Для ограничения пускового тока последовательно с тяговыми двигателями включают реостат, сопротивление которого снижают по мере разгона двигателя. При двух или более двигателях применяют группировку (рис. 19.8, а), т. е. пуск осуществляют сначала при последовательном соединении двигателей, а затем переходят на параллельное или смешанное соединение. Для изменения направления движения изменяют направление тока в обмотках якоря или главных полюсов. Скорость вращения двигателя
 , (19.3)
, (19.3)
г

Рис. 19.8. Схемы группировки двигателей электровоза для регулирования скорости его движения:
а – при двух двигателях; б – при четырех двигателях;  – пусковой реостат;
– пусковой реостат;
 – двигатели
– двигатели
де  – ток двигателя;
– ток двигателя;  , – сопротивление обмоток якорей двигателя и реостата;
, – сопротивление обмоток якорей двигателя и реостата;  – магнитный поток;
– магнитный поток;  – постоянная.
– постоянная.
Как видно из (19.3), скорость движения можно регулировать изменением  , , . Регулирование реостатом невыгодно из-за больших потерь, поэтому на электровозах устанавливают не регулировочные, а пусковые реостаты, рассчитанные на кратковременное включение. Регулирование производят или группировкой двигателей, т. е. изменением , или ослаблением магнитного поля .
, , . Регулирование реостатом невыгодно из-за больших потерь, поэтому на электровозах устанавливают не регулировочные, а пусковые реостаты, рассчитанные на кратковременное включение. Регулирование производят или группировкой двигателей, т. е. изменением , или ослаблением магнитного поля .
На электровозах с двумя тяговыми двигателями возможны последовательное и параллельное соединения (рис. 19.8, а). При последовательном соединении скорость при одном и том же значении тока якоря примерно равна половинному значению скорости при параллельном соединении. На электровозах с четырьмя двигателями можно получить три соединения: последовательное, последовательно-параллельное и параллельное (рис. 19.8, б).
Регулирование скорости изменением магнитного потока осуществляют ослаблением поля, что, как следует из (19.3), ведет к повышению скорости. Коэффициент ослабления поля
 , (19.4)
, (19.4)
где  – ампервитки обмотки возбуждения при ослабленном поле;
– ампервитки обмотки возбуждения при ослабленном поле;  – то же при полном поле.
– то же при полном поле.
Рассмотренные два способа регулирования скорости имеют ограниченные возможности по глубине регулирования, поэтому нередко применяют комбинированный способ – изменение группировки двигателей и ослабление поля. На электромеханической характеристике каждой ходовой ступени скорости, а также каждой ступени ослабления поля соответствует отдельная кривая.
На электровозах применяют электрическое торможение: генераторное и противовключением (противотоком). Генераторное торможение возможно с работой двигателей на реостат (реостатное, или динамическое, торможение) или с отдачей энергии в сеть (рекуперативное торможение). На шахтных электровозах применяют только реостатное торможение, при котором тяговые двигатели, отключенные от сети, переходят на генераторный режим и расходуют энергию на нагрев реостата  (рис. 19.9, б). Торможение может осуществляться при последовательном самовозбуждении (наиболее распространенный способ), при независимом и при смешанном возбуждении тяговых двигателей. При последовательном самовозбуждении переход тягового двигателя с двигательного (рис. 19.9, а) на генераторный режим после отключения его от сети (рис. 19.9, б) происходит благодаря полю остаточного магнетизма. Чтобы не размагнитить двигатель, ток в обмотке возбуждения должен сохранить первоначальное направление, для чего производят переключение концов обмотки возбуждения. При этом в генераторном режиме ток якоря меняет направление.
(рис. 19.9, б). Торможение может осуществляться при последовательном самовозбуждении (наиболее распространенный способ), при независимом и при смешанном возбуждении тяговых двигателей. При последовательном самовозбуждении переход тягового двигателя с двигательного (рис. 19.9, а) на генераторный режим после отключения его от сети (рис. 19.9, б) происходит благодаря полю остаточного магнетизма. Чтобы не размагнитить двигатель, ток в обмотке возбуждения должен сохранить первоначальное направление, для чего производят переключение концов обмотки возбуждения. При этом в генераторном режиме ток якоря меняет направление.
При параллельной работе двух двигателей на реостат возможно появление уравнительных токов, т. е. один из двигателей работает как генератор, а другой – как двигатель. Чтобы этого не было, применяют перекрестную схему соединения (рис. 19.9, в) или же более совершенную перекрестно-петлевую схему (рис. 19.9, г).
В процессе реостатного торможения по мере снижения скорости движения постепенно выводят ступени реостата, поддерживая примерно постоянный тормозной ток. При малой скорости даже при полностью выведенном тормозном сопротивлении практически исчезает э. д. с. двигателя, а вместе с ней и тормозная сила. Окончательная остановка поезда или удержание его на спуске должны осуществляться колодочными тормозами.
