

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...
Топ:
Генеалогическое древо Султанов Османской империи: Османские правители, вначале, будучи еще бейлербеями Анатолии, женились на дочерях византийских императоров...
Определение места расположения распределительного центра: Фирма реализует продукцию на рынках сбыта и имеет постоянных поставщиков в разных регионах. Увеличение объема продаж...
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного...
Интересное:
Наиболее распространенные виды рака: Раковая опухоль — это самостоятельное новообразование, которое может возникнуть и от повышенного давления...
Что нужно делать при лейкемии: Прежде всего, необходимо выяснить, не страдаете ли вы каким-либо душевным недугом...
Мероприятия для защиты от морозного пучения грунтов: Инженерная защита от морозного (криогенного) пучения грунтов необходима для легких малоэтажных зданий и других сооружений...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
КОНТРОЛЬНАЯ РАБОТА
по дисциплине: «Моделирование вычислительных систем»
Вариант 3
Ф.И.О. студента: Грудцин Александр Игоревич
Группа 0115-АС(о)у Специальность 09.03.01 «Информатика и вычислительная техника»
Профильная направленность образовательной программы «Автоматизированные системы обработки информации и управления»
Проверил работу ______________ / В.А.Филин/
Оглавление
Раздел 1. 3
1.1Система-Вычислительные системы. 3
1.2Классификация вычислительных систем. 7
1.3Суперкомпьютеры и особенности их архитектуры. 9
Раздел 2. 11
Моделирование МВС в среде GPSS. 11
2.1.Пояснение к работе: 11
2.2. Формулировка задачи. 18
2.3. Решение аналитическим методом. 20
2.4 Моделирование в пакете GPSS: 22
Раздел 3. 24
3.1.Определение, понятия динамической системы. 24
3.2. Расчетная часть. 27
3.2.1 Постановка задачи моделирование системы. Целью разработки данного раздела является ознакомление с методикой моделированием анализа и синтеза динамической системы заданной структуры и её параметризация. 27
3.2.2 Исходная система представляет собой последовательное соединение элементов, и она относится к классу систем с последовательным соединением. 27
3.2.3 В теории моделирования в частности динамических систем разработаны различные подходы анализа свойств и их мат. модели. 28
3.2.4 Структурное моделирование систем. 36
Вывод: 41
Список литературы.. 41
Раздел 1
Раздел 2
Моделирование МВС в среде GPSS
План работы:
Формулировка задачи
Решение аналитическим методом
Моделирование в пакете GPSS
Рис.2.2. Пример кода программы.
Понятие «вычислительный процесс» (или просто – процесс) является одним из основных при рассмотрении операционных систем.
|
|
Под процессом обычно понимается последовательность операций при выполнении программы или ее части в совокупности с используемыми данными.
В общем случае процесс и программа представляют собой разные понятия.
Программа– это план действий, а
процесс – это само действие,
понятие процесса включает программный код, данные, содержимое стека, содержимое адресного и других регистров процессора.
Таким образом, для одной программы могут быть созданы несколько процессов в том случае, если с помощью одной программы в центральном процессоре вычислительной машины выполняется несколько несовпадающих последовательностей команд.
Все, что выполняется в вычислительных системах, организовано как набор процессов. Понятно, что реально на однопроцессорной компьютерной системе в каждый момент времени может исполняться только один процесс
Для мультипрограммных вычислительных систем псевдопараллельная обработка нескольких процессов достигается с помощью переключения процессора с одного процесса на другой. Пока один процесс выполняется, остальные ждут своей очереди. Таким образом, каждый процесс может находиться как минимум в 2-х состояниях: процесс исполняется и процесс не исполняется.

