Среди поисковых СНС с оптимизацией некоторого показателя функционирования реального объекта или показателя качества управления широко распространены экстремальные СНС. Их отличительным признаком является наличие у ОУ статической характеристики с явно выраженным экстремумом (рисунок 8.7), достигаемым при определенных значениях входных переменных. В таких системах экстремальность обеспечивается не за счет изменения параметров СУ, а за счет изменения сигналов управления, и сам критерий оптимальности определяется естественными свойствами ОУ, я не является искусственно вводимой мерой отклонения свойств реальной системы от се математической модели. Экстремальные СНС обеспечивают оптимальный режим работы ОУ. В качестве критерия оптимальности принимается значение максимума или минимума функции качества работы объекта, когда не известны ни число экстремумов, ни их положение.
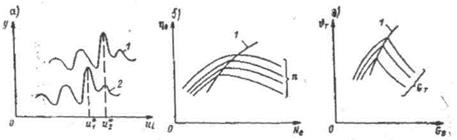
Рисунок 8.7 - Статические характеристики экстремальных систем:
а — слежение за глобальным экстремумом; б — зависимость  при ni = const;
при ni = const;
в — зависимость  при GTi = const.;
при GTi = const.;  — температура в топке котла; GB — расход воздуха; GT— расход топлива
— температура в топке котла; GB — расход воздуха; GT— расход топлива
Экстремальные СНС управления должны вывести рабочую точку (режим работы ОУ) на глобальный экстремум и удерживать ее в этом положении. От действия возмущений или других сигналов управления все экстремумы характеристики ОУ могут смещаться как по горизонтали, так и по вертикали (рисунок 8.7, а, кривые 1 и 2). Экстремальная СНС должна организовывать движение переменных при любых возмущениях таким образом, чтобы СУ, несмотря на перемещение глобального экстремума, удерживала рабочую точку в экстремальном значении и1 * или и2 *.
Экстремальные характеристики присущи многим ОУ, в том числе и судовым, у которых, как правило, эти характеристики выпуклые или вогнутые, а следовательно, имеют один глобальный экстремум.
На рисунке 8.7, б приведена характеристика изменения эффективного КПД в зависимости от нагрузки дизеля при n = const, а на рисунке 8.7, в — температуры в топке котла от количества расхода воздуха GВ, при постоянных значениях расхода топлива GT.
Как следует из рисунка 8.7, б и в, происходит смещение экстремумов. Линия 1 определяет наиболее экономичные соотношения величин  и n впервом случае и
и n впервом случае и  — во втором.
— во втором.
Примерами судовых СУ с экстремальными характеристиками являются СУ успокоителями качки; движением судна по курсу; радиолокационными установками; размагничиванием судов; винтом регулируемого шага (ВРШ); энергетической установкой (ЭУ). На рисунке 8.8 показана зависимость удельного расхода топлива gT дизеля в зависимости от скорости судна vc при постоянной частоте вращения вала дизеля ni для судов с ВРШ.
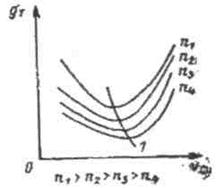
Рис. 8.8. Статическая экстремальная характеристика  при ni = const
при ni = const
Изменение скорости судна vc происходит за счет изменения шага винта H и выражается зависимостью vc = f(H). Как следует из рисунка 8.8. минимальный удельный расход топлива gT при разных значениях пi = const будет при различной скорости судна. Кроме того, смещение точки минимума при данном значении пi = const возможно при изменении нагрузки, качества топлива, давления, температуры и др. Можно полагать, что на вход системы подается вектор управления и (многомерное управление), авыходная экстремальная координата и скалярная функция:  , экстремум которой достигается при некотором значении u *, при этом
, экстремум которой достигается при некотором значении u *, при этом

Зависимости, подобные показанным на рисунке 8.8, позволяют определить, например, наиболее экономичный режим работы рыбопромысловых судов с тралом и выработать требования к системе регулирования напряжения и частоты вращения валогенератора при значительном снижении частоты вращения ГД. Кривая 1 позволяет определить программу оптимального управления  при gTmin.
при gTmin.
В экстремальных СНС должна быть предусмотрена возможность непосредственного измерения экстремальной выходной координаты у или вычисление ее на основе измерения некоторой совокупности величин, характеризующих состояние ОУ.
