Плоская система сходящихся сил находится в равновесии, если алгебраическая сумма проекций всех сил системы на любую ось равна нулю.
{  .
.
В задачах координатные оси выбирают так, чтобы хотя бы одна неизвестная сила совпадала с осью координат.
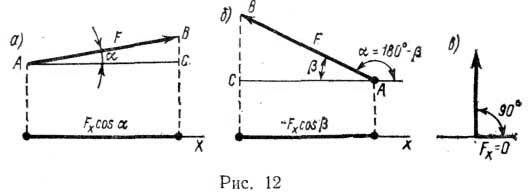
Проекция силы на ось определяется отрезком оси, отсекаемым перпендикулярами, опущенными на ось из начала и конца вектора.
Величина проекции силы на ось равна произведению модуля силы на косинус угла между вектором силы и положительным направлением оси. Проекция имеет знак: положительный при одинаковом направлением вектора силы и оси и отрицательный - при направлении в сторону отрицательной полуоси (рис. 8).
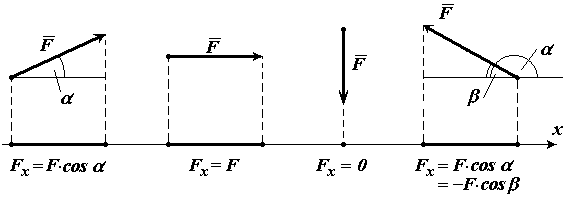
Рисунок –8 Определение проекции силы на ось
Примеррешения задачи
Стержни АС и ВС (рис. 9,а) соединены между собой шарниром С, а с вертикальной стеной — посредством шарниров А и В. В шарнире С приложена сила F = 1260 Н. Требуется определить реакции N 1 и N 2 стержней действующие на шарнир С, если  = 30° и
= 30° и  = 60°.
= 60°.
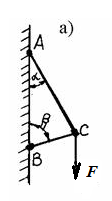
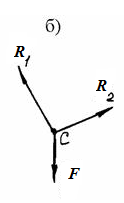

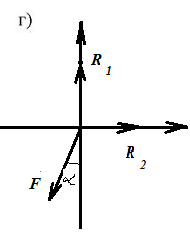
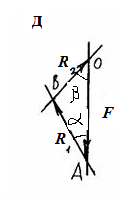
Рисунок - 9 Схема решения задачи
Решение
Рассматриваем равновесие точки С, которая считается несвободной, так как на нее наложены связи в виде стержней АС и ВС. Освобождаем точку С от связей и заменяем их силами реакций связей, считая, что стержень АС растягивается, а стержень ВС сжимается под действием силы F. Обозначим реакцию стержня АС через R 1, а реакцию стержня ВС через R 2. В итоге точка С становится свободной, находясь под действием плоской системы трех сходящихся сил: активной силы F и сил реакций R 1 и R 2 (рис. 9, б). Приняв точку О за начало координат, перенесем силы F, R 1 и R 2 параллельно самим себе в эту точку (рис. 9, в). Совместим реакциюR1 с осью у, соответственно (рис.9а) расположим и остальные силы (рис.9,г). Составляем уравнения проекций сил на оси координат:
∑Х=0; R2 -F  cos
cos  =0,
=0,
∑Y=0; R1  cos300=0.
cos300=0.
Из первого уравнения находим R2, а из второго R1.
R2= F cos ,
R2=1260 0,5=630Н,
R1=  cos300,
cos300,
R1=1260 
.
Сделаем проверку решения задачи с помощью теоремы синусов.
 =
=  =
=  ,
,
 =1800-(300+600)=900,
=1800-(300+600)=900,
R1=  =
=  =1089,9 Н,
=1089,9 Н,
R2=  =630 Н.
=630 Н.
Графический метод
Для решения задачи этим методом выбираем масштаб силы F (например, 10 Н = 1 мм) и строим замкнутый треугольник сил (рис. 9, д). Из произвольной точки О проводим прямую, параллельную вектору F, и откладываем на этой прямой в выбранном масштабе вектор F. Из конца вектора F (точка А) проводим прямую, параллельную вектору R1, а из точки О — прямую, параллельную вектору R2. Пересечение этих прямых дает точку В. Получили замкнутый треугольник сил ОАВ, стороны которого в выбранном масштабе изображают силы, сходящиеся в точке С. Величины сил R 1и R2 определим после измерения сторон АВ и ВО треугольника ОАВ.
Ответ: N 1 = 1089,9 H; N 2 = 630 H
Содержание отчета:
1. Титульный лист в соответствии СТП 1.2-2005
2. Цель работы
3. Задание
4. Определение величины и направления реакций связей по заданному варианту в аналитической форме.
