Область эксплуатационных режимов дизеля, работающего на ВРШ, значительно расширяется за счет дополнительного изменения его нагрузки путем воздействия на шаг винта. При этом улучшается использование мощности и маневренные качества судна, компенсируются влияния внешних факторов на характеристику винта, исключаются режимы работы в области «тяжелого» винт. Однако при работе на ВРШ возможность перегрузки дизеля становится более вероятной, чем при работе на ВФШ, что выдвигает определенные требования к системам управления, защиты и к выбору режимов.
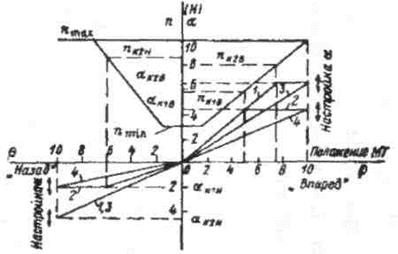
Рисунок 5.1 - Программа управления системой ДАУ движение судов с ВРШ. Здесь  — максимальные постоянные углы разворота лопастей винта всоответствующем режиме;
— максимальные постоянные углы разворота лопастей винта всоответствующем режиме;  — частота вращения вала ГД, при которых шаг винта становится неизменным:
— частота вращения вала ГД, при которых шаг винта становится неизменным:
1 - комбинаторный режим при двух ГД; 2 - комбинаторный режим при одном ГД;
3 - режим ПЧВ при двух ГД; 4 - режим ПЧВ при одном ГД
Дизель, работающий на ВРШ, следует должным образом подготовить к действию. Пуск и прогревание ГД производятся только из ЦПУ или с местного поста в режиме холостого хода при нулевом упоре винта, и после прогревания управление передается на мостик. При использовании МОД с ВРШ предусматриваются три временные программы нагрузки (см. рисунок 4.2). В дальнейшем управление движением судна осуществляется перемещением рукоятки машинного телеграфа (МТ) на мостике.
Возможны несколько режимов управления с мостика, в том числе комбинаторный и при постоянной частоте вращения вала ГД (режим ПЧВ). Программы представляют собой зависимости частоты вращения валаи угла поворота лопастей α (или шага винта Н)от положения рукоятки МТ b и составляются заводом-строителем на основании гидродинамических характеристик винта и значений предельной нагрузки дизеля (рисунок 5.1).
В комбинаторном режиме используется программа совместного изменения частоты вращения ГДза счет топливоподачи и шага винта таким образом, чтобы обеспечивалась работа дизеля при допустимой нагрузке, рекомендованной фирмой-изготовителем ГД для каждого скоростного режима судна. Каждому положению рукоятки МТ на мостике соответствует определенное сочетание частоты вращения ГД и шага винта. Комбинаторный режим управления используется при маневренных режимах судна до значений частоты вращения вала ГД  (при функционировании двух ГД) и
(при функционировании двух ГД) и  (при одном ГД). При дальнейшем увеличении нагрузки воздействие на шаг винта прекращается, и на режимах полного хода ГД работает при постоянном значении (H / D)mаx = const, т. е. при
(при одном ГД). При дальнейшем увеличении нагрузки воздействие на шаг винта прекращается, и на режимах полного хода ГД работает при постоянном значении (H / D)mаx = const, т. е. при  и
и  .
.
Режим ПЧВ вала дизеля (обычно максимальной частоты вращения) используется при управлении судном в море, при этом возможно подключение валогенератора.
Значение максимального шага можно регулировать соответствующими потенциометрами при данной частоте вращения, т.е. при одном и том же положении рукоятки МТ может быть различная нагрузка ГД (угол наклона кривых 1 - 4 на рисунке 5.1 меняется).
Системы ДАУ судов с ВРШ содержат регулятор нагрузки дизеля. Нагрузка ГД контролируется при работе судна в особо тяжелых условиях (резкая остановка, быстрый набор скорости, штормовая погода, сложная ледовая обстановка и т.д.) и поддерживается в заданных пределах изменением шага винта. На рисунке 5.2 приведены рассчитанные и запрограммированные в регуляторе нагрузки оптимальные программы h т= f (n), хорошо согласованные с ограничительными характеристиками дизеля при различных условиях работы судна.
Выбор программы осуществляется вручную потенциометром на посту управления в ЦПУ. При обеспечении, например, постоянной частоты вращения (режим ПЧВ с валогенератором) в зависимости от условий плавания нагрузка (подача топлива hT) может устанавливаться в пределах от (0,6—0,7) hT .П. до hT .Н — номинальной.
Регулятор поддерживает нагрузку ГД как на маневренных режимах при работе по комбинаторной программе, так и на режиме ПЧВ с валогенератором. При необходимости резкой остановки судна рукоятку МТ на мостике передвигают полностью назад, не опасаясь перегрузки дизеля. Это достигается за счет сохранения высокой частоты вращения коленчатого вала дизеля при уменьшении шага винта до нуля, а затем при уменьшении частоты вращения в комбинаторном режиме. В различных условиях плавания судна программа контроля шага позволяет оптимально использовать мощность ГД (см. рисунок 5.2).