Как следует из рисунков 8.7 и 8.8, характеристики ОУ с определенной степенью точности можно представить в виде квадратичной формы, а в частном случае, при постоянных коэффициентах — в виде параболы
 или
или  .
.
Существуют разные способы поиска экстремумов: с запоминанием экстремума; вычисление градиента; шаговый (импульсного типа) и др. Рассмотрим некоторые алгоритмы поиска экстремума на конкретных примерах.
| 
|
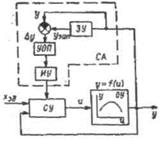
| Рисунок 8.9 - Одномерная экстремальная САУ с запоминанием. Здесь ЗУ — запоминающее устройство; УОП—устройство организации поиска; СА – система адаптации
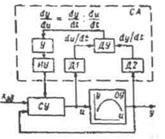
| Рисунок 8.10 - Одномерная экстремальная САУ с измерением по градиенту. Здесь Д1, Д2 — дифференциаторы; ДУ — делительное устройство; У — усилитель
|
Система поиска экстремума с его запоминанием (рисунок 8.9) оценивает разность между текущим значением выходного сигнала у объекта и его значением в предыдущий момент времени. Алгоритм работы системы следующий. Выходная величина у ОУ со статической характеристикой у=f(u) подается на запоминающее устройство ЗУ. Если у имеет максимум, ЗУ фиксирует только его увеличение, т. е. запоминание происходит только при увеличении у. На уменьшение у ЗУ не реагирует. Сигнал с ЗУ постоянно подается на элемент сравнения, где сравнивается с текущим значением сигнала. Сигнал разности  с элемента сравнения поступает в устройство организации поиска (УОП), имеющего релейную характеристику с зоной нечувствительности
с элемента сравнения поступает в устройство организации поиска (УОП), имеющего релейную характеристику с зоной нечувствительности  . Когда разность
. Когда разность  превысит зону нечувствительности УОП , исполнительное устройство (ИУ) воздействует на входной сигнал и объекта в сторону его увеличения или уменьшения в зависимости от знака разности . После срабатывания УОП, значение Узап сбрасывается и запоминается новое, если оно будет больше предыдущего. Таким образом, схема поддерживает максимальное значение регулируемой величины.
превысит зону нечувствительности УОП , исполнительное устройство (ИУ) воздействует на входной сигнал и объекта в сторону его увеличения или уменьшения в зависимости от знака разности . После срабатывания УОП, значение Узап сбрасывается и запоминается новое, если оно будет больше предыдущего. Таким образом, схема поддерживает максимальное значение регулируемой величины.
Система поиска экстремума с измерением по градиенту (рисунок 8.10), когда производная dy/du равна нулю при значении входного сигнала и = u *. Алгоритм работы системы следующий.
Значения входного и выходного сигналов ОУ подаются на два дифференциатора Д1 и Д2 на выходе которых получаются сигналы соответственно du/dt и dy/dt. Сигналы производных поступают на делительное устройство ДУ, на выходе которого получается сигнал dy/du. Этот сигнал через усилитель воздействует на ИУ, которое меняет входной сигнал и до значения dy/du = 0. Система обладает рядом недостатком, которые делают ее практически малопригодной:
— при du/dt → 0 производная dy/dt также стремится к нулю и задача отыскания экстремума становится неопределенной;
— все реальные объекты обладают инерцией, поэтому необходимо делить друг на друга не одновременно замеренные производные dy/dt и du/dt, а сдвинутые на время задержки сигналов в объекте;
— при сколь угодно малом дрейфе статической характеристики система теряет работоспособность.
Система с измерением производной по времени (рисунок 8.11).
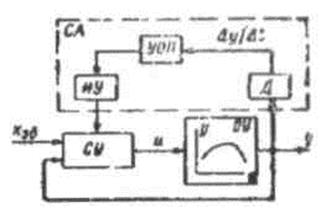
Рисунок. 8.11 - Одномерная экстремальная САУ с измерением по производной времени
В этой системе дифференцируется только выходной сигнал ОУ, который передается на УОП. Поскольку при переходе системы через экстремум знак dy/dt изменяется, то для отыскания экстремума необходимо реверсировать ИУ, когда производная dy/dt поменяет знак и превысит зону нечувствительности УОП.