5. Проверка решения
6. Ответы на контрольные вопросы
7. Вывод
Контрольные вопросы:
1. Как целесообразно располагать оси координат относительно сил, образующих плоскую систему сходящихся сил
2. Сформулируйте аналитическое условие равновесия плоской системы сходящихся сил
3. Чем принципиально отличаются: реакция нити и реакция стержня с шарнирами на концах
4. Сколько неизвестных может быть определено из условия равновесия для твердого тела, находящегося под действием плоской системы сходящихся сил
5. Перечислите способы проверки решения по определению величины и направления реакций связи. Укажите, какой из них наиболее точный
Практическая работа № 3
Тема: Определение главного вектора и главного момента произвольной плоской системы сил
Цель работы: научиться определять главный вектор и главный момент произвольной плоской системы сил
Задание:
1. Определить главный вектор системы
2. Определить главный момент системы относительно точки В
3. Письменно ответить на контрольные вопросы
Схема задачи, величины углов и величина силы тяжести груза указаны на рисунке в соответствии с порядковым номером.
1 2
3 4
5 6
7 8
9 10
11 12
13 14
17 18
19 20
21 22
23 24
25 26
27 28
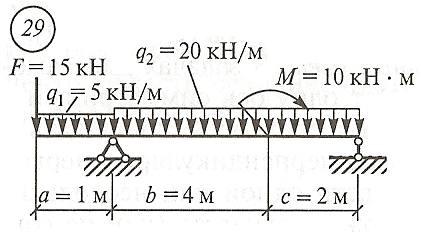
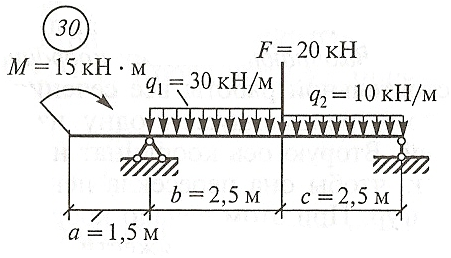
29 30
| НОМЕР ВАРИАНТА
ПАРАМЕТРЫ
| Номер схемы
|
F1,кН
|
F2,кН
|
F3,кН
|
F4,кН
|
F5,кН
|
АВ,
СД,
м
|
ВС,
АД,
м
|
α1
|
α2
|
| 1
| 2
| 3
| 4
| 5
| 6
| 7
| 8
| 9
| 10
| 11
|
| 1
| 1
| 10
| 15
| 20
| 25
| 10
| 3
| 4
| 30
| 45
|
| 2
| 2
| 15
| 10
| 20
| 25
| 10
| 4
| 3
| 60
| 30
|
| 3
| 3
| 25
| 10
| 10
| 20
| 20
| 5
| 5
| 30
| 30
|
| 4
| 4
| 10
| 15
| 10
| 15
| 15
| 6
| 4
| 45
| 45
|
| 5
| 5
| 25
| 25
| 15
| 15
| 20
| 4
| 6
| 15
| 45
|
| 6
| 6
| 20
| 20
| 25
| 15
| 15
| 3
| 5
| 25
| 45
|
| 7
| 7
| 25
| 25
| 15
| 15
| 10
| 4
| 6
| 30
| 60
|
| 8
| 8
| 15
| 20
| 20
| 15
| 15
| 3
| 7
| 25
| 50
|
| 9
| 9
| 20
| 25
| 25
| 15
| 10
| 4
| 6
| 45
| 60
|
| 10
| 10
| 10
| 15
| 25
| 25
| 20
| 5
| 7
| 45
| 45
|
| 11
| 11
| 25
| 25
| 20
| 15
| 15
| 4
| 6
| 45
| 30
|
| 12
| 12
| 15
| 15
| 15
| 15
| 25
| 5
| 8
| 30
| 60
|
| 13
| 13
| 10
| 10
| 20
| 20
| 10
| 4
| 8
| 25
| 50
|
| 14
| 14
| 15
| 15
| 15
| 25
| 25
| 3
| 6
| 30
| 45
|
| 15
| 15
| 25
| 20
| 20
| 20
| 15
| 5
| 8
| 50
| 75
|
| 16
| 16
| 25
| 20
| 10
| 15
| 10
| 4
| 7
| 45
| 30
|
| 17
| 17
| 10
| 15
| 15
| 10
| 10
| 3
| 8
| 45
| 60
|
| 18
| 18
| 15
| 15
| 20
| 25
| 25
| 5
| 10
| 45
| 45
|
| 19
| 19
| 10
| 15
| 10
| 20
| 20
| 4
| 7
| 25
| 50
|
| 20
| 20
| 15
| 15
| 15
| 20
| 20
| 4
| 6
| 30
| 45
|
| 1
| 2
| 3
| 4
| 5
| 6
| 7
| 8
| 9
| 10
| 11
|
| 21
| 21
| 20
| 20
| 15
| 15
| 15
| 3
| 7
| 45
| 45
|
| 22
| 22
| 10
| 15
| 15
| 20
| 20
| 4
| 6
| 60
| 45
|
| 23
| 23
| 15
| 15
| 20
| 20
| 25
| 3
| 7
| 30
| 45
|
| 24
| 24
| 20
| 20
| 15
| 15
| 10
| 6
| 8
| 25
| 45
|
| 25
| 25
| 15
| 15
| 25
| 25
| 20
| 4
| 7
| 30
| 45
|
| 26
| 26
| 20
| 20
| 25
| 15
| 15
| 4
| 8
| 30
| 45
|
| 27
| 27
| 15
| 15
| 20
| 10
| 15
| 3
| 8
| 25
| 50
|
| 28
| 28
| 10
| 10
| 15
| 15
| 10
| 4
| 6
| 30
| 30
|
| 29
| 29
| 25
| 25
| 20
| 20
| 10
| 4
| 8
| 45
| 45
|
| 30
| 30
| 10
| 10
| 25
| 25
| 25
| 4
| 6
| 30
| 60
|
Пример решения задачи
Найти главный вектор и главный момент системы относительно точки В, если F
1=10кН;F
2=16кН;F
3=12кН; α=45
0, АД=ВС=4м, АВ=ДС=2м.
