Часто при решении практических задач модального управления в САУ бывают доступны для измерения не все переменные состояния объекта, а только некоторые входы и выходы. В связи с этим требуется искусственное воспроизведение промежуточных переменных с помощью технических средств, получивших название наблюдателей, или наблюдающих устройств, для построения которых необходимо, чтобы объект был невырожденным. В настоящее время известны два таких подхода косвенного определения компонент вектора состояния управляемого объекта, недоступных прямому измерению. Один подход основаны на применении динамических компенсаторов, т.е. идентификаторов состояния, другие методы основаны на применении наблюдающих устройств, предложенных Р.Калманом (фильтр Калмана) и Луенбергером.
При анализе детерминированных механических систем задача оценки всех переменных состояния управляемого объекта может быть решена с помощью более простого устройства, называемого наблюдающим устройством Луенбергера. Входными сигналами для этого устройства служат доступные измерению выходные координаты объекта, а также поступающие на него входные воздействия.
Когда часть компонент полного вектора состояния можно определить по результатам непосредственного их измерения на управляемом объекте, то целесообразно синтезировать редуцированные наблюдающие устройства. Редуцированным наблюдающим устройством называется устройство, порядок характеристического уравнения которого меньше порядка характеристического полинома наблюдаемой системы.
Сформируем требуемый закон управления, но вместо переменных состояния реального объекта будем использовать их оценки, полученные с помощью наблюдателя (рис.2.1).
Пусть объект управления описывается уравнением (1.1). Тогда работа наблюдающего устройства для оценки переменных состояния X по измеряемым переменным управления U и выходным переменных Y должна строиться в соответствии с уравнением:
 (2.1)
(2.1)
где  и
и  - оценочные соответственно вектора переменных состояния и выхода наблюдателя; N- матрица коэффициентов усиления (настройки) наблюдателя, подлежащих определению.
- оценочные соответственно вектора переменных состояния и выхода наблюдателя; N- матрица коэффициентов усиления (настройки) наблюдателя, подлежащих определению.
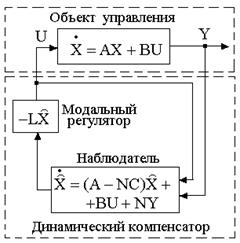
Рис.2.1
Уравнения наблюдателя (2.1) описывают регулятор, входом которого является процесс Y, выходом – новое управляющее воздействие U. В отличие от модального регулятора с матрицей коэффициентов обратных связей L по уравнению (1.2), представленный регулятор является уже динамической системой, порядок которой совпадает с порядком объекта управления. И называют такой регулятор динамическим компенсатором. Объединив уравнения (2.1), получим:
 (2.2)
(2.2)
Если в уравнении (2.2) заменить выход Y = CX, то уравнение наблюдателя можно записать в следующем виде:
 (2.3)
(2.3)
Обозначим ошибку оценки переменных состояния как

и вычтем из уравнения (2.3) уравнение (1.1). Тогда векторное уравнение для ошибки будет иметь вид:

где H- матрица динамических свойств наблюдателя.
Выбрав элементы матрицы H так, чтобы система (2.3) была устойчивой, получим
 (2.4)
(2.4)
т.е. при  оценочные переменные состояния наблюдателя стремятся к переменным состояния объекта. Известно, что если объект управления невырожденный, то выбором элементов матрицы N наблюдателю можно придать любое желаемое распределение корней характеристического уравнения (2.5).
оценочные переменные состояния наблюдателя стремятся к переменным состояния объекта. Известно, что если объект управления невырожденный, то выбором элементов матрицы N наблюдателю можно придать любое желаемое распределение корней характеристического уравнения (2.5).
D(p)=det  (2.5)
(2.5)
Уравнение наблюдателя в конечном итоге приобретает вид:
 (2.6)
(2.6)
Для выбора распределения корней характеристического уравнения наблюдателя обычно пользуются одной из стандартных форм, например (1.6). При этом также как и при расчете модального регулятора приравнивают коэффициенты при одинаковых степенях оператора p в уравнениях (2.5) и (1.6) и находят выражения для определения элементов матрицы N наблюдателя через параметр w стандартных форм. Конкретное значение w выбирают так, чтобы быстродействие наблюдателя было выше, чем системы, которая через него замкнута.