Рассмотренные алгоритмы поиска экстремума хорошо реализуется с применением микропроцессорных систем.
Вопросы для самопроверки:
1. В чем суть самонастраивающихся систем?
2. Назовите примеры СУ с экстремальными характеристиками
3. Что должно быть предусмотрено в экстремальных СНС?
4. Что оценивает система поиска экстремума с его запоминанием?
Адаптивные авторулевые
С начала 70-х гг. начались интенсивные работы по созданию новых эффективных систем автоматического управления движением судна. Объясняется это резким увеличением цен на топливо для судовых энергетических установок, требованиями безопасности мореплавания в условиях увеличивающейся интенсивности судоходства, строительством крупнотоннажных и скоростных судов. Качество работы САУ движением судна и технико-экономическая эффективность ее эксплуатации зависят от выбора оптимального соотношения регулируемых параметров авторулевого. Не существует удобного для ручной настройки комплексного показателя качества. Оценить все факторы, влияющие на качество автоматического управления, и выбрать оптимальные значения параметров настройки системы в процессе ее эксплуатации невозможно.
Неоптимальное управление судном по курсу приводит к дополнительному расходу топлива. Потери полезной мощности СЭУ происходят по следующим причинам:
— «следствие удлинения пути при отклонении от заданного курса на чистоте собственных колебаний судна;
— из-за дополнительного сопротивления воды движению судна при появлении угла дрейфа;
— в результате торможения судна под влиянием угловой скорости рыскания и линейной скорости бокового смещения судна с линии курса, возникающего при одновременном дрейфе и рыскании;
— из-за дополнительного сопротивления воды движению судна за счет перекладки руля.
Все это создает дополнительное сопротивление до 2,5 % полного сопротивления для крупнотоннажных танкеров и 1,2% — для обычных транспортных судов. Потери скорости достигают 2—3 %.
Наметились два пути развития эффективных систем автоматического управления движением судном.
1. Создание автоматизированных комплексов навигации и управления на базе ЭВМ, которые решают задачи выработки оптимальных сигналов управления в различных режимах работы системы по заданным критериям качества. К таким системам относятся интегрирующие системы навигации и управления «Дейта Бридж» (Норвегия), «Аутомат» (США), «Наутомат» (Германия), «Тонак» (Япония) и др.
2. Применение автономных адаптивных авторулевых, обеспечивающих автоматическую настройку параметров системы с помощью специальной микропроцессорной системы. Такой принцип заложен в адаптивных авторулевых типа «Стирмастер-2000» (Швеция), «Rocal Decca DP-780» (Англия), «Диджи-Пайлот АП-9» (США) «Нью-Пайлот ПР-5000» (Япония) и др.
Адаптивные авторулевые выполняют оптимальную настройку параметров системы при изменении состояния ОУ и внешних условий плавания (скорости, осадки судна, состояния погоды и т,д.), т.е, обеспечивают стабилизацию судна на заданном курсе с минимальными потерями полезной мощности на управление.
Разработано несколько типов адаптивных авторулевых е. автоматической настройкой параметров:
авторулевые, осуществляющие адаптацию системы с использованием эталонной математической модели ОУ или всей системы в целом;
авторулевые, осуществляющие настройку оптимальных значений параметров системы непосредственно по заданному экономическому критерию качества;
авторулевые, осуществляющие адаптацию системы путем анализа вероятностных оценок процесса управления.
Широкое применение нашли авторулевые первого типа с эталонной математической моделью. В таких системах формирование сигналов, воздействующих на параметры управления, осуществляются на основе анализа качества удержания судна на курсе по наблюдаемым и моделируемым переменным состояния ОУ. Процесс адаптации протекает следующим образом. На вход эталонной модели (рисунок 8.12) поступает такое же управляющее воздействие, как и на реальный объект.
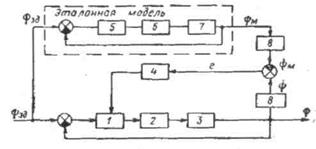
Рисунок 8.12 - Функциональная схема адаптивного авторулевого
I — авторулевой", 2 — рулевая машина; 3 — судно; 4 — блок адаптации; 5 — модель авторулевого; 6 – модель рулевой машины; 7 —модель судна;
8,9 - дифференцирующие блоки
С выхода модели снимается рассчитанный сигнал угловой скорости  , поворота судна. Осуществляется непрерывное сравнение фактической угловой скорости
, поворота судна. Осуществляется непрерывное сравнение фактической угловой скорости  поворота судна с угловой скоростью , где
поворота судна с угловой скоростью , где  — угол отклонения судна от заданного курса
— угол отклонения судна от заданного курса  . Разность
. Разность  используется для формирования корректирующего сигнала, на основании которого система адаптации выполняет автоматическую настройку параметром управления. Функциональная схема одной из возможных адаптивных САУ показана на рисунке 8.12.
используется для формирования корректирующего сигнала, на основании которого система адаптации выполняет автоматическую настройку параметром управления. Функциональная схема одной из возможных адаптивных САУ показана на рисунке 8.12.
В авторулевых второго и третьего типов используется дополнительный контур самонастройки, выполняющий следующие функции:
— получение информации о внешних воздействиях и динамических свойствах основного контура системы в. процессе работы;
— определение на основе полученной информации численного значения критерия качества;
— формирование соответствующего управляющего сигнала для обеспечения оптимального режима работы САУ при минимизации заданного критерия.
Функциональная схема подобных авторулевых показана на рисунке 8.3. Здесь СУ состоит из авторулевого и рулевой машины, а ОУ является судно.
В систему адаптации, представляющую специализированную ЭВМ, поступает информация от судового гирокомпаса, лага, гироскопического измерителя угловой скорости поворота судна , маятникового креномера, измеряющего период бортовой качки, а также значения заданного и истинного углов перекладки руля.
Данные, полученные от датчиков первичной информации, обрабатываются с помощью фильтра Калмана, служащего для выделения полезного сигнала управления на фоне помех, вызванных рысканием судна при волнении, а также для выработки оценок параметров движения судна, необходимых для оптимизации настройки авторулевого и прогнозирования желаемой реакции судна на управляющие воздействия. Алгоритм адаптации, т.е. порядок определения оптимальных значений параметров настройки авторулевого, следующий:
1) при выходе из порта определяются период бортовой качки судна и характеристики рыскания, вызванного волнением. Эти воздействия при расчете сигналов управления используются как помехи;
2) в качестве исходных принимаются значения коэффициентов пропорциональной и дифференциальной составляющих закона регулирования, рассчитанные по гидродинамическим характеристикам судна;
3) вычисляется сигнал управления, поступающий на рулевой привод;
4) в течение нескольких минут анализируется работа замкнутой системы и рассчитывается экономический критерий качества;
5) изменяются параметры авторулевого и анализируется их влияние на величину критерия;
6) вычисляется оптимальное соотношение параметров настройки, минимизирующее заданный критерий для данных условий плавания.
Процесс адаптации занимает около 20 мин и повторяется снова при изменении состояния ОУ или условий плавания.
Некоторые адаптивные авторулевые используют априорную информацию о динамике работы САУ движением судна по курсу в различных условиях плавания.
Наборы параметров управления, рассчитанные с помощью ЭВМ, хранятся в блоке памяти судового микрокомпьютера в виде матрицы, ее используют для обеспечения устойчивости судна на курсе при любом соотношении параметров.
Возможно решение оптимального управления движением судна по курсу па основе статистических методов. При этом поведение судна рассматривается как стационарный стохастический процесс и описывается с помощью многомерной модели, которая определяется процедурой поиска информационного критерия минимума. В адаптивных авторулевых получили распространение экономические критерии качества управления, обеспечивающие минимальный расход топлива на единицу пройденного расстояния
 ;
;
 ,
,
 ,
,
где  — весовые коэффициенты;
— весовые коэффициенты;  — угол перекладки руля.
— угол перекладки руля.
Применение адаптивных авторулевых с указанными критериями приводит к экономии топлива от 3 до 6%, в то время как при обычном авторулевом этот показатель не превышает 2 %. Аппаратная реализация критерия I 3 представляет значительные трудности. Введение адаптивных авторулевых не только приводит к экономии топлива, но и облегчает труд вахтенного помощника капитана, освобождая его от необходимости перенастройки параметров САУ, улучшает режим работы рулевого устройства в целом, что повышает его надежность и долговечность. Кроме того, автоматическая адаптация СУ судном с использованием ЭВМ может быть совмещена с решением навигационных задач, при этом адаптивный авторулевой может выполнять такие функции, как стабилизация судна на заданной траектории, поворот и маневрирование по заданной программе.