Поместим начало осей координат в точке В. Определим проекции всех сил системы на ось Х и на ось У.
Fгл=∑Fкх;
F1x=F1∙cos450
F2x=−F2
F3x=0
Fгл=F1∙cos450−F2=−9кН;
Fглу=∑Fky;
F1y=−F1∙cos450;
F2y=0;
F3y=F3;
Fглу=−F1∙cos450+F3=5кН.
Главный вектор равен геометрической сумме сил:
Fгл=√Fглх2+Fглу2;
Fгл=√(−9)2+52=10 кН.
Главный момент равен алгебраической сумме моментов сил относительно точки приведения В:
Мгл=∑ m B(Fk);
m B(F1)=F1∙sin450;
m B(F2)=−F2∙2;
m B(F3)=−F3∙4;
∑ m B=F1∙2∙sin450 – F2∙2 – F3∙4;
Мгл=10∙2∙0,7 − 16∙2 - 12∙4=−6кН∙м.
Содержание отчета:
1. Титульный лист в соответствии СТП 1.2-2005
2. Цель работы
3. Задание
4. Определение главного вектора и главного момента произвольной плоской системы сил.
5. Ответы на контрольные вопросы
6. Вывод
Контрольные вопросы:
1. Чем отличается главный вектор от равнодействующей плоской системы произвольно расположенных сил?
2. В каком случае центр приведения при определении главного момента значения не имеет и какими при этом будут результаты?
3. В каком случае систему сил нельзя привести к равнодействующей?
4. Сколько независимых уравнений моментов и при каком условии можно составить на плоскости?
5. Тело вращается вокруг неподвижной оси. Чему равны главный вектор и главный момент действующей на него системы сил?
Практическая работа № 4
Тема: Определение реакций в опорах балочных систем с проверкой правильности решения
