Техники на судах
Ставший уже обычным объем автоматизации на вновь строящихся судах предусматривает автоматическое удержание судна на заданном постоянном курсе, централизованное управление судовыми системами, ДАУ ГД с мостика, возможность эксплуатации СЭУ без постоянной вахты в МО и т.д. Подобный объем автоматизации предусмотрен практически на всех судах новой постройки.
На многих судах находят применение новые средства автоматики и автоматизированное оборудование, которые освобождают, например, судоводителя от выполнения значительного объема расчетов, связанных с определением географических координат фактического местоположения судна, предварительной прокладки его пути, выбора маневра для безопасного расхождения со встречными судами, наивыгоднейшего маршрута плавания и т. д.
Автоматическое удержание судна на заданном курсе осуществляется с более высоким качеством, в то же время при более экономичной работе рулевого устройства, благодаря применению самонастраивающихся авторулевых. Внедряются системы автоматического ведения судна по заданной траектории в открытом море.
Автоматизированы дистанционное управление механизмами якорного и швартовного устройств, централизованное управление люковыми закрытиями. Автоматически производятся мойка верхней палубы (на балкерах, углевозах и т. п.); управление балластной системой с целью поддержания нормальной посадки судна во время грузовых операций (преимущественно на контейнеровозах и на судах с горизонтальной грузообработкой); расчеты остойчивости судна и усилий в связях корпуса при различной планировке расположения груза (в основном на контейнеровозах и судах для массовых грузов) и т.д.
Среди новых средств автоматики заметное место занимают устройства и системы, позволяющие выбирать выгоднейшие режимы работы ГД в меняющихся условиях эксплуатации, а также оптимально планировать техническое обслуживание установки. С этой целью постоянно замеряются такие параметры, как частота вращения гребного вала, скорость судна, мощность и момент на валу, расход топлива ГД и т.п., и на основании этого рассчитывают расход топлива на единицу затраченной энергии, на милю пройденного пути и т.д.
Другие средства осуществляют контроль технического состояния оборудования СЭУ с выявлением характера и тенденций изменения его рабочих параметров. Все чаще основной объем оперативного управления и контроля СЭУ переносится из МО на мостик, где вместе с постом ДУ судовыми системами создается общий центр управления и контроля всех технических средств судна.
Сегодня на судах мирового флота эксплуатируются новейшие технические средства автоматизации судов, например, системы ДАУ, срабатывающие от речевых команд оператора с мостика ГД (на японских балкерах «Кинокава мару» и «Цукуба мару»), швартовными лебедками («Цукуба мару») и рулевым устройством (японский балкер «Ривер стар»); система автоматической передачи по радио в любой момент по запросу судовладельца сведений о технико-экономических показателях работы СЭУ и координатах судна в данный момент (голландские рефрижераторные суда «Наутик», «Нормандия» и др.) и ряд других. Успехи автоматизации во многом способствуют уменьшению численности экипажей на грузовых судах.
Появление надежных и эффективных средств вычислительной техники (СВТ) позволило ускорить централизацию управления судном в целом и всеми его ТС. В ряде стран (Япония, Германия, Норвегия, Франция, Великобритания) осуществляются широкие программы научно-исследовательских и опытно-конструкторских работ (НИОКОР) в обеспечении создания так называемого судна будущего, представляющего собой единый автоматизированный комплекс, полностью управляемый и контролируемый из одного общесудового центра управления на мостике. Благодаря этому ограниченное число людей, находящихся на нем, смогут обеспечить выполнение судном всех функций в полном объеме (при минимальных затратах времени на обслуживание судового оборудования и высокой надежности). В Японии рассматривается вопрос о целесообразности создания судов-«роботов», не имеющих экипажа вообще.
Развитие СВТ способствует решению задач по автоматизации административно-хозяйственных функций экипажа, контроля с берега за эксплуатацией судна и обмена отчетно-управленческой информацией с берегом. Это ведет к централизации управления всем флотом со стороны судовладельческой компании и превращению его в единую транспортную систему, оперативно управляемую из одного центра с помощью соответствующей АСУ. Важную роль в реализации этого направления играют космические средства связи.
Как отмечалось выше, сейчас практически не разрабатывается ни одной новой судовой системы управления и контроля, не имеющей в своем составе СВТ, главным образом микропроцессоров. В составе различных САУ на одном современном судне могут оказаться более 50 микропроцессоров и микроЭВМ.