Рис.2.3. Состояния процесса
Система массового обслуживания (СМО) – математический
(абстрактный) объект, содержащий один или несколько приборов П
(каналов), обслуживающих заявки З, поступающие в систему, и
накопитель Н, в котором находятся заявки, образующие очередь О и
ожидающие обслуживания
Для описания потока заявок, в общем случае, необходимо задать
интервалы времени t i - i k -1 между соседними моментами t k - 1 и t k
поступления заявок с порядковыми номерами (k - 1) и k соответственно
(k 1, 2,...; t 0 0 – начальный момент времени).
| P0 |
| P1 |
| Pn |
P0 P 1
|
|
µ1µ2µ n
Граф состояний процесса с конечным числом состояний.
Граф перехода имеет вид цепочки состояний в которой каждое состояние (кроме крайних) связаны с двумя соседними состояниями, а крайние состояния P 0 и Pn только с одним соседним состоянием.
Граф переходов процесса с конечным числом состояний соответствует матрицы интенсивностей переходов.
P į 0 1 2 n – 1 n
0 - λ0λ0 0 0 0
1 µ1 – (λ1 + µ1) λ1 0 0
2 0 µ2– (λ2+ µ2) 0 0
. . . ....... . .
. . . ..... . .
. . . ..... . .
. . . ..... . .
n – 1 0 0 0 – (λ n -1 + µ n -1) λ n -1
n 0 0 0 µ n - µ n
Изучение случайных процессов заключается в определении вероятностей того, что в момент времени система находится в том или ином состоянии. Совокупность таких вероятностей, описывающих состояние системы в различные моменты времени дают достаточно полную информацию о протекающем в системе случайного процесса.
Рассмотрим систему с конечным числом состояний P 1 ,... Pn.
Обозначим через вероятность того, что в момент времени i стоянии система в состоянии Pį.
В любой момент времени i система может находится в одном из n
Возможных состояний, то есть для любого момента времени выполняется условие ∑n1Pį (i) = 1, которое называют нормированным
Совокупность вероятностей Pį () может быть представлено вектором с числом координат, равных числу возможных состояний.
P(i) = { Pį1(i); P2(i); … Pįn(i)}
0≤Pį (i)≤ 1; ∑n1Pį (i) = 1
Сформулируем правила составления уравнений для стационарных вероятностей состояний Марковского процесса по графу переходов и матрице интенсивностей переходов.
Правило 1. (по графу переходов).
В левой части каждого уравнения записываются вероятности рассматриваемого состояния умноженное на сумму интенсивностей переходов из данного состояния во все другие состояния.
Правая часть уравнения представляет собой сумму членов, число которых равно числу входов в данное состояние дуг и каждый такой член представляет собой произведение интенсивности перехода, данной дуге на вероятность состояния, из которого исходит эта дуга.
|
|
λ0 P 0 = µ1 P 1
(λ1 + µ1) P 1 = λ0 P 0 + µ2 P 2
.
.
.
(λ k + µk) Pk = λ k-1 Pk-1 + µk+1 Pk+1
µn Pn = λ n-1 Pn-1
P 0 + P 1 + … + Р. = 1
Правило 2. (по матрице интенсивностей переходов).
Для каждого столбца матрицы интенсивностей переходов составляется соответствующие уравнения как сумма произведений интенсивности перехода на стационарную вероятность состояния с номером соответствующей строки, приравненное нулю.
- λ0 P 0 + µ1 P 1 = 0
-(λ1 + µ1) P 1 + λ0 P 0 + µ2 P 2 = 0
.
.
.
- (λ k + µk) Pk + λ k-1 Pk-1 + µk+1 Pk+1 = 0
-- µn Pn + λ n-1 Pn-1 = 0
P0 +P1 + … + Pn = 1
Решая полученную систему уравнений аналитически или с применением численных методов можно определить значения P 0, P1, … Pn стационарных вероятностей процесса.
Кроме того, могут быть рассчитаны другие характеристики исследуемой системы, в частности.
- коэффициент загрузки магистрали η = (1 - P 0)
- среднее время ожидания программ
Средние значения длительности фаз счета 
Средние значения длительности фаз обмена 