Рассмотрим адаптивный авторулевой «Rocal Decca DP-780», установленный на пароме «Ильич», который может работать в нескольких режимах.
1. Режим свободного движения в открытом море (критерий экономичного плавания). Основной задачей является минимизация сопротивления движению судна. Составляющими роста сопротивления движению судна являются центробежные силы F1 и сопротивление от отклонения руля при управлении F2. Кроме того, следует учитывать амплитуду  рыскания судна по курсу (отклонение судна от генерального курса). Критерий оценки качества стабилизации в этом случае принимается в виде
рыскания судна по курсу (отклонение судна от генерального курса). Критерий оценки качества стабилизации в этом случае принимается в виде
 (8.16)
(8.16)
где  — угловая скорость рыскания;
— угловая скорость рыскания;
— угол перекладки руля;
 — весовые коэффициенты.
— весовые коэффициенты.
Применение критерия (8.16) на практике затруднено из-за наличия помех в сигнале угловой скорости ,необходимости выбора весовых коэффициентов  и
и  .
.
Для ослабления помех вместо измеренного значения с высоким уровнем шумов используют оценку  высокочастотных внешних возмущений, действующих на судно, которые также можно отнести к разряду шумов. Помехи максимально фильтруются в фильтре Калмана.
высокочастотных внешних возмущений, действующих на судно, которые также можно отнести к разряду шумов. Помехи максимально фильтруются в фильтре Калмана.
Для выбора весовых коэффициентов и разработаны рекомендации. Так, при = 0 диапазон изменения в условиях спокойного моря варьируется от 0 до 1. Дальнейшее увеличение приводит к существенному снижению скорости судна. При наличии волнения моря для движения судна с минимальным сопротивлением коэффициент должен быть уменьшен до 0,5. Наименьшее значение необходимо принимать при направлении движения волн в борт судна.
2. Режим маневрирования (критерий маневрирования). Критерий выбирают, исходя из необходимости обеспечения максимального быстродействия
 .
.
Режим маневрирования состоит из трех фаз:
— разгон (набор угловой скорости судна);
— поворот с постоянной угловой скоростью (при больших угловых маневрах);
— торможение с выходом на новое направление движения.
При повороте вводится ограничение на предельно допустимую скорость циркуляции  . Введение ограничения на допустимую угловую скорость судна позволяет при движении в открытом море совершать поворот с минимальным сопротивлением движению, т.е. с малой потерей скорости.
. Введение ограничения на допустимую угловую скорость судна позволяет при движении в открытом море совершать поворот с минимальным сопротивлением движению, т.е. с малой потерей скорости.
В третьей фазе маневра важно, чтобы отсутствовало перерегулирование при выходе на новый курс.
3. Режим рыскания судна (критерий стабилизации траектории курса судна). Для обеспечения минимального рыскания судна по курсу весовые коэффициенты в критерии (8.16) должны быть другими, нежели в режиме экономического плавания. Наибольший весовой коэффициент должен быть у сигнала отклонения от траектории (коэффициент ) — рассогласования по курсу.
Применение такого критерия наиболее эффективно при прохождении узкостей, движении в ограниченных водах, расхождении со встречными судами, так как точность стабилизации приводит к существенному повышению безопасности плавания в сложных акваториях.
Адаптивный авторулевой «Rocal Decca DP-780» является авторулевым с эталонной нелинейной моделью движения судна вида
 ,
,
где аi и b — постоянные коэффициенты, в общем случае зависящие от условий эксплуатации судна.
Особенностью авторулевого является возможность раздельной перестройки параметров как при изменении динамических характеристик судна, так и при изменении состояния погоды. Это позволяет сократить амплитуду и частоту перекладки руля, а следовательно, понизить расход топлива и сократить время рейса,
Вопросы для самопроверки:
1. Для чего предназначены адаптивные САУ?
2. Какие функции выполняют адаптивные авторулевые?
3. В чем заключается алгоритм адаптации?
4. Назовите режимы движения судна в открытом море