Применение вычислительной техники позволяет:
- реализовать на судах ряд рабочих процессов, технически неосуществимых без быстрого выполнения большого объема вычислений (например, определение места судна с помощью искусственных спутников Земли (ИСЗ), динамическая стабилизация судна или плавающих буровых установок на точке работ);
- значительно расширить возможности всех средств управления судном и его оборудованием, а также средств контроля;
- увеличить универсальность и гибкость в эксплуатации САУ и контроля;
- значительно улучшить массогабаритные характеристики судовой аппаратуры и систем автоматизации;
- повысить экономическую эффективность эксплуатации судовых ТС благодаря оперативному расчету текущих значений их технико-экономических показателей работы;
- добиться высокой степени унификации и стандартизации аппаратуры судовой автоматики;
- упростить пользование средствами управления и контроля на судах и их обслуживание.
Вычислительная техника широко используется в средствах навигации, адаптивных авторулевых, радиолокационных станциях, радионавигационных системах и др. Разработаны и применяются навигационно-вычислительные комплексы, решающие целый круг навигационных задач, направленных на повышение безопасности плавания. Применение СВТ в системах управления и контроля за грузовыми операциями позволяет в первую очередь оперативно выполнять расчеты остойчивости и прочности судна при различных условиях его загрузки, определять оптимальную дифферентовку судна при любом заданном его водоизмещении (с точки зрения минимизации расхода топлива в плавании), выбирать оптимальную схему крепления палубных контейнеров и т.д.
СВТ используют также и в системе централизованного контроля количества груза на наливных судах, особенно там, где установлены ультразвуковые или микроволновые датчики.
Наиболее сложный класс средств автоматизации грузовых операций образуют системы автоматического управления и контроля грузовых систем и устройств. Автоматизация СЭУ, ЭЭС, общесудовых систем открывает широкие возможности для эффективного применения СВТ в связи с большим разнообразием, сложностью и энергоемкостью осуществляемых технологических процессов.
На базе рассмотренной системы ДАУ ГД FAMP-S в Дании выпущена система ДАУ ГД «Альфатроник III» для одно- и многомашинных дизель-редукторных установок с ВРШ и ВФШ. В системе использованы МКП и единая импульсная линия последовательной передачи данных, соединяющая панели управления, центральный вычислительный блок и блоки управления
1. Регулятор частоты вращения ГД DEGO (фирма ASEA, Швеция). Система DEGO-S и ее модификация DEGO-II поддерживают заданную частоту вращения дизеля с точностью ±1 %. В ней (рисунок 7.6) использованы импульсные датчики частоты вращения (ДЧВ) 1, выходные сигналы которых преобразуются в преобразователях (Пр) 2 в постоянные сигналы х1 и х2 и через максимальный селектор 3 сравниваются с задающим сигналом хзд из системы ДАУ в дифференциальном усилителе (ДУ). Сигнал ошибки Δ х=х1 — хзд. (или х2 — хзд)поступает в микроконтроллер 6, где формируется управляющий сигнал хупр. Система устроена таким образом, что при совпадении фактической и заданной частоты вращения коэффициент усиления контура невелик и обеспечивает плавное изменение сигнала хупр и регулирование ИД (рисунок 7.7, кривая 1). Если отклонение фактического значения параметра от заданного превышает некоторый предел Δ x пр1, коэффициент усиления микроконтроллера увеличивается, сигнал хупр также увеличивается, ускоряя воздействие на топливоподачу и соответственно на частоту вращения. Предельное значение Δ x пр2 может меняться (рисунок 7.7, кривая 2), оставляя практически неизменной топливоподачу в пределах 2  , при этом уменьшается расход топлива при частых изменениях частоты вращения гребного вала, например, при волнении моря.
, при этом уменьшается расход топлива при частых изменениях частоты вращения гребного вала, например, при волнении моря.
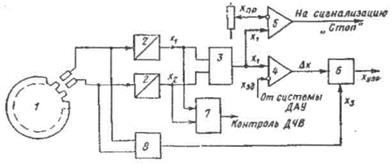
Рисунок 7.6 - Функциональная схема регулятора DEGO- II.
1 - импульсный ДЧВ; 2 — преобразователь fi v; максимальный селектор;
4 - дифференциальный усилитель (ДУ); 5— блок контроля предельной частоты вращения;
6 — микроконтроллер; 7 — блок контроля за работой ДЧВ; 8 — детектор направления вращения (ДНВ) комплексом двигатель—редуктор—винт.
В функции системы входят переключения ГД, муфт, изменения их работы и т.д.
Рассмотрим ряд устройств с использованием СВТ.
В микропроцессор поступает также информация от детектора 8 о направлении вращения гребного вала для судов с ВФШ в виде сигнала х3.