Среднее время ожидания заявки время ожидания tож (среднее время пребывания заявки в очереди) является математическим ожиданием времени ожидания. Время ожидания tож заявки является случайной величиной и равно сумме длительностей интервалов времени, в течении которых заявка находится в очереди, начиная с момента появления заявки на выходе СМО и кончая моментом, когда заявка последний раз покидает очередь по причине назначения на обслуживание или ухода из очереди (в случае нетерпеливых заявок).
Среднее время ожидания заявки tожср в общем случае является суммой составляющих
- (tожн)ср среднего начального времени ожидания, равного промежутку времени между моментами появления заявки на входе СМО и моментом первого назначения заявки на обслуживание или ухода из очереди.
- (tож n)ср- среднего времени ожидания в прерванном состоянии, равного в общем случае сумме промежутков времени между моментами поступления заявки, обслуживание которой было прервано, в очередь и моментами либо повторного назначения заявки на дообслуживание (продолжение обслуживание заявки с того состояния, в котором она находилась в момент очередного прерывания), либо потери заявки за счет ухода.
|
|
tожср = (tожн)ср + (tож n)ср
Для систем без потерь среднее время ожидания можно определять по формуле:
n ср = (tожср) * λ
Для определения nср необходимо знание совокупности вероятностей нахождения в очереди заявок.
2.2. Формулировка задачи
Для мультипроцессорной вычислительной системы с числом процессоров n с двумя независимыми модулями памяти, связанными между собой общей шиной. Предложить эффективный алгоритм разрешения конфликтов на магистрали. Известно, что каждый из процессоров работает по независимой от другой программы. Каждая программа представляет чередующуюся последовательность фаз счета и обмена с памятью. Средние значения длительности фаз счета и обмена и соответственно. Структура системы представлена на рис.4.6.
| …. |
| 1 |
| 3 |
| 2 |
| n |
| …. |
| ОП |
| ОП |
Рис.2.2.
Определить коэффициент загрузки магистрали и временные задержки в выполнении каждой из программ при следующих условиях:
1) выбрать бесприоритетную дисциплину разрешения конфликтов и провести анализ при различных характеристиках программ и усредненных характеристиках;
2) проанализировать указанные приоритетные правила разрешения конфликтов (приоритет убывает с номером задачи), приоритет относительный и абсолютный.
Исходные данные представлены в табл.1 (время измеряется в относительных единицах).
Таблица 1
|
Вариант | Программы |
Приоритеты | |||||||
| 1 | 2 | 3 | |||||||
| τ | T | τ | t | τ | t | 1 | 2 | 3 | |
| 3 | 35 | 6 | 45 | 6 | 55 | 6 | 1 | 2 | 3 |
Бесприоритетная дисциплина решения конфликтов
 ,
,  ,
,  ;
;
 ,
,  ,
,  ;
;

2.3. Решение аналитическим методом.
Бесприоритетная дисциплина решения конфликтов.


















При помощи программы MicrosoftOfficeExcel, по методу обратных матриц, записываем систему уравнений в виде матрицы и столбца свободных членов, находим обратную матрицу и перемножаем на столбец свободных членов, в результате получаем корни уравнений (стационарные вероятности процесса):
| p000= | 0,5085 |
| p100= | 0,1059 |
| p200= | 0,0936 |
| p300= | 0,0785 |
| p120= | 0,0168 |
| p130= | 0,0160 |
| p230= | 0,0121 |
| p210= | 0,0178 |
| p310= | 0,0140 |
| p320= | 0,0121 |
| p123= | 0,0023 |
| p132= | 0,0023 |
| p231= | 0,0023 |
| p213= | 0,0023 |
| p312= | 0,0023 |
| p321= | 0,0023 |
Коэффициент загрузки магистрали  = 0.39
= 0.39
Среднее время ожидания программ:



2.4 Моделирование в пакете GPSS:
Для моделирования вычислительной системы в пакете GPSS были составлены следующие программы:
|
|
Бесприоритетная дисциплина:
proc1 equ 42
exch1 equ 8
proc2 equ 52
exch2 equ 8
proc3 equ 62
exch3 equ 8
initial x$cnt 100
GENERATE,,, 1;,1 ;Приоритет. Тип приоритета?
fproc queue fpq
advance (exponential(1,0, proc1))
depart fpq
seize exch
advance (exponential(1,0,exch1))
release exch
savevalue cnt-,1
test le x$cnt,0,fproc
savevalue fres,((ac1/qc$fpq)-qt$fpq)
terminate 1
GENERATE,,,1;,2
sproc queue spq
advance (exponential(1,0,proc2))
depart spq
seize exch
advance (exponential(1,0,exch2))
release exch
savevalue cnt-,1
test le x$cnt,0,sproc
savevalue sres,((ac1/qc$spq)-qt$spq)
terminate 1
GENERATE,,,1;,3
tproc queue tpq
advance (exponential(1,0,proc3))
depart tpq
seize exch
advance (exponential(1,0,exch3))
release exch
savevalue cnt-,1
test le x$cnt,0,tproc
savevalue tres,((ac1/qc$tpq)-qt$tpq)
terminate 1
Start 3
Отчет
GPSS World Simulation Report - Untitled Model 3.3.1
Saturday, April 15, 2017 21:33:39
START TIME END TIME BLOCKS FACILITIES STORAGES
0.000 2202.558 33 1 0
NAME VALUE
CNT 10006.000
EXCH 10010.000
EXCH1 8.000
EXCH2 8.000
EXCH3 8.000
FPQ 10007.000
FPROC 2.000
FRES 10012.000
PROC1 42.000
PROC2 52.000
PROC3 62.000
SPQ 10008.000
SPROC 13.000
SRES 10013.000
TPQ 10009.000
TPROC 24.000
TRES 10011.000
LABEL LOC BLOCK TYPE ENTRY COUNT CURRENT COUNT RETRY
1 GENERATE 1 0 0
FPROC 2 QUEUE 43 0 0
3 ADVANCE 43 0 0
4 DEPART 43 0 0
5 SEIZE 43 0 0
6 ADVANCE 43 0 0
7 RELEASE 43 0 0
8 SAVEVALUE 43 0 0
9 TEST 43 0 0
10 SAVEVALUE 1 0 0
11 TERMINATE 1 0 0
Раздел 3.
Моделирование динамической управляющей системы заданной структуры с коррекцией по критерию устойчивости
3.1.Определение, понятия динамической системы.
Динамические системы - это системы, которые под действием внешних и внутренних сил изменяют во времени свои состояния. Представления о динамических системах возникли как обобщение понятия механической системы, поведение которой описывается законами динамики. В современной науке понятие динамической системы охватывает системы практически любой природы—физические, химические, биологические, экономические, социальные и др. При этом системы характеризуются различной внутренней организацией—жестко-детерминированные, стохастические, нелинейные, системы с элементами самоорганизации, самоорганизующиеся.
Важнейшим свойством динамических систем является их устойчивость, т. е. сохранение системой своей базовой структуры и основных выполняемых функций в течение определенного времени и при относительно небольших и разнообразных внешних воздействиях, и внутренних возмущениях. Устойчивость есть внутреннее свойство систем, а не результат внешнего воздействия. Представления же о развитии этих систем отражают такие изменения их структурной организации, которые ведут к более эффективному выполнению системой своих основных функций. Качественные перестройки систем анализируются в теории катастроф, которая рассматривается как ветвь общей теории динамических систем.
Развитие представлений о динамических системах связано с переходом к познанию все более сложных систем. При этом особую роль приобретает изучение динамики внутренних свойств систем. В случае механических систем действие внутренних факторов сводилось к силам инерции. По мере усложнения систем возрастает значение внутренних факторов. На первый план выходят проблемы изучения источников внутренней активности систем и природы их целенаправленного функционирования и поведения.
Абстрактная динамическая система представляет собой математическую модель некоторого объекта, процесса или явления.
Динамическая система также может быть представлена как система, обладающая состоянием. При таком подходе, динамическая система описывает (в целом) динамику некоторого процесса, а именно: процесс перехода системы из одного состояния в другое. Фазовое пространство системы — совокупность всех допустимых состояний динамической системы. Таким образом, динамическая система характеризуется своим начальным состоянием и законом, по которому система переходит из начального состояние в другое.
Расчетная часть.
3.2.1 Постановка задачи моделирование системы. Целью разработки данного раздела является ознакомление с методикой моделированием анализа и синтеза динамической системы заданной структуры и её параметризация.
Задачи моделирование системы:
1) Разработка математической модели каждого элемента.
2) Исследование свойств и характеристик по разработанной математической модели.
3) Структурный анализ системы и разработка её математической модели.
4) Освоение методики моделирования устойчивости системы и анализ устойчивости исходной системы.
5) Освоение методики синтеза системы обеспечивающий её устойчивость.
3.2.2 Исходная система представляет собой последовательное соединение элементов, и она относится к классу систем с последовательным соединением.
Другие группы таких систем являются системы с параллельным соединением элементов и системой обратной связи.
Системы с последовательным соединением элементов - такие системы в которых выходная величина предыдущего элемента является входной величиной последующего.
Математическая модель системы с последовательным соединением выражается как произведение математической модели каждого элемента.
Математическая модель системы является исходной информацией для анализа её поведения в частности устойчивости системы.
Несмотря на многообразие физических моделей системы их поведение в форме математического выражения можно классифицировать в конечные группы.
3.2.3 В теории моделирования в частности динамических систем разработаны различные подходы анализа свойств и их мат. модели.
Одним из распространенных и наглядных подходов исследования свойств элементов является частотный метод.
Xвх Эл-т Хвых
Хвх Хвых


