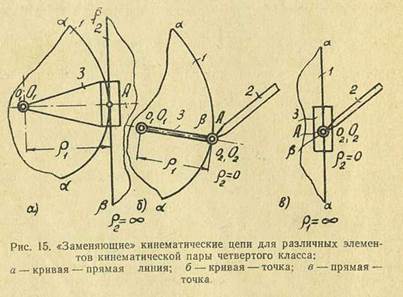
Замена пар четвертого класса осуществляется так (рис. 14). В точке А контакта элементов аа и ββ пары четвертого класса проводят нормаль NN. Отмечают на этой нормали положения центров кривизны o 1 и o 2 элементов аа и ββ. В точках o 1 и o 2 помещают вращательные кинематические пары O 1 и O 2 и соединяют их дополнительным звеном 3. На рис. 15, а показана замена для случая, когда элементом кинематической пары четвертого класса на звене 2 будет прямая на рис. 15,6 — кривая ββ, выродившаяся в точку β, а на рис. 15, в — замена для случая, когда элементами пары, будут прямая аа и точка β.
На рис. 16, а дана схема механизма указателя вертикальной Скорости самолета, а на рис. 16, б — схема этого же механизма после замены кинематических пар четвертого класса Е и G кине-
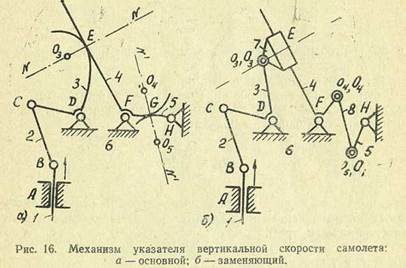
матическими парами пятого класса (О 3, Е, О4, О 5). Эта схема называется заменяющим механизмом. На рис. 17 изображена схема
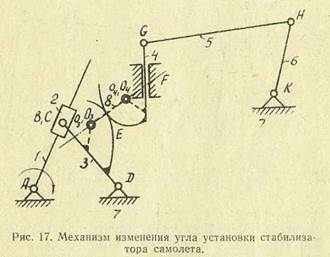
механизма угла установки стабилизатора самолета и заменяющая пару четвертого класса Е кинематическая цепь, состоящая из звена 8 и кинематических пар O 3 и O 4 (эта цепь показана пунктиром)
Во всяком механизме, при остановке его ведущего звена (звеньев), ведомая кинематическая цепь теряет свою подвижность и обращается в ферму. Степень ее подвижности
 (3)
(3)
где ω B —степень подвижности ведомой цепи механизма;
п В — число звеньев этой цепи;
p 5 В — число кинематических пар в ней же.
В формуле (3) нет числа кинематических пар четвертого класса, так как предполагается, что они заменены способом, указанным раньше. Из этой формулы получаем
 (4)
(4)
Откуда следует вывод: ведомая кинематическая цепь образуется четным числом звеньев и количеством кинематических пар пятого класса, кратным трем.
Рассмотрим, какие кинематические цепи можно образовать, удовлетворяющие условию (4).
Наименьшее положительное и целое четное число равно двум, поэтому (при п В = 2) p 5 В = 3. На рис. 18 показана такая цепь. Эта
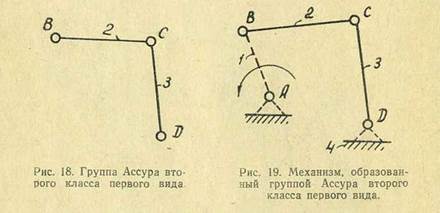
цепь называется группой Ассура (структурной группой) второго класса. В ней различают внешние кинематические пары В и D и внутреннюю — С. Посредством этой группы механизм образуется следующим образом. Элементами своих внешних кинематических пар В и D группа присоединяется к системе определенного движения, в нашем случае (рис. 19)— к ведущему звену 1 и стойке 4.
Группа второго класса может быть выполнена в пяти видах (рис. 20).