В системе предусмотрено ограничение пусковой топливоподачи. Если пусковая подача топлива приводит к слишком быстрому разгону вала ГД, то при достижении некоторой частоты вращения топливоподача уменьшается, увеличение частоты вращения становится более медленным (рисунок 7.8).
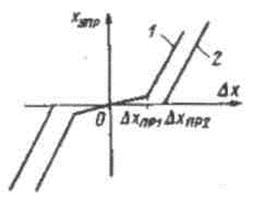
Рисунок 7.7. Зависимость хупр от 
1 — при  ; 2 —при
; 2 —при 
Управляя через микроконтроллер, также можно предотвращать перегрузку дизеля по моменту и обеспечивать топливоподачу в зависимости от давления наддувочного воздуха, так как при низкой частоте вращения турбокомпрессора будет низкое давление воздуха, что приведет к повышенной дымности сгорания топлива. Все эти ограничения могут быть «сняты» в аварийных ситуациях. Исполнительным органом, перемещающим топливную рейку, служит электродвигатель постоянного тока с питанием через преобразователь. В системе также предусматриваются сигнализация и остановка дизеля при повышении предельной частоты вращения хпр. контролируемой блоком 5 (см. рисунок 7.6), и контроль за работой ДЧВ 7.
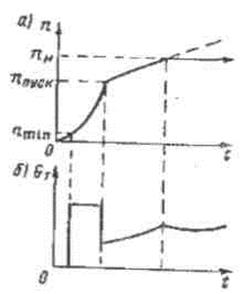
Рисунок 7.8 - Характеристика топливоподачи при быстром пуске:
а - зависимость n = f (t), б — зависимость G Т = f (t)
2. Цифровая система регулирования судовых ГД типа DGS-8880 (фирма Nor-control, Норвегия).
В настоящее время все чаще стали применять на судах 4- и 5-цилиндровые малооборотные длинноходовые дизели для привода ВФШ или ВРШ. Такие дизели обладают повышенной экономичностью, но имеют меньшую инерционность и увеличенную неравномерность хода на долевых режимах, что затрудняет их регулирование, особенно с применением валогенераторов.
Система DGS-8800 приспособлена к работе с такими дизелями и обеспечивает повышенную точность поддержания заданной частоты вращения ГД в штормовых условиях. Поэтому ГД с регуляторами DGS-8800 в меньшей степени нуждаются в применении дорогостоящих устройств, обеспечивающих режим ПЧВ для привода ВГ.
Система состоит из двух отдельных автономных подсистем,, построенных каждая на своем МКП; первая вырабатывает сигнал регулирования частоты вращения, вторая — отрабатывает этот сигнал путем воздействия на топливоподачу, используя импульсные датчики давления продувочного воздуха, которые и ограничивают топливоподачу ГД по параметрам наддува.
Как видно из примеров, СВТ успешно применяют в САУ и САР разнообразными объектами на судах, в частности, для автоматического управления ЭЭС, систем централизованного охлаждения СЭУ, которые поддерживают оптимальную температуру в замкнутом контуре охлаждающей пресной воды путем регулирования ее расхода через центральный охладитель и изменения числа работающих циркуляционных насосов забортной воды (CAP ENGARD шведской фирмы «Альфа-Лаваль» и др.
Судовые системы централизованного контроля также переводятся на СВТ. Появление МКП привело к дальнейшему развитию судовых средств оперативного контроля энергетических и экономических показателей работы СЭУ, а также наблюдения за состоянием ТС. Используются автономные устройства, предназначенные для измерения и вычисления в ходе эксплуатации судна текущих и осредненных значений общего и удельного расходов топлива СЭУ и ГД судна, расхода топлива на милю пройденного пути, мощности и крутящего момента на валу, а также ряда вспомогательных величин, например, общего количества израсходованного и остающегося в цистернах топлива, его плотности и температуры и т. п. Примером устройств такого класса может служить прибор «SAL-FE» (фирма «Юнгнер марин», Швеция).
Более сложные программы позволяют получать на экране информацию и в графической форме. Прибор FMS-4 (фирма «Пэндел инструментс», США) представляет оператору кривую фактической на данный момент зависимости расхода топлива от частоты вращения гребного винта. Как показывает практика, выбирая на основании этой кривой наиболее экономичный режим работы ГД, можно достичь экономии топлива свыше 7%. В некоторых приборах подобного назначения фактические значения технико-экономических показателей сравниваются с записанными для определенных условий плавания в блоке памяти прибора с их эталонными значениями. Так, в устройстве «ELNA-2050» предусмотрена индикация отклонений (в процентах) фактических значений скорости и расхода топлива (в литрах на час или в литрах на милю) от значений зависимости этого расхода от скорости судна с учетом различных условий загрузки судна; кривые строятся заранее на основе данных фактических испытаний судна, проводимых периодически в ходе эксплуатации. Экономия топлива с помощью этого прибора составляет до 10 %.