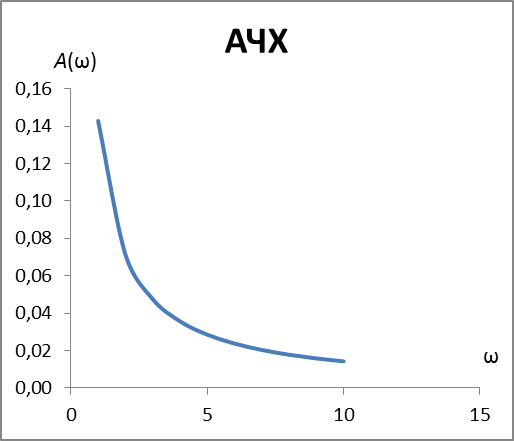
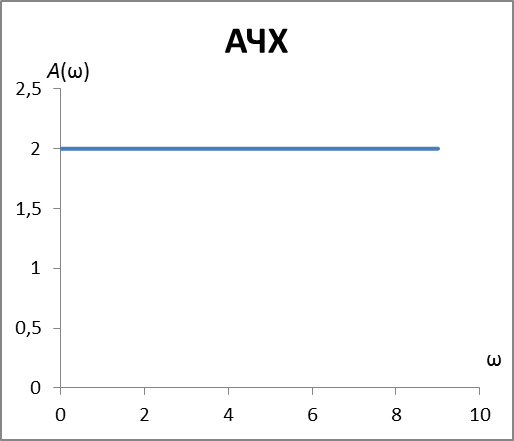
АЧХ
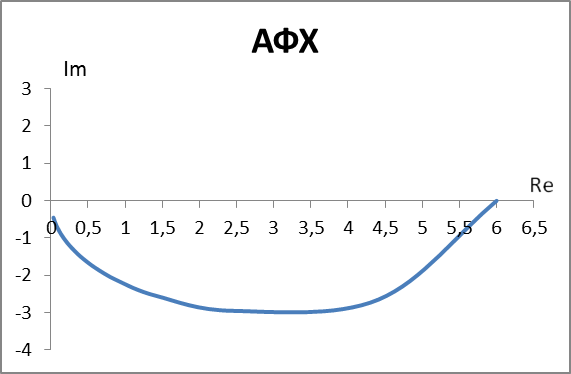
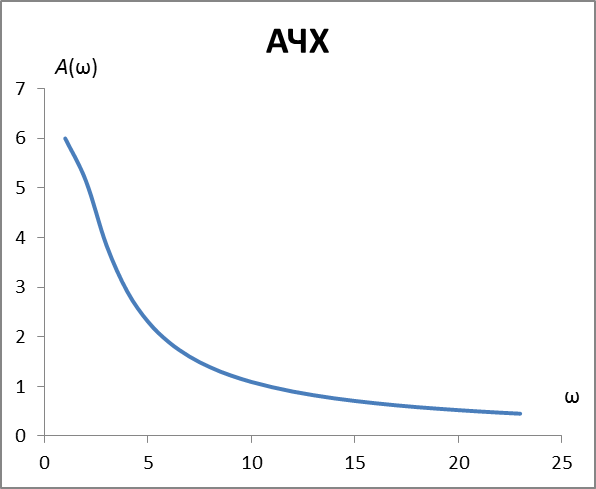
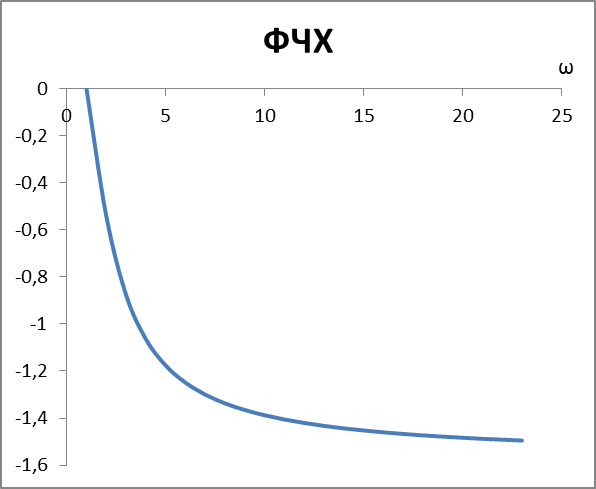
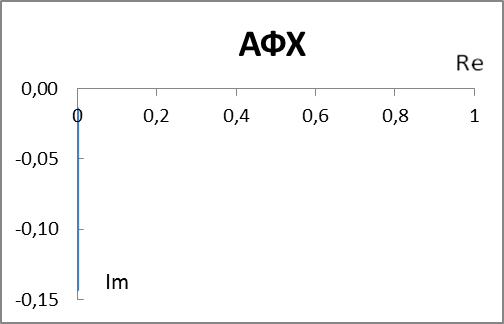
АФХ
ФЧХ
Рис. 3.2. Частотный метод.
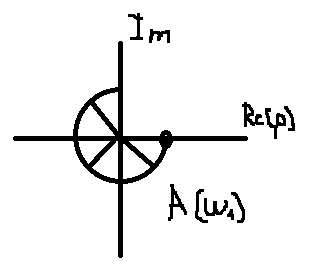
Рис. 3.3. Частотный метод.
 (p)
(p)
АФХ =>
В результате данного исследования устанавливаются следующие характеристики:
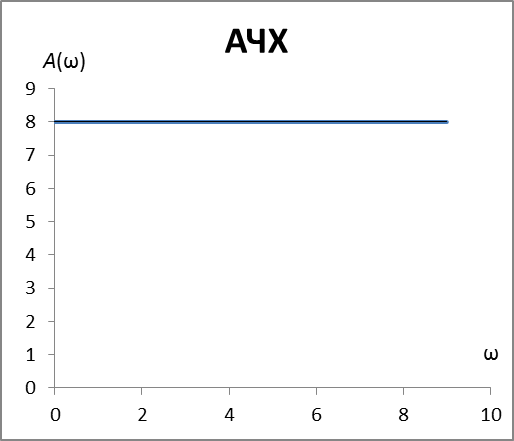