Цель работы: научиться определять реакции в опорах балочных систем, при различном нагружении балок и производить проверку правильности решения
Задание:
1. Определить реакции в опорах балочных систем.
2. Произвести проверку правильности решения.
3. Письменно ответить на контрольные вопросы.
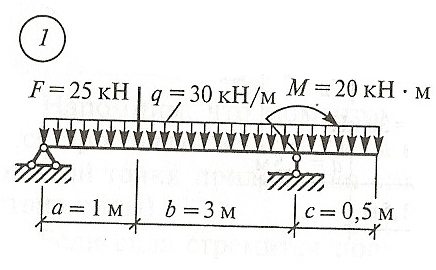
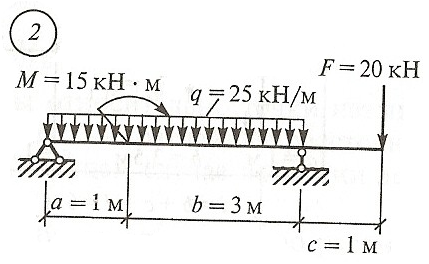
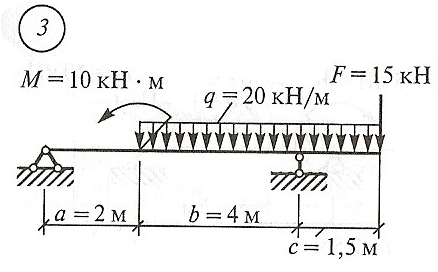
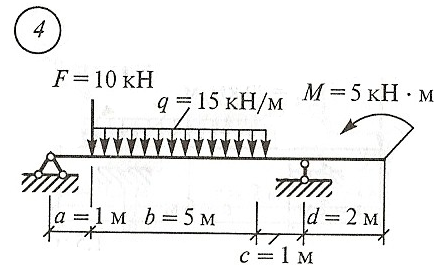
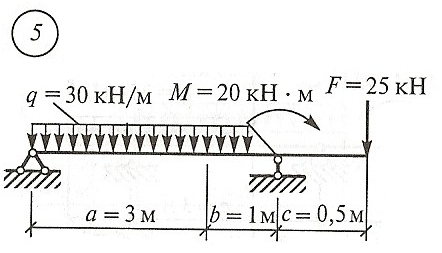
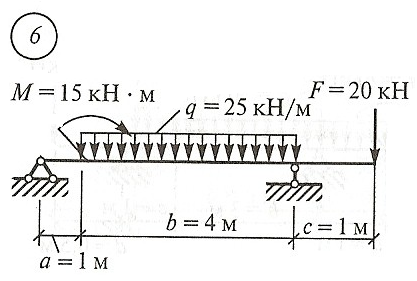
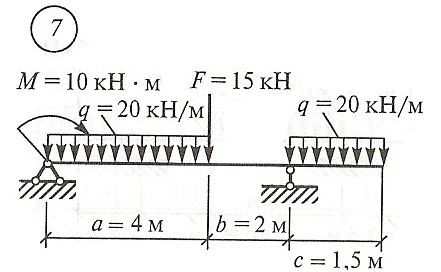
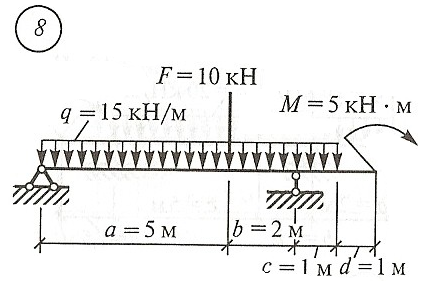
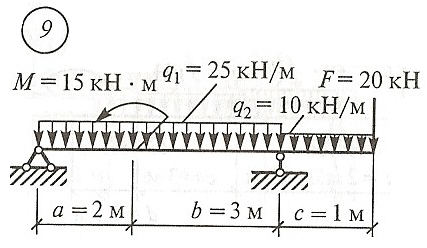
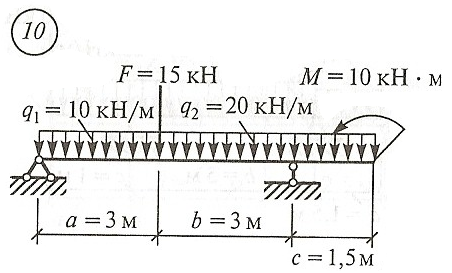
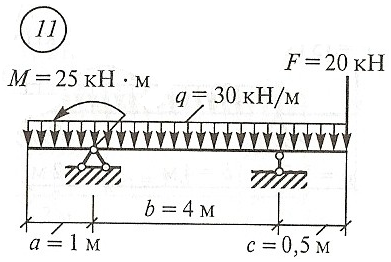
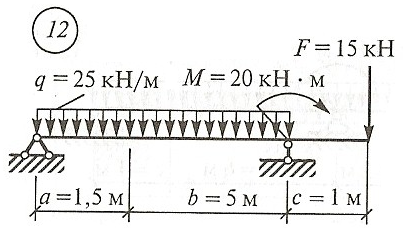
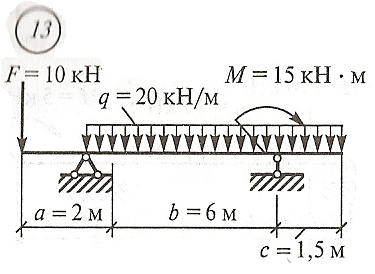
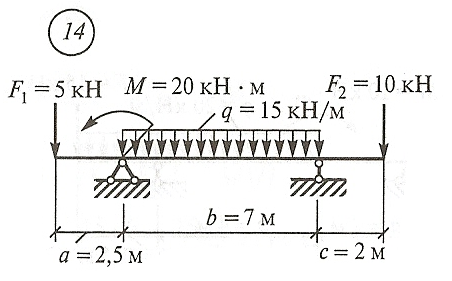
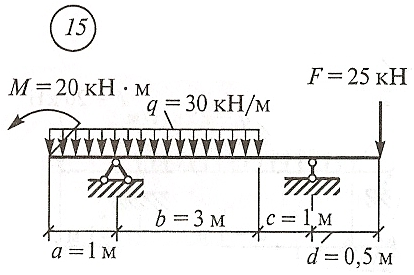
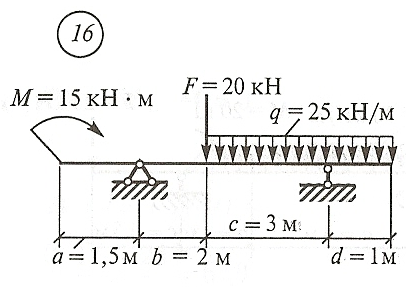
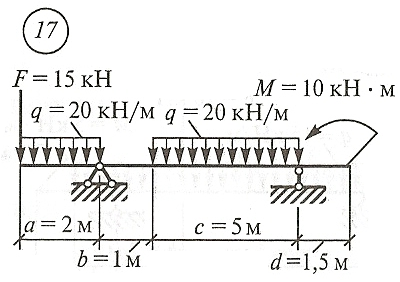
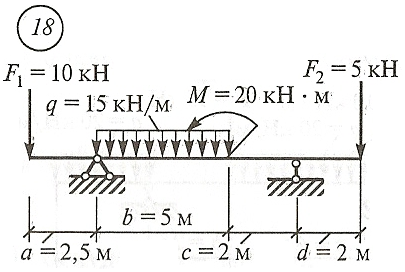
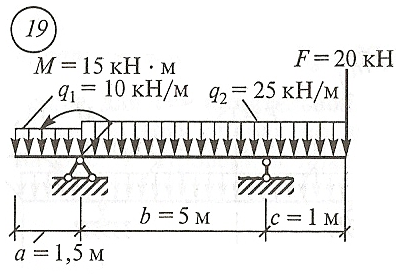
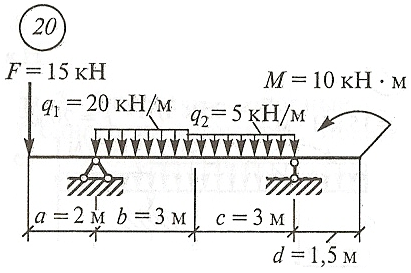
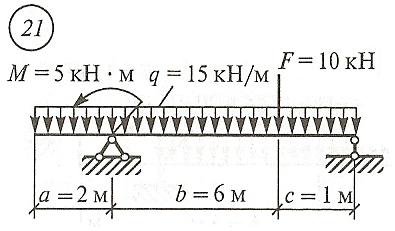
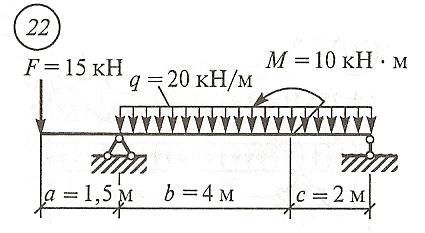
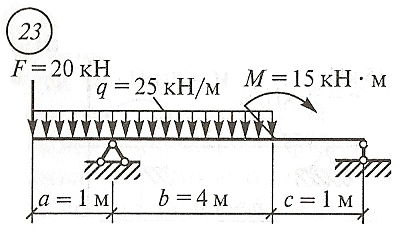
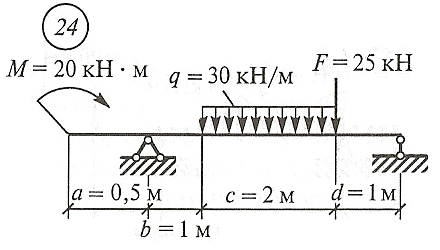
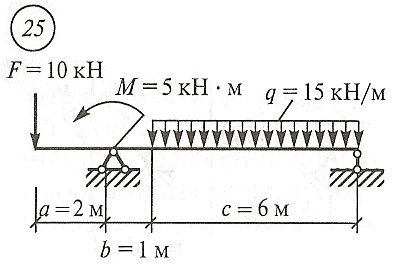
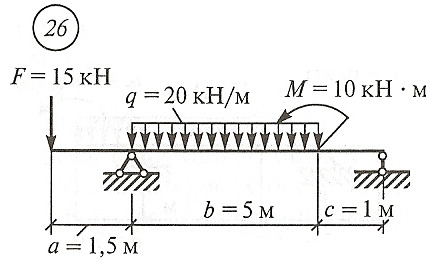
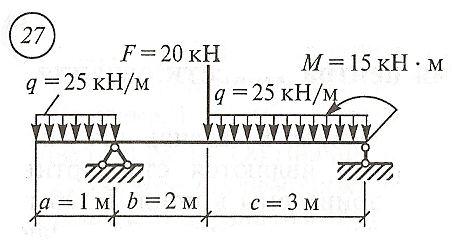