Устройство подобного назначения работает на основе данных измерителей расхода топлива, датчиков частоты вращения крутящего момента на валу, измерителя мощности.
Устройство «Чифтейн 100» (рисунок 7.9), разработанное международным концерном «Шелл интернэйшнел мэрин» рассчитывает текущие значения расстояния, проходимого судном, при расходовании единицы массы топлива (в милях на тонну), удельный расход топлива на СЭУ (в тоннах на киловатт-час) и расстояние, проходимое при затрате единицы энергии (в милях на киловатт-час). Кроме этих величин, обновляемых через каждые 5 с, на экран индикатора можно вызвать значения скорости судна, плотности и температуры топлива, частоты вращения, крутящего момента и мощности на гребном валу и часового общего расхода топлива (кг/ч).
При создании устройства особое внимание было уделено повышению его чувствительности; в результате он почти сразу количественно оценивает влияние изменений скорости, осадки и дифферента судна на его экономические показатели. В целях выявления тенденций изменения технико-экономических данных, кроме режима обычной индикации параметров, предусмотрены режимы представления их в табличной форме с интервалом от 1 мин до 9 ч и в виде графиков от 30 мин до 9 ч. Применение прибора приводит к экономии топлива до 5 т/сут.
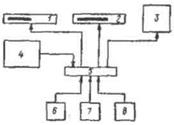
Рисунок 7.9 - Схема устройства «Чифтейн 100» оперативного контроля технико-экономических характеристик судна в ходе его эксплуатации
1 — индикатор в МО; 2 — индикатор в рулевой рубке; 3— прибор регистрации тенденций изменения параметров: 4 — мнкроЭВМ; 5— блок вычисления технико-экономических характеристик; 6 — лаг; 7 — топливный расходомер; 8 — измеритель мощности на гребном валу
Создаются системы автоматического регулирования технико-экономических показателей СЭУ (рисунок 7.10).
Центральный блок системы 4 обеспечивает индикацию параметров и управление частотой вращения ГД и шагом ВРШ. Таким образом, система может автоматически поддерживать, например, оптимальное соотношение между частотой вращения и шагом винта для различных условий эксплуатации, или заданный расход топлива на милю пройденного пути (или следить за тем, чтобы она не превышала определенный предел), независимо от погодных условий, глубин моря, направления течения и т. д.
Такие системы позволяют экономить свыше 5 % топлива.
Как отмечалось выше, все большее значение приобретают СВТ дли развития средств контроля технического состояния энергетического оборудования. Такие приборы выдают данные, необходимые как для обоснованного планирования технического обслуживания энергетического оборудования, так и для диагностирования причин неисправностей и аварий. К их числу относятся приборы контроля параметров рабочего процесса в цилиндрах дизеля, например прибор DECAMS (фирма «Три кэйз мэрии», Англия), с микроЭВМ общего назначения типа PC фирмы IBM или система NK-5 фирмы «Аутроника мэрии» (Норвегия).
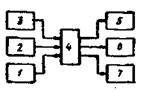
Рисунок 7.10 - Система «Эта-Пайлот» автоматического регулирования технико-экономических показателей работы СЭУ [Швеция]
1 — ДЧВ гребного вала; 2 — топливный расходомер; 3 — лаг: 4 — центральный блок системы с МКП: 5 — печатающее устройство; 6 — устройство изменения частоты вращения гребного вала; 7 — устройство изменения шага гребного винта
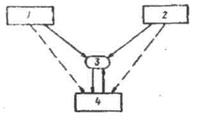
Рисунок 7.11 - Схема связей судового диагностического комплекса
с использованием элементов искусственного интеллекта
1 — система хранения и обработки технико-эксплутационной информации по судовому ГД «Мэн-Ма»; 2 — система температурного контроля ГД ENCOM: 3 — пользователь; 4 — экспертная система по судовым дизелям FIKS
Финская фирма «Вяртсиля» разработала систему ENCOM для технической диагностики судовых дизелей и контроля температуры основных деталей двигателя: подшипников коленчатого вала, поршней и цилиндровых втулок, а также выпускных газов каждого цилиндра и самих выпускных клапанов. Данные обрабатываются МКП и представляются на экране видеоиндикатора в виде кривых и графиков.