АЧХ - амплитудно-частотная характеристика
ФЗХ - фазо-частотная характеристика
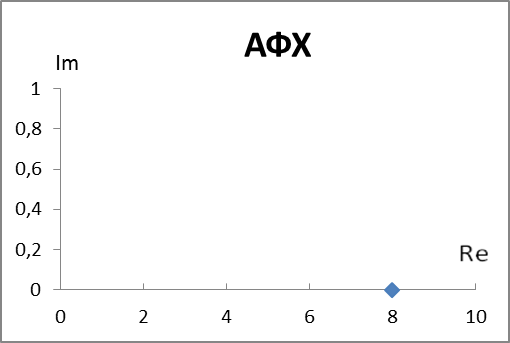
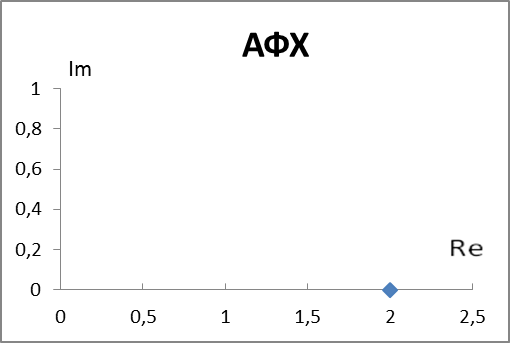
АФХ - амплитудно-фазовая характеристика
Для получения этих характеристик дифференциальное уравнение элементов необходимо преобразовать в его передаточную функцию. Она будет являться математической моделью, но другой формы.
Раскроем суть этого преобразования. Пусть задана математическая модель в виде обобщенного дифференциального уравнения.