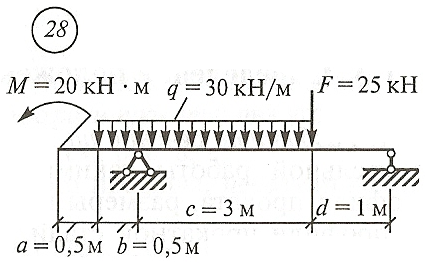
Схема балки, ее размеры и величины действующих на балку нагрузок указаны в таблице 1 в соответствии с порядковым номером по журналу.
Таблица 1
Схемы балок

Пояснения к работе:
Для решения задач на равновесие плоской системы сил можно пользоваться любой формой уравнений равновесия. Целесообразно составлять уравнения так, чтобы они были решены наиболее просто и быстро. Каждое из уравнений равновесия должно содержать одну неизвестную. К такой системе можно прийти при соответствующем выборе координатных осей и центров моментов.
В качестве центров моментов рекомендуется выбирать точку опоры, так как уравнение моментов относительно этой точки содержит одну неизвестную. Направление координатных осей следует выбирать так, чтобы одна из осей была перпендикулярна некоторым неизвестным силам, а при проектировании этих сил на эту ось в уравнение они не войдут. (Ось следует направлять вдоль балки, а ось – из крайней левой точки балки.). Определение неизвестных величин лучше начинать с уравнений проекций, а затем переходить к уравнениям моментов. При этом можно избежать совместного решения уравнений и уменьшить вероятность ошибок. Все аксиомы и положения статики устанавливаются для сосредоточенных сил. Если на балку действует распределенная нагрузка, то ее необходимо заменить на равнодействующую сосредоточенную нагрузку.