Ведутся работы по созданию комплекса, использующего средства искусственного интеллекта (рисунок 7.11). В него вошла система ENCOM и специально разработанная для судовых дизелей «интеллектуальная» часть — экспертная система FJKS, реализуемая на персональной ЭВМ серии PC фирмы IBM. В комплекс также входит система «Мэй-Ma», построенная на использовании микроЭВМ и служащая для хранения, обработки и выдачи технико-эксплуатационной информации об обслуживаемом оборудовании, номенклатура и количество имеющихся в наличии запасных частей (ЗИП), трудоемкость различных операций ремонта и обслуживания, количество отработанных механизмами часов, сроки технического обслуживания и т. п. По данным, вводимым в систему F1K.S от систем ENCOM и «Мэй-Ma» вручную или автоматически, экспертная система определяет наиболее вероятную причину возникших отклонений от нормального режима и выдает результат в текстовой форме на экран. По запросу пользователя могут быть также выданы рекомендации по устранению неисправностей.
СВТ применяются также в различных автономных регуляторах, устройствах контроля, регистрации, сигнализации и тому подобное с использованием встроенных микроконтроллеров и микроЭВМ. Это — электронные терморегуляторы для использования в системах охлаждения воды, масла и воздуха судовых дизелей, индикаторы концентрации масляного тумана в картере дизеля, системы кнопочного машинного телеграфа, аппаратура автоматики устройств топливоподготовки, контроля качества хранящегося в цистернах или принимаемого на борт топлива и масла (с непрерывным контролем плотности, вязкости и температуры, содержанием воды в процентах и различных примесей), приборы контроля содержания нефти в воде после сепарации трюмных вод и т. д.
Вопросы для самопроверки:
1. Что такое ДАУ ГД и их назначение?
2. Что позволяет применение вычислительной техники?
3. Объясните назначение регулятора DEGO?
4. Объясните назначение цифровой системы регулирования DGS-8880.
Примеры построения современных и перспективных КСУ
Широкую известность получили КСУ с распределенной структурой, применяемые в промышленных АСУ технологическими процессами. Для такой системы характерно рассредоточение основной части СВТ (микроЭВМ, микроконтроллера и т. п.), из которых построена система, по всему управляемому объекту (УО). Эти средства конструктивно оформляются в виде автономно работающих локальных подсистем, которые выполняют все функции управления и контроля отдельными агрегатами и устройствами. При этом каждая локальная станция обслуживает оборудование, вблизи которого она расположена. За центральной ЭВМ остаются функции связи системы с человеком-оператором (выдача всей необходимой информации и получения команд), накопление данных и координация работы системы в целом.
Современные судовые распределительные системы централизованного управления и контроля с точки зрения аппаратно-программной базы можно рассматривать как локальные вычислительные сети особого класса. От обычных систем автоматизации с центральной ЭВМ, осуществляющих псе функции управления и контроля объекта, распределенные системы отличаются повышенной надежностью. Благодаря высокой автономности локальные СУ продолжают осуществлять нормальное управление объектом даже при каких-либо неисправностях центрального узла системы. Надежность самих локальных СУ обеспечивается, благодаря резервированию микросхем, возможностями самоконтроля и самодиагностирования и т. д. Другое преимущество КСУ с распределенной структурой — сравнительная простота их организации, облегчающая монтаж и освоение эксплуатации, а также позволяющая увеличивать объем функций системы путем простого увеличения количества аппаратуры и программ.
Передача данных от КСУ с распределенной структурой может быть:
магистральной, когда все устройства КСУ независимо от уровня соединены одной непрерывной линией передачи данных, последовательно обходящей все эти устройства. В целях повышения надежности линию иногда замыкают в кольцо;
радиальной («звезда»), когда от центрального узла КСУ к каждому периферийному узлу идет отдельная линия.
Внастоящее время в практике судостроения применяют КСУ техническими средствами, состоящими из комплекта унифицированных блоков, с помощью которых возможна автоматизация судов до любой степени.