Левая часть этого уравнения показывает изменения выходной величины во времени.
Правая часть уравнения показывает характер изменения входного воздействия.
Частотный подход к исследованию свойств системы предполагает переход от данного вида уравнения к передаточной функции. Первым этапом перехода является преобразования дифференциального уравнения в уравнение операторной формы. Для этого используется преобразование Лапласа, интегральное преобразование, связывающее функцию комплексного переменного (изображение) с функцией вещественного переменного (оригинал). С его помощью исследуются свойства динамических систем и решаются дифференциальные и интегральные уравнения.
Чтобы осуществить этот переход необходимо оригинал преобразовать в изображение.

Идентификация элементов.
Вариант 3:
| K 1 | K 2 | T 2 | T 3 | K 4 | K 5 |
| 1 | 3 | 4 | 8 | 5 | 2 |

|

|
| Элемент №1 |


|
|
| АФХ | |
| АЧХ | ФЧХ | Im | Re |
| 1 | 0 | 0 | 8 |
|
|

|
| Элемент №2 |

| АФХ | ||||
| АЧХ | ФЧХ | Im | Re | ω |
| 6 | 0 | 0 | 6 | 0 |
| 5,14 | -0,54 | -2,65 | 4,41 | 0,1 |
| 3,84 | -0,88 | -2,95 | 2,46 | 0,2 |
| 2,91 | -1,06 | -2,55 | 1,42 | 0,3 |
| 2,31 | -1,18 | -2,13 | 0,89 | 0,4 |
| 1,90 | -1,25 | -1,80 | 0,60 | 0,5 |
| 1,61 | -1,30 | -1,55 | 0,43 | 0,6 |
| 1,39 | -1,34 | -1,35 | 0,32 | 0,7 |
| 1,22 | -1,37 | -1,20 | 0,25 | 0,8 |
| 1,09 | -1,39 | -1,07 | 0,20 | 0,9 |
| 0,99 | -1,41 | -0,97 | 0,16 | 1 |
| 0,90 | -1,42 | -0,89 | 0,13 | 1,1 |
| 0,83 | -1,43 | -0,82 | 0,11 | 1,2 |
| 0,76 | -1,44 | -0,76 | 0,10 | 1,3 |
| 0,71 | -1,45 | -0,70 | 0,08 | 1,4 |
| 0,66 | -1,46 | -0,66 | 0,07 | 1,5 |
| 0,62 | -1,47 | -0,62 | 0,06 | 1,6 |
| 0,59 | -1,47 | -0,58 | 0,06 | 1,7 |
| 0,55 | -1,48 | -0,55 | 0,05 | 1,8 |
| 0,52 | -1,48 | -0,52 | 0,05 | 1,9 |
| 0,50 | -1,49 | -0,50 | 0,04 | 2 |
| 0,47 | -1,49 | -0,47 | 0,04 | 2,1 |
| 0,45 | -1,50 | -0,45 | 0,03 | 2,2 |

|
| Элемент №3 |
|
|




| АФХ | ||||
| АЧХ | ФЧХ | Im | Re | ω |
| 0,14 | 0 | -0,14 | 0 | 1 |
| 0,07 | 0 | -0,07 | 0 | 2 |
| 0,05 | 0 | -0,05 | 0 | 3 |
| 0,04 | 0 | -0,04 | 0 | 4 |
| 0,03 | 0 | -0,03 | 0 | 5 |
| 0,02 | 0 | -0,02 | 0 | 6 |
| 0,02 | 0 | -0,02 | 0 | 7 |
| 0,02 | 0 | -0,02 | 0 | 8 |
| 0,02 | 0 | -0,02 | 0 | 9 |
| 0,01 | 0 | -0,01 | 0 | 10 |
|
|

|
| Элемент №4 |

|
|
| АФХ | |
| АЧХ | ФЧХ | Im | Re |
| 2 | 0 | 0 | 2 |
3.2.4 Структурное моделирование систем.
Для исследования системы (структура которой известна) необходимо получить её математическую модель. Эта модель определяется в свою очередь, моделями каждого элемента и схемой соединения этих элементов в системе. Несмотря на многообразие возможных схем соединения элементов в системе в теории систем их классифицируют на 3 группы:
1) Система с последовательным соединением элементов. Схема такого соединения задана в настоящей работе.

Рис.3.4. Структурная схема последовательного соединения звеньев.
2) Параллельно соединение элементов системы
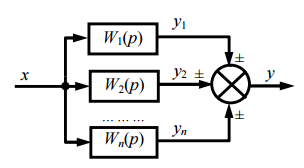
Рис.3.5. Структурная схема параллельного соединения звеньев.
3) Встречно-параллельное соединение.
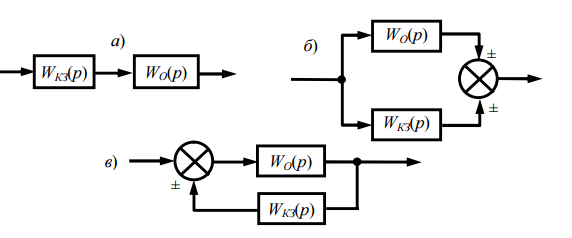
Рис.3.6. Структурные схемы типов коррекции: а- последовательная; б- параллельная; в-с помощью дополнительных обратных связей.
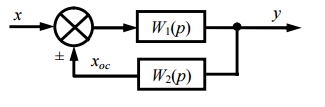
Рис.3.7. Структурная схема звена охваченного обратной связью.
Реальные системы могут содержать все виды соединений. Тогда они называются - схема с комбинированным соединением элементов.
Целью структурного моделирования является получение математической модели всех систем.
В теории систем такие модели определяются моделями каждого элемента.
Iгр
IIгр
IIIгр

А)
| 5 |
| 4 |
| 3 |
| 2 |
| 1 |
В)
Х5вых Хвх5
А) – Структурная схема системы; В) – Элементы обратной связи.
1,2,3,4,- элементы динамической системы; 5 - корректирующий элемент обратной связи.
Х i (I от 1 до 3) – переменные структурных элементов;
Хвых – целевая функция процесса;
Хвх – входная величина системы
Семантическая модель поведения элемента(подразделения) в общей системе:
Элемент №1 – Реакция на входное воздействие Хвх происходит без задержки времени с коэффициентом усиления К1.
Элемент №2 - Реакция на входное воздействие Х1 характеризуется постепенным возрастанием выходной величины Х2 до нового значения (с коэффициентом усиления К2 и постоянной времени Т2).
Элемент №3 – Реакция на входное воздействие Х2 характеризуется непрерывным возрастанием выходной величины Х 3 со скоростью (1/ T 3).
Элемент №4 – Реакция на входное воздействие Х3 характеризуется изменением выходной величины Хвых без задержки во времени с коэффициентом усиления К4.
Корректирующее воздействие управляющего органа (элемента 5) осуществляется по закону
Х5вых = К5 Х5вх.
|
|
|

История развития пистолетов-пулеметов: Предпосылкой для возникновения пистолетов-пулеметов послужила давняя тенденция тяготения винтовок...

Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим...

Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...

Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!