Вращение генератора вызывает вращение жесткого колеса с угловой скоростью соь (вариант I) или гибкого колеса с а>0 (вариант И).
Условимся называть: w0—размер деформирования, равный радиальному перемещению точки гибкого колеса по большой оси генератора; большая и малая оси генератора — большая и малая оси формы деформирования гибкого колеса в торцовом сечении.
§ 10.2. Кинематические параметры и принцип действия
Передаточное отношение найдем, используя метод Виллиса (см. § 8.15):

После преобразования получим:
 В простой передаче i равно отношению радиусов, а в волновой— отношению радиуса ведомого колеса к разности радиусов или к размеру деформирования w0.
В простой передаче i равно отношению радиусов, а в волновой— отношению радиуса ведомого колеса к разности радиусов или к размеру деформирования w0.
Очевидно, что разность радиусов можно выполнить малой, а /—большим. Большое i—одно из положительных качеств волновой передачи. Значение /тах для фрикционных передач
ограничивается точностью изготовления или допускаемыми отклонениями размеров диаметров. Практически выполняют 'max ^ ЮОО. Значение /min ограничивает прочность гибких колес, так как значение напряжения пропорционально размеру деформирования w0. При стальных гибких колесах /min^80. Ограничение /min- один из недостатков волновых передач.
По структуре волновая передача, так же как и планетарная, является трехзвенным механизмом. Она может работать не только в режиме редуктора или мультипликатора, но и в режиме дифференциала.
Метод Виллиса позволяет просто получить формулы для передаточных отношений, но не вскрывает принципа преобразования параметров движения путем деформирования гибкого звена механизма.
Действительно, в передачах с жесткими звеньями, например в простой фрикционной передаче, при вращении одного колеса точки его поверхности получают окружную скорость, и если к этому колесу прижать другое, то оно получит ту же окружную скорость, а угловые скорости колес будут обратно пропорциональны их радиусам.
Как же образуются окружные скорости в волновой передаче? Как вращение генератора передается жесткому колесу через невращающееся гибкое колесо?
Для того чтобы выяснить это, рассмотрим движение точек невращающегося гибкого колеса при его деформировании вращающимся генератором. Отметим, что в нашей конструкции гибкое колесо подобно оболочке (толщина значительно меньше других размеров).
| 52.Передаточное отношение и число зубьев зубчатой передачи
|
Как и следовало ожидать, получены прежние зависимости (10.2), но не по методу Виллиса, а по методу скоростей волнового деформирования. В дальнейшем этот метод позволит учесть еще и другие особенности кинематики волновых передач (см., например, § 10.4). Сопоставляя структурные схемы волновой передачи и ранее известных передач, можно отметить следующие принципиальные различия; все ранее известные механические передачи являются механизмами с жесткими звеньями; волновая передача содержит гибкое звено; во всех передачах с жесткими звеньями преобразование движения осуществляется или по принципу рычага, или по принципу наклонной плоскости. Принцип рычага используют в известных зубчатых, фрикционных, ременных и цепных передачах, где отношение радиусов колес функционально подобно отношению плеч рычага. По принципу наклонной плоскости работают червячные и винтовые передачи. В волновой передаче преобразование движения осущестяляется путем деформирования гибкого звена. Этот новый принцип назовем принципом деформирования. Сущность этого принципа в том, что при волновом деформировании гибкого колеса всем его точкам сообщаются окружные скорости. При контакте гибкого колеса с жестким по гребням волн окружные скорости волновых перемещений сообщаются жесткому колесу (или гибкому), как ведомому звену передаточного механизма. § 10.3. Передаточное отношение и число зубьев зубчатой передачи Схема зубчатой передачи подобна фрикционной (см. рис. 10.1). