

Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Топ:
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного хозяйства...
Оснащения врачебно-сестринской бригады.
Определение места расположения распределительного центра: Фирма реализует продукцию на рынках сбыта и имеет постоянных поставщиков в разных регионах. Увеличение объема продаж...
Интересное:
Лечение прогрессирующих форм рака: Одним из наиболее важных достижений экспериментальной химиотерапии опухолей, начатой в 60-х и реализованной в 70-х годах, является...
Подходы к решению темы фильма: Существует три основных типа исторического фильма, имеющих между собой много общего...
Аура как энергетическое поле: многослойную ауру человека можно представить себе подобным...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Поведение в системе автоматического управления определяется корнями характеристического уравнения, которым, в свою очередь, соответствуют составляющие свободного движения системы, называемые «модами». Модальное управление – это такое управление, когда достигается требуемый характер переходных процессов за счет обеспечения необходимого расположения корней характеристического полинома на комплексной плоскости. При этом задача сводится к определению коэффициентов соответствующих обратных связей по состоянию объекта, а не путем применения корректирующих звеньев в прямой цепи САУ.
Это управление применяется тогда, когда все составляющие вектора состояния объекта управления доступны непосредственному измерению (полная управляемость). Для линейных динамических систем корни замкнутой системы можно смещать в любые желаемые положения при законе управления в виде линейной функции переменных состояния. Эта же задача может быть решена и при использовании в законе управления лишь части переменных состояния (неполная управляемость), если для управления использовать не один, а несколько входов объекта, когда используется подача внешних воздействий в нескольких различных точках.
Следует заметить, что термин “объект управления” следует воспринимать в более широком смысле, чем это принято в классической теории автоматического управления. Сюда следует относить исполнительные и рабочие органы, предшествующие им усилители и преобразователи, принимая их выходные сигналы в качестве составляющих выходного вектора объекта.
Расчет и конструирование модальных регуляторов проводится в следующей последовательности. Пусть полностью управляемый и наблюдаемый объект описывается следующими уравнениями в векторно-матричной форме:
|
|
 (1.1)
(1.1)
где X – n-мерный вектор переменных состояния объекта (n – порядок объекта); Y и U – векторы выходной переменной и управления; A, B и C – матрицы соответственно коэффициентов характеристического уравнения, управления и наблюдения.
Сформируем обратную связь следующим образом:
U=K(G – LX), (1.2)
где G – вектор задающих сигналов; K – матрица коэффициентов усиления промежуточного регулятора (усилителя); L – матрица коэффициентов обратных связей. 
Тогда обобщая уравнения замкнутой системы (1.1) и (1.2) получаем
 (1.3)
(1.3)
или в виде
 (1.4)
(1.4)
где F=A – BKL.
Характеристическое уравнение полученной замкнутой системы определяется следующим образом:
D(p)=det  , (1.5)
, (1.5)
где I – единичная матрица размерности 
Поскольку собственные числа матрицы однозначно определяют коэффициенты характеристического полинома, задача может быть сформулирована следующим образом: для управляемой системы (1.1) с характеристическим полиномом  найти вектор L коэффициентов обратных связей и предварительный коэффициент усиления K, чтобы замкнутая система (1.4) имела желаемую стандартную форму характеристического полинома (1.5) с заданными коэффициентами l i.
найти вектор L коэффициентов обратных связей и предварительный коэффициент усиления K, чтобы замкнутая система (1.4) имела желаемую стандартную форму характеристического полинома (1.5) с заданными коэффициентами l i.
Процедура расчета коэффициентов l 1,..., l n проводится в следующей последовательности:
· выбираем желаемое распределение корней характеристического уравнения, то есть выбираем желаемую стандартную форму характеристического полинома замкнутой системы. С целью сокращения объема вычислений для случаев объектов высокого порядка целесообразно применить описание объекта в канонической управляемой форме Фробениуса;
|
|
· находим характеристический полином с помощью формулы (1.5);
· коэффициенты этого полинома будут зависеть от неизвестных пока параметров l i и коэффициента усиления промежуточного усилителя K;
· приравнивая коэффициенты при одинаковых степенях p полиномов, полученных на первом и втором шагах, получаем систему уравнений для определения неизвестных параметров l i. Решив ее при известных остальных параметрах системы (матрицы А,B,С), находим искомые параметры модального регулятора (элементы матрицы L). При этом К промежуточного усилителя находится из условия получения требуемых переменных состояния в установившемся режиме, т.е.  .
.
Наиболее распространенными из стандартных форм характеристического полинома являются: фильтр Чебышева, распределение Бесселя, распределение Баттерворта, биномиальное распределение, когда при порядке системы n берется характеристический полином в следующем виде:
D(p)=(p+w)n = 0, (1.6)
где w – среднегеометрический корень.
Распределение характеризуется наличием n кратных действительных и отрицательных корней, количественно равных среднегеометрическому корню. Характеристические уравнения для этого распределения имеют вид, представленный в таблице1.1.
Таблица 1.1
| Порядок системы | Время регулирования, tp | Характеристическое уравнение |
| 1 | 3/ω | D(p) = p + ω |
| 2 | 4,5/ω | D(p) = p2 + 2ω p + ω2 |
| 3 | 6/ω | D(p) = p3 + 3ω p2 + 3ω2 p + ω3 |
| 4 | 7,6/ω | D(p) = p4 + 4ω p3 + 6ω2 p2 + 4ω3 p + ω4 |
Значения коэффициентов характеристического уравнения D(p) в зависимости от порядка системы в распределении Баттерворта сведены в таблицу 1.2.
Таблица 1.2
| Порядок системы | Перерег. % | Время рег. tp | Характеристическое уравнение |
| 1 | 0 | 3/w | D(p)=p+w |
| 2 | 4,3 | 3/w | D(p)=p2+1.4wp+w2 |
| 3 | 8 | 6/w | D(p)=p3+2wp2+2w2p+w3 |
| 4 | 11 | 6,8/w | D(p)=p4+2.6wp3+3.4w2p2+2.6w3p+w4 |
При этом во всех случаях значение w выбирают исходя из требуемого быстродействия и перерегулирования системы с учетом ограничений на управление и переменные состояния.
Пример расчета модального регулятора
Рассмотрим задачу синтеза обратной связи для системы управления электроприводом перемещения. Пусть упрощенная линейная модель разомкнутой системы управления описывается дифференциальным уравнением вида