Временная программа в процессе увеличения нагрузки и остановки ГД позволяет поддерживать параметры тепловых и механических напряжений дизеля is допустимых пределах за счет уменьшения шага винта. Система безопасности включает механизмы остановки дизеля в случае его разноса, мгновенной остановки судна или поломки лопастей. При наличии двух и более ГД, параллельно работающих па один гребной вал, необходим контроль за нагрузкой каждого ГД и, кроме того, должна быть предусмотрена возможность распределения нагрузки между ГД путем их выравнивания.
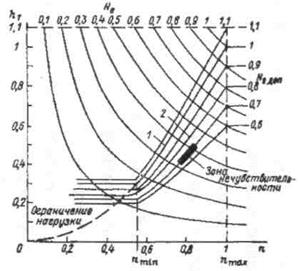
Рисунок 5.2 - Кривые нагрузки системы ДАУ судов с ВРШ:
1, 2 - зависимости hT = f(n) для 100 %-й и 80%-й нагрузки соответственно
Система распределения нагрузки обеспечивает одинаковую подачу топлива в дизели в соответствии с предварительно заданной программой во всем диапазоне частоты вращения (см. п. 2.5 и рис. 2.4 и 2.5). Сигналы датчиков положения рейки ТНВД, характеризующие нагрузки ГД, сравниваются в схеме, и в случае разбаланса сигнал приводит в действие СД ВРЧВ с целью компенсации различий в нагрузках.
На ходовой мостик и в ЦПУ поступает непрерывная информация о величине шага гребного винта по отдельной измерительной системе. С ее помощью можно также выполнять аварийное управление шагом винта при неисправностях в главной системе управления. В этом случае шагом винта управляют с мостика вручную при помощи кнопок, воздействующих на регулирующие клапаны маслораспределительной коробки МИШ винта.
Таким образом, главными элементами системы ДАУ движении судна с ВРШ являются: комбинаторная часть, канал по регулированию шага и блок регулятора нагрузки, который контролирует правильность соотношений между частотой вращения гребного нала и положением рейки ТНВД. Например, в процессе маневрирования из-за инерции судна, а на установившихся режимах под влиянием внешних факторов на сопротивление движению судна возможны перегрузки дизелей. Благодаря регулятору нагрузки такое состояние автоматически устраняется корректированием шага винта.
Входными сигналами для регулятора нагрузки являются положение рейки ТНВД — топливоподача hт и частота вращения вала дизеля п. Действуя совместно с ВРЧВ, обеспечивающим заданную частоту вращения, регулятор нагрузки при рассогласовании действительных и программных значений hт вырабатывает сигнал на разворачивание лопастей винта так, чтобы сохранить значение hЗД, соответствующее положению органа управления топливоподачей. При всех внешних возмущениях путем изменения шага винта стабилизируются момент и мощность дизеля. Как следует из рисунка 5.2, программы значений hт рассчитаны на большую область нагрузок и частот вращения. Очевидно, что при требуемой мощности дизеля Ne не должно быть перегрузки, т.е. работы за пределами ограничительной характеристики дизеля по Ne ДОП или hтДОП.
Выбор оптимальных программ особенно важен для судов с постоянно меняющимся моментом Ме на гребном валу, т.е. для траулеров, буксиров, судов ледового плавания и других подобных судов, так как регулятор нагрузки позволяет существенно улучшить тяговые свойства судна и без перегрузки дизеля достичь необходимой скорости при движении во льдах, с тралом или буксиром. Используя регулятор нагрузки, можно решить и другие важные задачи по оптимизации управления дизелями, а именно:
- оптимизировать подачу топлива во всем диапазоне скоростных режимов независимо от наличия глубины под килем, обрастания, мертвой зыби, встречного ветра;
- улучшить маневренные качества суда и сократить тормозной путь при экстренной остановке, благодаря изменению подачи по оптимальной зависимости hтОПТ (п);
- автоматически защитить дизель от перегрузки при выходе из строя ТНВД, форсунок отдельных цилиндров (при внезапном разобщении муфт или остановке дизелей в многомашинных установках, режим работы остальных дизелей определяются той же программой hтОПТ (п);
- полнее использовать ресурс дизелей путем переключения программ и приведения их в соответствии с состоянием дизеля, сортом применяемого топлива и т.п.;
- стабилизировать частоту вращения на режимах работы с ВГ, а при колебании нагрузки ВГ поддерживать полную загрузку ГД;
- предохранить дизель от случайных перемещений рукояток управления на мостике и в ЦПУ.
Динамические характеристики регулятора нагрузки должны удовлетворять требованиям переходных режимов, в том числе в таких тяжелых условиях, как быстрое изменение шага винта с полного хода «Вперед» на полный ход «Назад».
Во избежание частых перекладок лопастей винта регулятор настраивают на воздействие сравнительно плавных внешних возмущений, длительность которых свыше 5 с. Зона нечувствительности («мертвая зона», «фильтр волнения») находится в пределах (1,0-7,0)% установленной мощности Ne (см. рисунок 5.2) и регулируется потенциометром из ЦПУ.
Вопросы для самопроверки:
1. Назовите режимы управления ГД с ВРШ с мостика
2. Для чего в системе ДАУ с ВРШ необходим регулятор нагрузки?
3. Какая программа используется в регуляторе нагрузки?
4. Назовите входные сигналы для регулятора нагрузки