На рис. 21 приведены примеры механизмов, образованные группами второго класса различных видов. Ведущее звено 1 обозначено круговой стрелкой, а стойке присвоен номер 4.
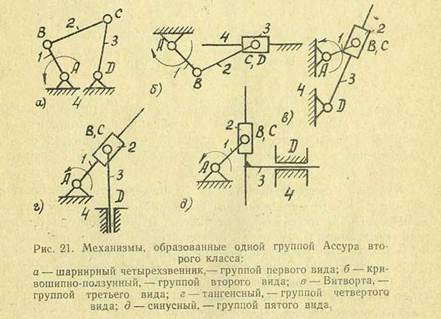
Четырехзвенный четырехшарнирный механизм изображен на рис. 21.
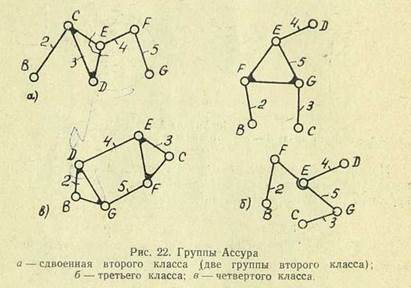
Если в формуле (4) положить пВ = 4, то р5В = 6. Кинематические цепи, удовлетворяющие этому условию, даны на рис. 22. Класс группы выше второго определяется числом внутренних кинематических пар основного замкнутого контура. Для группы третьего класса (рис. 22, б) это будут пары Е, F, G, а для группы четвертого класса (рис.. 22. в) — пары D, Е, Ft G.
Установим порядок структурного синтеза (проектирования) механизма. К ведущему звену и стойке присоединяется группа Ассура любого класса, а к полученному механизму (системе определенного движения) можно присоединить следующую группу и т. д.
Как видим, механизмы получаются последовательным присоединением к системе определенного движения особых кинематических цепей, носящих название групп Ассура. В этом заключается принцип наслоения. Само собой разумеется, что, задаваясь числом пВ = 6 и р 5 в = 9, получим либо строенную группу второго класса, либо усложненные группы третьего и четвертого классов, либо группу пятого класса. Обычно механизмы образуются группами второго класса, реже третьего, еще реже четвертого и, как исключение, пятого и более старших классов
Рассмотрим пример образования механизма двигателя дизель. К ведущему звену 1 и стойке 8 (рис. 23, а) присоединяется группа второго класса, второго вида, состоящая из звеньев 2 и 3 и кинематических пар В, С и D, далее к группе BCD и. стойке (рис. 23,.6) присоединяется группа второго класса, первого вида — звенья 4 и 5, кинематические пары Е, F, G, и, наконец, к звену 5 и стойке 8 (рис. 23, в) присоединяется группа второго класса, второго вида — звенья 6 и 7, пары H, К, L.
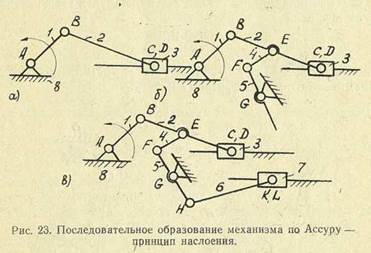
Порядок образования механизма может быть записан формулой строения
 (5)
(5)
где I — ведущее звено, 2 — номер класса группы, а числа в индексах — номера звеньев, образовавших ведущую систему и соответствующие группы.
Очевидно, что для определения класса механизма надо разделять его на группы в порядке, обратном его образованию. Это разделение надо вести так, чтобы после удаления очередной группы в остатке была бы система определенного движения, т. е. остаток был бы тоже механизмом.
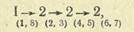
Пример. Дан механизм конхоидографа (рис. 24, а), требуется определить его степень подвижности ω и указать его класс.
Решение. Число всех звеньев k = 6, подвижных п = 5, кинематических пар пятого класса 7, пар четвертого класса нет.
Степень подвижности

Ведущее звено номер один, оно указано круговой стрелкой.
Разделяем механизм на группы Ассура. Пытаемся отделить группу второго класса. Это нам не удается, так как отделение любых двух звеньев, соединенных между собой кинематической парой, приводит к разрушению механизма. Приходится отсоединять четыре звена (т. е. группу более старшего класса), это будет вся ведомая кинематическая цепь, состоящая из звеньев 2, 3, 4 и 5 и пар В, F, Е, G, D и С. В этой группе пары Е, F, G будут внутренними, следовательно, мы отделили группу третьего класса. Больше отделять нечего: остались только ведущее звено 1 и стойка 8. Формула строения

Наивысший класс отделенной группы — третий, следовательно, механизм надо отнести к третьему классу.
На рис. 24, б в том же механизме за ведущее звено принято четвертое. Теперь можно от механизма отделить группу второго класса, не разрушая остатка, отделяется группа, образованная первым и вторым звеном и парами А, В и F — это группа второго класса первого вида. Далее отделяется группа, состоящая из третьего и пятого звеньев и пар Е, G, С — группа второго класса третьего вида.
Формула строения
Наивысший класс группы — второй, следовательно, механизм конхоидографа при ведущем звене 4 будет второго класса.
Из разобранного примера видно, что класс механизма не только определяется наивысшим классом присоединенной группы, но еще и зависит от того, какое звено принято за ведущее.
В заключение надо указать, что если в механизме будут кинематические пары четвертого класса, то прежде чём приступить к разделению его на группы Ассура, следует все эти пары заменить (каждую из них) одним звеном и двумя парами пятого класса.
В основном механизме нельзя ведущим звеном назначать звено, входящее в кинематическую пару четвертого класса со стойкой.
ЛЕКЦИЯ ТРЕТЬЯ





