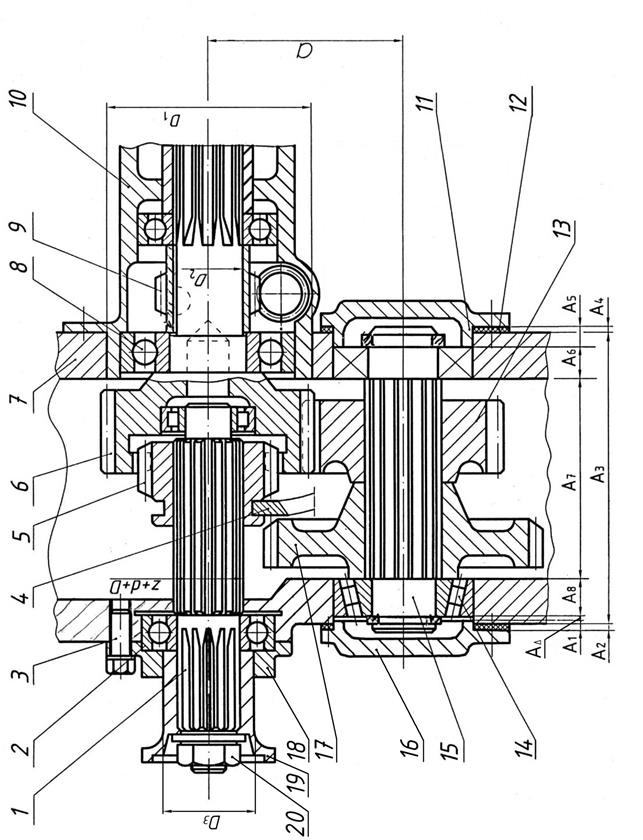
На рис. 1 представлен механизм привода вращательного движения звеньев манипулятора промышленного робота. Он выполнен в виде комбинированного червячно-зубчатого редуктора.
Параллельно работающие зубчатые передачи из колес 20 и 12 соединены с шестерней 15, которая выполнена заодно со ступицей червячного колеса и установлена на вал 5 с гарантированным зазором по D 3. Величина зазора оговорена заданием.
Обод червячного колеса 17 точно сцентрирован по D 2 относительно ступицы колеса 15, закреплен болтами и двумя коническими штифтами.
По D 1 шестерня 4 установлена на конце вала 2 по плотной посадке со шпонкой и закреплена шайбой с винтом.
Подшипники качения (поз. 3; 7; 10; 18), установленные на опорных шейках валов, допускают перегрузку до 150%, толчки и вибрации умеренные, режим работы – нормальный.
| № варианта
| Гладкие цилиндрические
соединения
| Подшипники качения
| Шпоночное соединение
|
| D 1
| D 2
| D 3
| S max
| S min
| Вал
ITd1 σ тех
| № поз
| Условное обозначе-
ние
| Радиальная нагрузка,
кН
| d
| b
|
| мм
| мкм
| мм
|
| 1
| 24
| 90
| 52
| 98
| 10
| 5
| 18
| 6-305
| 7,5
| 24
| 8
|
| 2
| 32
| 110
| 60
| 60
| 0
| 4
| 10
| 180608
| 36
| 32
| 10
|
| 3
| 36
| 120
| 45
| 90
| 10
| 4,5
| 7
| 6-7206А
| 20
| 36
| 10
|
| 4
| 30
| 135
| 48
| 90
| 10
| 4
| 3
| 5-307
| 40
| 30
| 8
|
| 5
| 36
| 118
| 42
| 52
| 8
| 5
| 10
| 160508
| 25
| 36
| 10
|
Исходные данные к рисунку 1
Резьбовое соединение
| №
варианта
| №
поз.