Если в состав плоской системы сил, действующих на находящееся в равновесии тело, входит момент сил (пара сил), то, алгебраическая сумма проекций сил любой пары на любую ось равна нулю (так как пара всегда представляет собой систему двух равных по модулю, параллельных и противоположно направленных сил).
Проекция силы на ось определяется отрезком оси, отсекаемым перпендикулярами, опущенными на ось из начала и конца вектора.
Величина проекции силы на ось равна произведению модуля силы на косинус угла между вектором силы и положительным направлением оси. Проекция имеет знак: положительный - при одинаковом направлением вектора силы и оси и отрицательный - при направлении в сторону отрицательной полуоси (рис. 1).
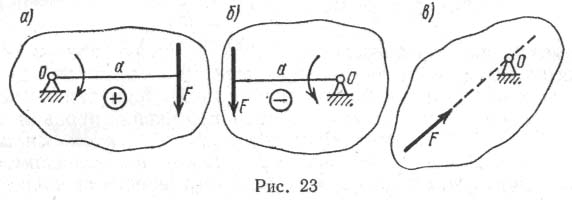
Момент силы относительно точки численно равен произведению модуля силы на расстояние от точки до линии действия силы. Перпендикуляр, опущенный из точки на линию действия силы, называется плечом силы.
Момент считается положительным, если сила разворачивает тело по часовой стрелке (рис.2а, 2б).
Момент силы относительно точки равен нулю, если линия действия силы проходит через точку, т.е. в этом случае расстояние от точки до силы равно нулю (рис.2в).
Очень часто в машинах и конструкциях встречаются тела удлиненной формы, называемые балками (или балочными системами). Балки в основном предназначены для восприятия поперечных нагрузок. Балки имеют специальные опорные устройства для сопряжения их с другими элементами и передачи этих усилий. Применяются следующие виды опор.
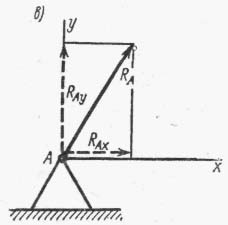
Шарнирно-подвижная опора допускает поворот вокруг шарнира и перемещение вдоль опорной поверхности. Реакция направлена перпендикулярно опорной поверхности.
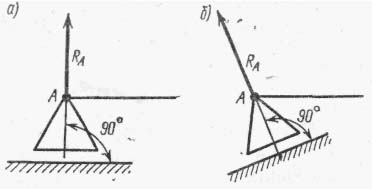
Шарнирно-неподвижная опора допускает поворот вокруг шарнира и может быть заменена двумя составляющими силы вдоль осей координат
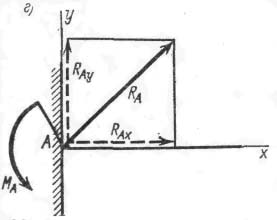