Фирмой «NORKONTROL» разработан комплект универсальных унифицированных МКП блоков типа «Мэритайм микроз». Комплект состоит из следующих блоков:
блок SAU 8800 — выполняет роль универсальной локальной системы контроля и сигнализации. Состоит из МКП, энергонезависимого ЗУ и 32 каналов для подключения датчиков, сигнализаторов и счетчиков аналогового или двоичного сигналов. При потере управления со стороны центральной ЭВМ специальный таймер переключает блок в резервный режим, в котором он функционирует как полностью автономное устройство. При отказе блока на всех его выходах устанавливается заранее заданное безопасное значение сигнала, а в общую систему поступает импульс для принятия необходимых мер. Любой канал может быть использован как входной или выходной;
блок SPU 8600—центральный узел КСУ. Состоит из микро-ЭВМ (до 8 штук) марки 8086 фирмы INTEL (США). Рассчитан преимущественно для использования в системах управления и контроля СЭУ, грузовых и общесудовых систем, а модификация блока пригодна для решения задач автоматизации судовождения. Блок может обрабатывать сигналы от 2560 датчиков, централизованно программировать работу МКП других блоков комплекта «Мэритайм микроз» и т. д. Информация любого вида и сложности выводится на четыре цветных видеотерминала в виде перечней поступивших аварийных сигналов, кривых, графиков, схем установок и т. д.;
блок PCU 8800 — программируемый микроконтроллер. Рассчитан на последовательное автоматическое управление механизмами, клапанами трубопроводов, регулирование температур, давлении и т. д. в зависимости от заданной программы. Имеет 32 выходных канала. Программа работы вводится в ЗУ блока с переносного операторского терминала. Число каналов может быть увеличено до 288;
блок ОСР 8800 — терминал оператора. Обеспечивает связь КСУ с оператором. Устанавливая с помощью шаровой координатной рукоятки управления крестообразный маркер на обозначение механизмов или клапанов на мнемосхеме СЭУ на экране видеотерминала, можно нажатием одних и тех же клавиш воздействовать на разное оборудование. Таким способом устраняется необходимость иметь на каждый механизм или клапан отдельные кнопки управления;
блоки DGS 8800 — цифровое регулирование ГД, GCU 8800 — управление электрогенераторами; LGU 800 — измерение уровней жидкости.
По такому принципу работает система автоматизации грузовых операций «Дэйта мастер 7», построенная из блоков LGU, PCU, SPU и ОСР и установленная на танкере «Ярена» грузоподъемностью 129 000 т. Система управляет 6 насосами, обслуживающими 14 танков, а также обеспечивает дистанционное управление клапанами балластной системы.
Модифицированная система централизованного контроля «Дэйта чив 7 миди» для СЭУ (рис. 7.14) построена из блоков SAU и имеет терминал оператора ОСР в качестве центральной станции.
Предполагается, что в перспективе все используемые сейчас на судах средства автоматики разнообразных марок и фирм, поставляемые вместе с оборудованием, которое они обслуживают, должны быть заменены на описанные комплекты блоков. В этом случае не только сложные системы, но и индивидуальные устройства автоматики любого назначения окажутся унифицированными, что значительно облегчит эксплуатацию судов и ремонт.
Рассмотрим ряд КСУ, применяемых на судах мирового флота.
1. КСУ ТС фирмы «Сименс» (Германия). Системы с распределенной магистральной структурой передачи данных (рисунок 7.13) состоят из подсистем:
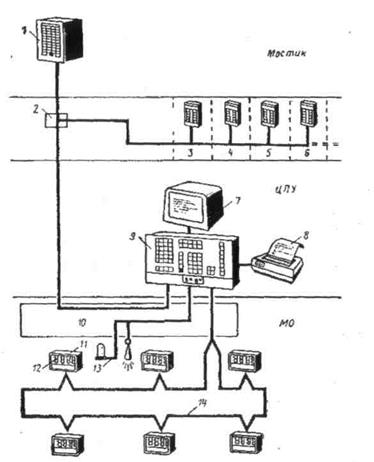
Рисунок 7.12 - Распределенная система централизованного контроля «Дэйта ив 7 миди»
фирмы «Норконтрол отомэйшен» [Норвегия]
1 — панель сигнализации и вызова вахтенных: 2 — соединительная коробка; 3 — столовая экипажа; 4 — комната отдыха; 5. 6 — каюты; 7 — видеоиндикатор; 8 — печатающее устройство; 9 — унифицированный терминал оператора ОСР-8800; 10 — выходное устройство; 11 — унифицированный блок измерения и сигнализации SAU-8800; 12 — датчики; 13 — аварийно-предупредительная сигнализация; 14 — магистраль передачи данных
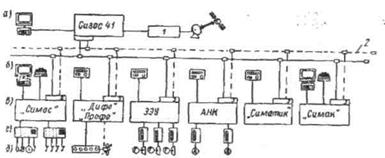
Рисунок 7.13 - Распределенная КСУ ТС с магистральной структурой сети передачи данных фирмы «Сименс» (Германия):
а — средства централизованного контроля и ввода задания в целом; б — средства ввода задания и регистрации данных по подсистемам; в — средства управления и контроля и подсистемах; г — локальные системы автоматического контроля, управления и регулирования; д — технические средства судна
1 — выход на линию связи через ИСЗ с берегом; 2 — резервная линия передачи данных; 3 — средство сопряжения с сетью передачи данных
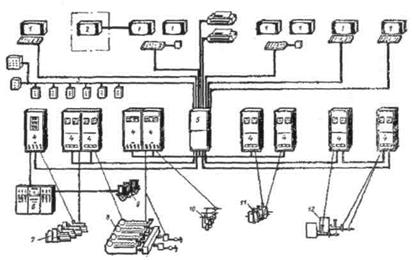
Рисунок 7.14 - КСУ ТС «Сэлма марин» с радиальной структурой сети передачи данных фирмы ABB
1 — видеотерминалы в ЦПУ МО, на мостике и в служебных помещениях; 2 — видеоиндикатор в посту бункеровки; 3 — групповая сигнализация в помещениях членов экипажа; 4 —автономные локальные станции управления и контроля с микроЭВМ; 5 — центральный узел с двумя микроЭВМ; 6 — ГРЩ; 7 — ДГ; 8 — ГД; 9— подруливающие устройства; 10 — регуляторы температуры; 11 — резервные насосы; 12 — цистерны и трубопроводы
«Симос» — автоматического контроля работы СЭУ с вызовом параметров на дисплеи и печатающее устройство;
«Дифо» — ДАУ ГД для судов с ВФШ;
«Профо»— управления движением судов с ВРШ;
ЭЭЛ—автоматического управления судовой ЭЭС;
ЛНК—автоматического управления насосов и компрессоров;
«Симатик» — программного управления;
«Симак» — микроЭВМ общего назначения (грузовые расчеты, административно-хозяйственные функции и т.д.);
— «Сигос 41» — выдачи информации, общего контроля и управления.
2. КСУ ТС «Селма марин» концерна ABB * (фирма «Стромберг», Финляндия). Система с распределенной радиальной структурой сети передачи данных (рисунок 7.14) впервые была применена на шведском автомобильном пароме «Свеа». Модифицированная КСУ «Селма-2» установлена на ряде судов России, таких как атомные ледоколы «Таймыр» и «Вайгач», на судах типа «Академик Федоров», «Механик Ярцев» и др.
КСУ «Селма-2» выполнена на 16 - разрядной микроЭВМ марки 8086 с арифметическим процессором 8087 фирмы INTEL и выполняет все необходимые на судне операции контроля, управления и регулирования. Основными функциями являются:
— аварийно-предупредительная сигнализация (АПС) и измерение параметров энергетической установки и систем; блоки АПС установлены в каютах механиков, электромеханика и в кают-компании;
— управление и защита главного двигателя; защита обеспечивается остановкой или снижением нагрузки за счет уменьшения шага гребного винта или частоты вращения ГД;
— управление ВРШ с ходового мостика, из ЦПУ и непосредственно в МО;
— для судов с электродвижением управление всей гребной установкой, включая главные генераторы и гребные электродвигатели;
— управление электроэнергетической установкой, включая ДГ, ВГ и электростанцию;
— управление вспомогательными механизмами, включая насосы охлаждения забортной водой, масляные, циркуляционные, топливные, гидравлические и другие насосы СЭУ;
— автоматизация котельной установки;
— управление осушительной системой в МО;
— регулирование температур и вязкости топлива;
— измерение уровней топлива жидкости в цистернах;
— регистрация маневров и АПС;
— самодиагностика в случае отказа одной из электронных карт, в микроЭВМ подается сигнал на вышедшую из строя карту.
Принцип программирования, использованный в КСУ «Селма-2» отличается от традиционного и состоит в так называемом блочном программировании операций с помощью функциональных блоков.
Такой подход исключает использование языков программирования высокого уровня таких, например, как АССЕМБЛЕР, ПЛ/М, ПАСКАЛЬ и др., которые затрудняют внесение в программу изменений во время пусконаладочных работ, в ходе оптимизации процессов в зависимости от условий эксплуатации, при дальнейшей модернизации СЭУ. КСУ выводит необходимые схемы в цветном изображении на дисплее. Основными техническими средствами диспетчерской системы «Селма-2» являются цветной дисплей и клавиатура. С помощью специальных полей вывода, находящихся на кадрах изображений цветного дисплея, выводятся необходимые данные о ходе процесса в цифровой и графической формах. С помощью клавиатуры оператор со специальных полей управления подает на кадры изображения управляющие воздействия.
Система «Селма-2» комплектуется из узлов двух типов:
— управляющие вычислительные машины, автономные или универсальные, имеющие последовательные каналы связи, которые осуществляют сбор информации для выполнения логических функций, регулировок и управления процессом. Используются цифровые и аналоговые входные и выходные сигналы;
— диспетчерские блоки, выполняющие операции взаимодействия «человек—машина».