| Обозначение
резьбы
| Длина свинчива-ния
| d 2 изм
| D Р п
| Da/2пр
| Da/2лев
|
| мм
| мкм
| мин
|
| 1
| 11
| М6
| N
| 5,3
| 12
| +10
| +12
|
| 2
| 8
| М30´1,5
| S
| 29,28
| 12
| +20
| -5
|
| 3
| 19
| М10
| N
| 8,95
| 10
| +40
| 0
|
| 4
| 8
| М36´2
| S
| 34,57
| 6
| -30
| +10
|
| 5
| 13
| М8
| N
| 7,06
| 12
| +5
| -5
|

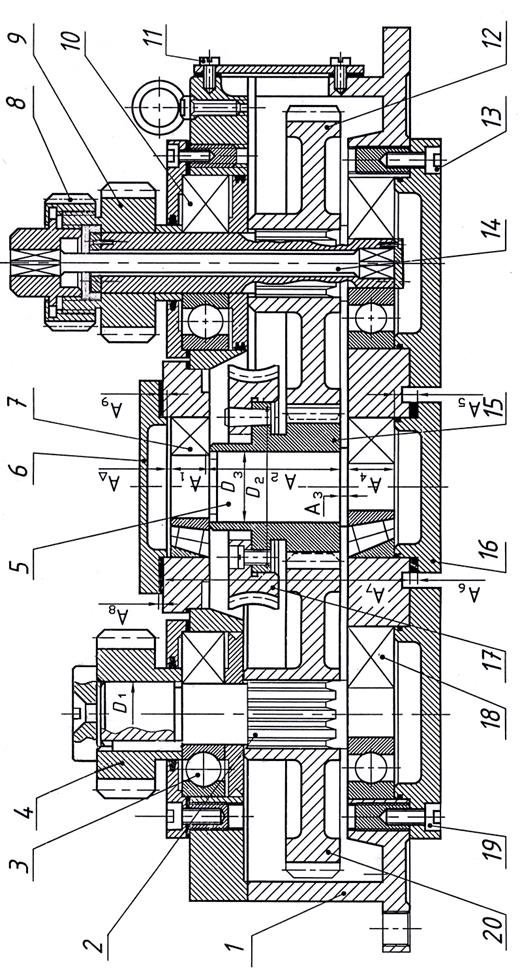
А.2. Часть раздаточной коробки автомобиля
На рис.2.2 изображена часть раздаточной коробки автомобиля; эта коробка служит для передачи крутящего момента к ведущим мостам автомобиля.
Левый конец вала 1 имеет подшипник 2, который закрыт крышкой 18, которая установлена на крыльчатке 19 по D 3 с незначительным зазором и крепится винтами 3 к корпусу 7. Величина зазора должна быть строго выдержана (оговорено заданием). Гайка 20, которая закрепляет крыльчатку, имеет короткую длину свинчивания.
На шлицевом валу 15 смонтированы промежуточное колесо 13 и зубчатое колесо 17 понижающей передачи. При положении, указанном на чертеже, включена прямая передача. При введении зубчатого колеса 5 в зацепление с зубчатым колесом 17, включается понижающая передача.
На хвостовике вторичного вала 6 по D 2 на сегментной шпонке с незначительным зазором установлено зубчатое колесо 9 привода спидометра.
В корпус 10 установлен подшипник 8 вторичного вала. Корпус 10 точно центрируется по D 1 в корпусе раздаточной коробки 7.
Подшипники качения испытывают умеренные толчки и вибрации и при работе имеют перегрузки до 300 %.
Исходные данные к рисунку 2
| № варианта
| Гладкие цилиндрические
Соединения
| Подшипники качения
| Шпоночное соединение
|
| D 1
| D 2
| D 3
| S max
| S min
| Вал.
ITd1 σ тех
| № поз
| Условное
обозначе-
ние
| Радиальная нагрузка, кН
| d
| b
|
| мм
| мкм
| мм
|
| 1
| 82
| 34
| 58
| 105
| 10
| 3,0
| 8
| 60207
| 8,0
| 34
| 10
|
| 2
| 80
| 40
| 65
| 110
| 30
| 4,0
| 14
| 7307А
| 9,0
| 40
| 12
|
| 3
| 80
| 36
| 90
| 125
| 35
| 5,0
| 8
| 60208
| 13,0
| 36
| 10
|
| 4
| 90
| 42
| 68
| 71
| 12
| 3,5
| 2
| 180608
| 38,0
| 42
| 12
|
| 5
| 98
| 42
| 70
| 85
| 10
| 4,5
| 8
| 60209
| 14,0
| 42
| 12
|
Резьбовое соединение
| №
варианта
| №
поз.
| Обозначение
резьбы
| Длина свинчива-ния
| d 2 изм
| D Р п
| Da/2пр
| Da/2лев
|
| мм
| мкм
| мин
|
| 1
| 20
| M20x2
| S
| 18,6
| 5
| +4
| -12
|
| 2
| 3
| M8
| N
| 7,05
| 8
| +5
| -10
|
| 3
| 3
| M6x0,75
| N
| 5,45
| 15
| -8
| +12
|
| 4
| 20
| M14x1,5
| S
| 12,9
| 10
| -10
| -2
|
| 5
| 20
| M18x1,5
| S
| 16,9
| 15
| +12
| +10
|