Т
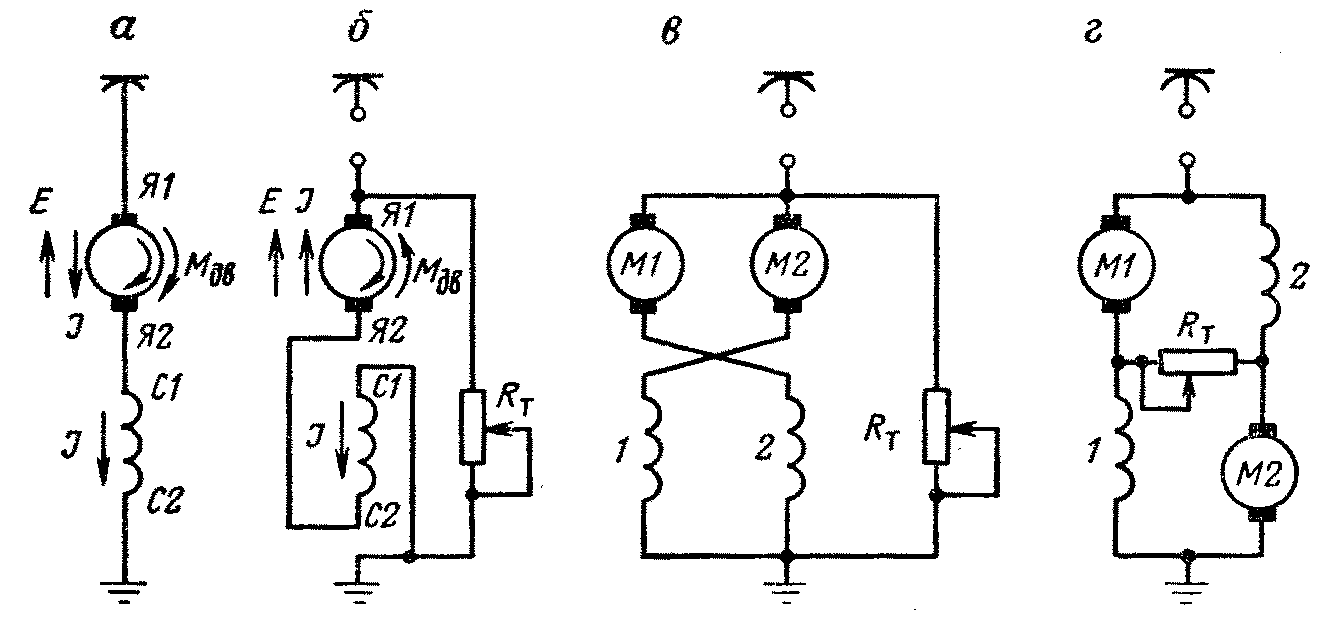
Рис. 19.9. Схемы включения двигателей электровоза:
а – в двигательном режиме; б, в, г – в режиме реостатного торможения
орможение противовключением осуществляется постановкой реверсивной рукоятки в положение «назад» при движении электровоза «вперед» (колеса могут иногда действительно вращаться «назад»). Торможение сопровождается броском тока, величина которого зависит от напряжения на зажимах двигателей и от силы сцепления колес с рельсами. Торможение противовключением на угольных шахтах весьма эффективно и не столь опасно, как это обычно считают. Этим методом можно пользоваться, соблюдая меры предосторожности: только на первых реостатных позициях при последовательно соединенных двигателях, в случае, когда коэффициент сцепления мал, например, при откатке контактными электровозами на угольных шахтах с загрязненными рельсами. Применение этого вида торможения на аккумуляторных и контактных электровозах на рудных шахтах недопустимо. Инструкциями по эксплуатации разрешается торможение противовключением только в экстренных случаях.
III. Система управления с секционированием тяговой батареи (УСБ)
В системе УСБ (рис. 19.10) используется комбинированный метод пуска и регулирования скорости движения изменением группировки секций ТБ1, ТБ2 тяговой батареи и тяговых двигателей Ml, М2, ослаблением поля возбуждения и применением элементов реостатной схемы (только для первой пусковой позиции). На позициях 1, 2, 3 питание последовательно соединенных двигателей осуществляется половинным напряжением батареи, что достигается параллельным включением секций ТБ1 та. ТБ2. На позиции 1 полное поле возбуждения и в цепь двигателей включена секция пускового сопротивления, на позиции 2 это сопротивление выведено, на позиции 3 поле ослаблено путем параллельного включения обмоток возбуждения. На позиции 4 последовательно соединенные двигатели включены на полное напряжение батареи, на позиции 5 ослаблено поле возбуждения, на позиции 6 поле возбуждения полное и двигатели соединены параллельно. На позиции 7 двигатели отсоединены от батареи и работают в режиме реостатного торможения по перекрестно-петлевой схеме (см. рис. 19.9, г). В качестве коммутирующих элементов применены силовые полупроводниковые диоды, позволяющие при наименьшем числе силовых контактов обеспечить все необходимые р

Рис. 19.10. Упрощенные схемы токопрохождения в цепях двигателей
при управлении электровозом с применением секционирования тяговой батареи
ежимы работы.