Все связи между диспетчерским блоком и процессом проходят через УВМ, причем к одной УВМ можно подключить несколько диспетчерских блоков.
3. КСУ ТС «Стэлла UMS -900» (фирма STL, Дания). Система с распределенной магистральной структурой сети передачи данных обеспечивает централизованное управление и контроль ТС (рисунок 7.15). Основными элементами КСУ являются модули «Альфа» обеспечивающие связь системы с контролируемыми процессами (с локальными станциями в МО), и блок «Бета» (ЭВМ в ЦПУ), управляющий средствами связи системы с оператором.
Модуль «Альфа» представляет собой автономную микроЭВМ, построенную на базе МКП iAPX 186 фирмы INTEL. Изменяя программы, хранящиеся в памяти, модуль «Альфа» можно превратить из устройства контроля в устройство последовательного управления или в цифровой регулятор.
Блок «Бета» осуществляет функции центральной ЭВМ. Передача данных по магистрали (двойному коаксиальному кабелю) происходит со скоростью 125 кбайт/с. Настройка системы на объекте (модулей «Альфа») выполняется лишь с помощью клавиатуры.
Данные по каждому модулю «Альфа» записываются в памяти блока «Бета», их можно воспроизвести даже в случае замены блоков «Альфа» новыми.
К достоинствам КСУ «Стелла» относят прежде всего ее высокую надежность. В случае выхода из строя любого из модулей «Альфа» лишь очень ограниченная часть общего объема функций системы (не более 30—32 ее входных или выходных каналов) будет затронута. Кроме того, возможно резервирование модулей «Альфа», обслуживающих наиболее важные функции. Если выйдет из строя блок «Бета», модули «Альфа» будут продолжать функционировать иобмениваться между собой данными.
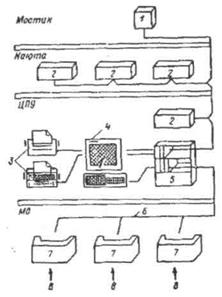
Рисунок 7.15 - КСУ ТС «Стэлла UMS-900» с магистральной структурой сети передачи данных фирмы STL (Дания)
1 — групповая сигнализация; 2 - обобщенный контроль групповая сигнализация:
3 — печатающие устройства; 4 — видеомонитор с клавиатурой; 5 — центральная ЭВМ («Бета»); 6—магистраль последовательной передачи данных; 7 —локальная станция модулей «Альфа» связи системы с контролируемыми процессами; 8 — выходные сигналы датчиков и сигнализаторов.
4. КСУ ТС «Дэйматик марин» (фирма «Валтен отомэйшен», Норвегия). Эта крупномасштабная КСУ охватывает все ТС судна. Они представляют собой информационно-управляющий комплекс, созданный специально для трех норвежских универсальных судов «ПРОБО Биах», «ПРОБО Брали», «ПРОБО Бритт» дедвейтом по 49 070 т каждое, построенных на южнокорейской верфи.
КСУ с распределенной двухуровневой структурой (рисунок 7.16), имеющей магистральную сеть передачи данных на уровне локальных сетей и радиальную («звезду») — на уровне обшей сети. Роль локальных сетей выполняют два комплекта системы «Дэйматик марин», из которых один обслуживает энергетическую установку, а второй — грузовую и ряд общесудовых систем, а также навигационко-вычислительный комплекс NACOS-20.
Сводит все данные в единый комплекс — система сбора, обработки и представления информации ISMIS (фирма Дэйта Шип», Норвегия).
КСУ обеспечивает:
— управление главным дизелем;
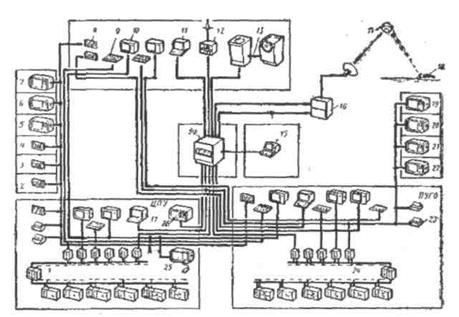
Рисунок 7.16 - КСУ «Дэйматик марин» с радиально-магистрзльной структурой передачи данных фирмы «Валмет отомэйшен» (Норвегия)
1 — система «Дэйматик марин» для управления и контроля СЭУ; 2 — гимнастическая каюта; 3 — столовая; 4 —каюта отдыха: 5—каюта электромеханика; 6 — каюта второго механика; 7— каюта старшего м