Жесткая заделка (защемление). Опора не допускает перемещений и поворотов. Заделку заменяют двумя составляющими силы и парой с моментом
Алгебраическая сумма проекций всех сил системы на ось Х должна быть равна нулю:
∑X=0.
Алгебраическая сумма проекций всех сил системы на ось Y должна быть равна нулю:
∑Y=0.
Алгебраическая сумма моментов всех сил системы относительно опоры в точке А должна быть равна нулю:
∑MА=0.
Алгебраическая сумма моментов всех сил системы относительно опоры в точке В должна быть равна нулю:
∑MВ=0.
Пример решения задачи
Определить реакции в опорах для балки
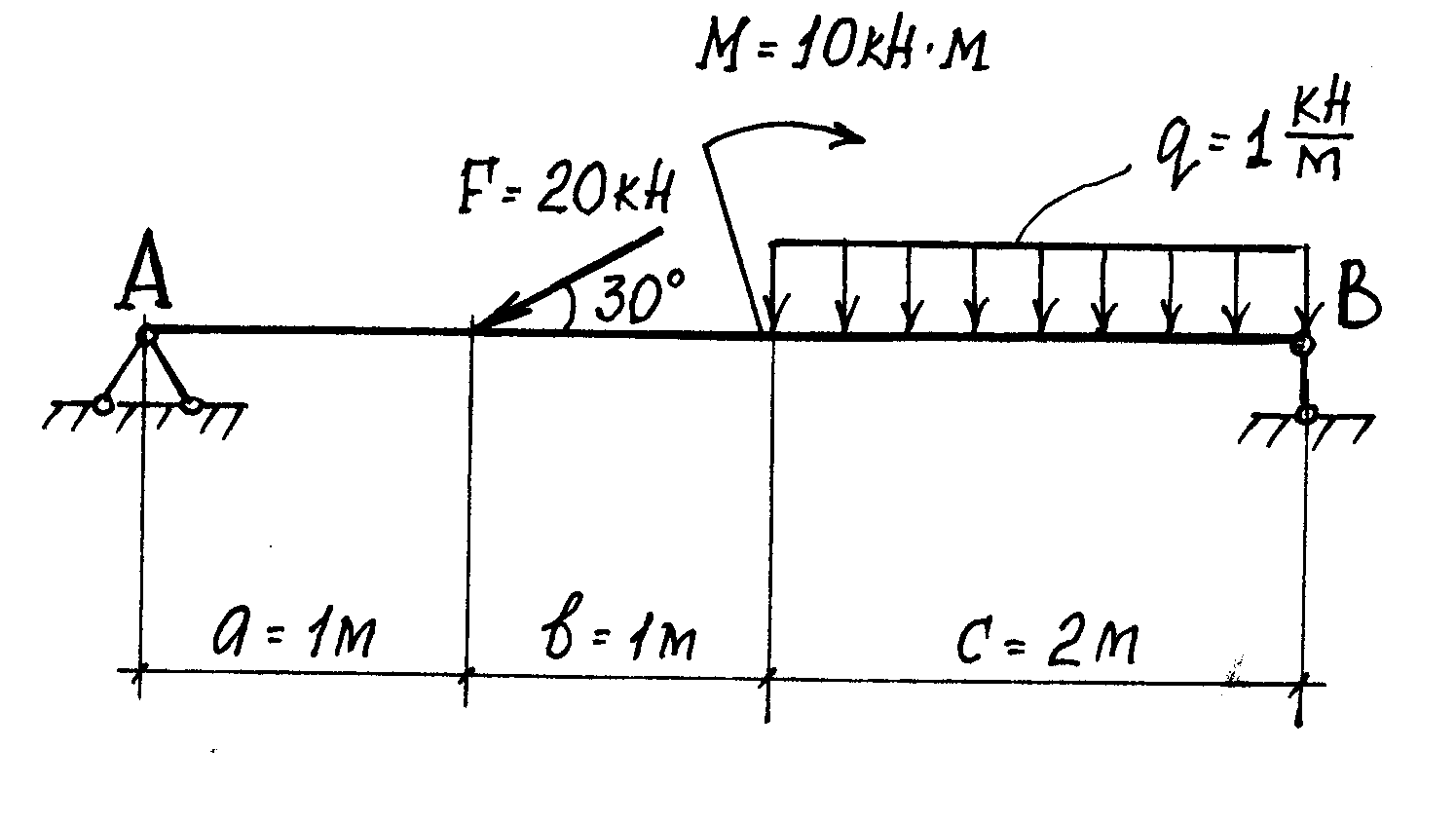
Рисунок – 1. Схема балки
Решение:
Рассматриваем равновесие балки АВ. Освобождаем балку от опор и заменяем их действия реакциями
Левая опора (точка А) – шарнирно-неподвижная опора (неподвижный шарнир), заменяем ее на две составляющие реакции по оси Х и по оси Y.
Правая опора (точка В) – шарнирно-подвижная опора, заменяем ее на реакцию направленную перпендикулярно опорной поверхности.
Равномерно распределенную нагрузку заменим равнодействующей, приложенной посередине пролета длиной с=2м.
Направим оси координат таким образом, что начало координат будет в точке А, ось Х – горизонталь, совпадает с балкой АВ, ось Y – вертикаль.
Разложим силу F на горизонтальную и вертикальную составляющие, т.е. спроектируем ее на оси X и Y.
Получим силовую схему (рис.2).
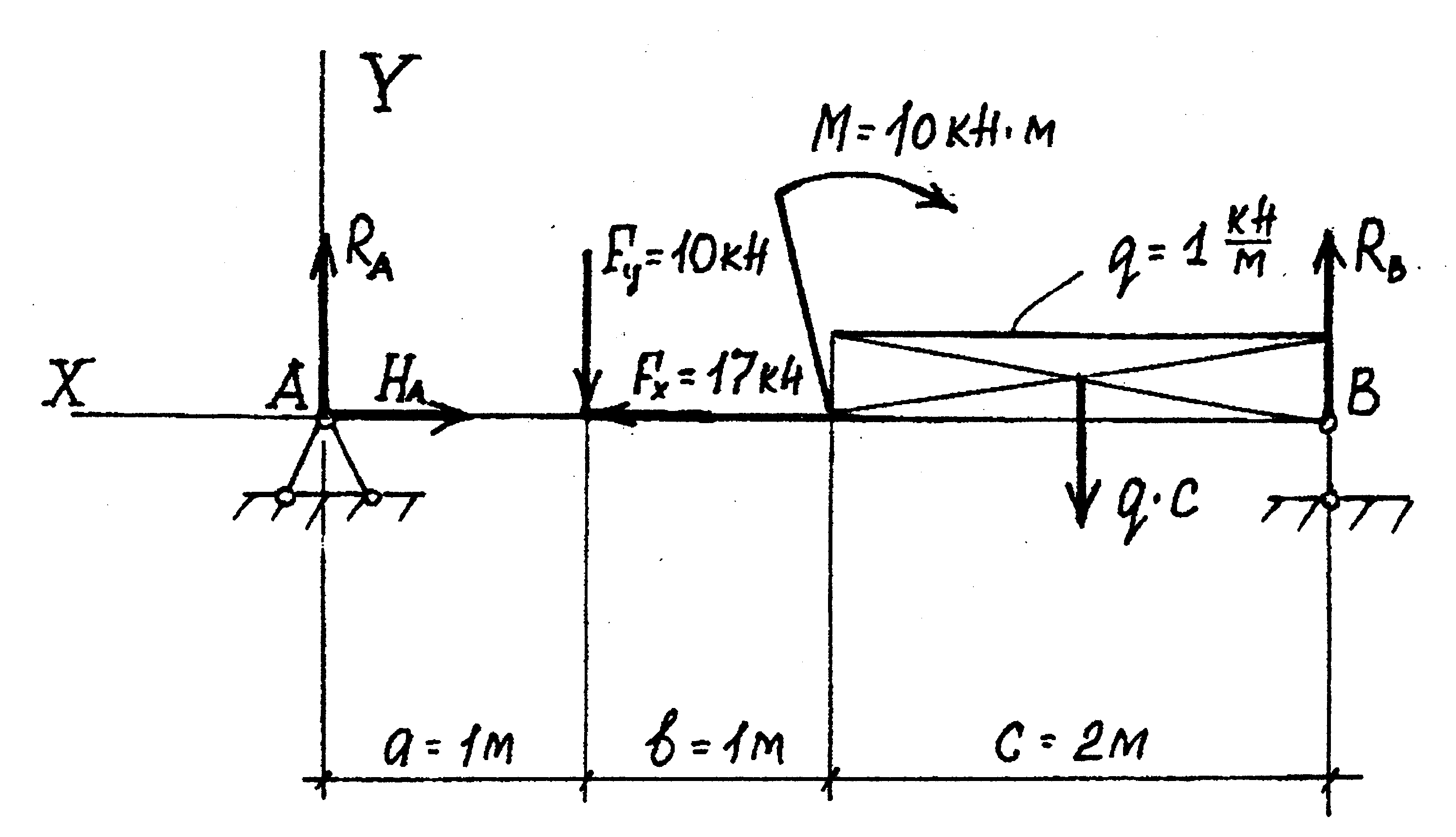
Рисунок – 2. Силовая схема
Определим проекцию силы F на ось Х:
Fx = F . cos 30 о,
Fx=20.cos 300=20 . 0,87=17 кН.
Определим проекцию силы F на ось Y:
Fy = F . sin 30о,
Fy=20.sin 300=20 .0,5 = 10кН.
Составляем уравнения равновесия для данной системы.
Составим уравнение проекций всех сил системы на ось Х, для этого спроектируем все силы на эту ось. Получим следующее уравнение:
 Х = 0, Fx – HA=0, 17-HA=0, HA=17 кН.
Х = 0, Fx – HA=0, 17-HA=0, HA=17 кН.
Составим уравнение моментов всех сил системы относительно точки А:
МА=Fy. а +М-RВ(а+в+с)+ q . с(а+в+  )=0.
)=0.
Подставим числовые значения и определим из этого уравнения реакцию RВ:
10.1+10-RВ(1+1+2)+1.2(1+1+  )=0,
)=0,
-RВ.4+26=0, RВ=6,5 кН
Составим уравнение моментов всех сил системы относительно точки В:
МВ= - q . c .  +М-Fy(c +в)+RА(а+в+с)=0.
+М-Fy(c +в)+RА(а+в+с)=0.
Подставим числовые значения и определим из этого уравнения реакцию RА:
-1.2.  +10-10(2+1)+RА(1+1+2)=0,
+10-10(2+1)+RА(1+1+2)=0,
RА.4-22=0, RА=5,5 кН
Все значения реакций опор получились положительными, значит направление этих реакций выбрано верно.
Произведем проверку правильности решения. Для этого составим уравнение проекций всех сил системы на ось Y, алгебраическая сумма проекций всех сил системы должна быть равна нулю:
Y = 0, RA+RB-Fy- q . c =0.
Подставим числовые значения:
5,5+6,5-10-1.2=0, 0=0.
Условие равновесия выполняется, следовательно, реакции опор найдены верно.
Содержание отчета:
1. Титульный лист в соответствии СТП 1.2-2005
2. Цель работы
3. Задание
4. Определение величины и направления реакций связей по заданному варианту в аналитической форме.
5. Проверка решения
6. Ответы на контрольные вопросы
7. Вывод
Контрольные вопросы:
1. Как определяется момент силы относительно точки?
2. Что называется проекцией силы на ось?
3. Как определяется величина и направление проекции силы?
4. В каких случаях получается момент положительный, отрицательный и равный нулю?
5. Как определяют опорные реакции в балках?
Лабораторная работа № 1
Тема: Определение центра тяжести плоской фигуры
Цель работы: научиться определять центр тяжести плоской фигуры аналитически и практически
Задание:
1. Начертить заданную фигуру, выданную преподавателем по варианту, в масштабе 1:1, с указанием размеров. Проставить номера простых фигур и обозначить их координаты центров тяжести и заполнить таблицу 2
2. Вычислить координаты центра тяжести Хс и Усвсей фигуры по формулам 1 и 2. Положение центра тяжести нанести на чертеж фигуры
3. Определит