где: Т – постоянная времени привода, учитывающая его инерционность; к – общий статический коэффициент передачи канала управления; j и w – соответственно угол поворота и угловая скорость электродвигателя; u - управляющий сигнал (напряжение управляемого источника питания).
|
|
Переходя к изображениям по Лапласу, получим

где к1×к2 = к. Представим объект управления структурной схемой в виде последовательного соединения апериодического и интегрирующего звеньев рис.1.1.

Рис.1.1
Уравнения объекта в скалярной форме будут иметь вид
Здесь  - переменная состояния, пропорциональная углу поворота электропривода;
- переменная состояния, пропорциональная углу поворота электропривода;  - переменная состояния, пропорциональная угловой скорости электропривода.
- переменная состояния, пропорциональная угловой скорости электропривода.
Уравнение объекта в векторно-матричной форме согласно (1.1)

Отсюда находим



Корни характеристического уравнения разомкнутой системы  следовательно, объект управления является нейтральным. Для обеспечения заданного перемещения введем линейные обратные связи по углу и угловой скорости
следовательно, объект управления является нейтральным. Для обеспечения заданного перемещения введем линейные обратные связи по углу и угловой скорости
u (t) = – l 1 x 1(t) – l 2 x 2(t) + k 0 g (t),
где g – задаваемое значение перемещения.
Тогда замкнутая система с модальным управлением будет иметь вид, показанный на рис.1.2.
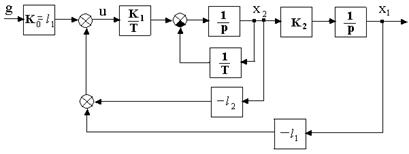
Рис.1.2
Она описывается дифференциальными уравнениями в скалярной форме
 (1.7)
(1.7)
Коэффициент усиления предварительного усилителя К0 найдем из условия обеспечения установившегося перемещения (заданного), т.е. y=x1=g. При этом

Тогда из уравнения (1.7) получим К0 = l1.
Характеристическое уравнение замкнутой САУ с неизвестными параметрами li модального регулятора найдем из уравнения (1.7)
 (1.8)
(1.8)
Если для САУ второго порядка принять коэффициенты желаемого характеристического уравнения (1.7) в соответствии с распределением Баттерворта, т. е.
D(p) = p2 +1,4 w p + w2 = 0 и tp =3/w, (1.9)
то предварительно задавшись требуемым временем переходного процесса tp, приравнивая коэффициенты при одинаковых степенях оператора р в уравнениях (1.8) и (1.9), получим следующие коэффициенты обратных связей (модального регулятора):
|
|

 (1.10)
(1.10)
Если для САУ второго порядка принять коэффициенты желаемого характеристического уравнения (1.7) в соответствии с биномиальным распределением, т. е.
D(p) = p2 +2 w p + w2 = 0 и tp @ 3/w, (1.11)
то предварительно задавшись требуемым временем переходного процесса tp, приравнивая коэффициенты при одинаковых степенях оператора р в уравнениях (1.8) и (1.11), получим следующие коэффициенты обратных связей (модального регулятора):

 (1.12)
(1.12)
Для приведенной САУ модального управления примем следующие значения параметров: T=0,2 c.; k1=10; k2=0,1; tp=0,3 c. Тогда коэффициенты обратных связей модального регулятора, рассчитанные по формулам (1.10) и (1.12), будут иметь значения:
- для биномиального распределения - l1= 20; l2= 0,3;
- для распределения Баттерворта - l1= 20; l2= 0,18.
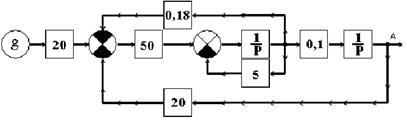
Рис.1.3
На рис.1.3 приведена схема модели системы управления с модальным регулятором, настроенным на распределение Баттерворта.
На рис. 1.4 приведены результаты моделирования САУ с модальным управлением в среде пакета прикладных программ SyAn. На графиках приведены переходные процессы при g(t) = 1 для биномиального распределения (рис.1.4,а) и для распределения Баттерворта (рис.1.4,б).
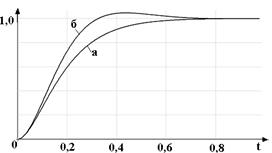
Рис.1.4
При использовании распределения Баттерворта время переходного процесса меньше, чем при использовании биномиальной настройки, но в тоже время появляется перерегулирование. При использовании биномиальной стандартной настройки и стандартного распределения Баттерворта ошибка системы регулирования с нейтральным объектом стремится к нулю. В обоих случаях быстродействие выше, чем при классических оптимальных настройках регуляторов (модульной и симметричной).
|
|
|

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...
Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!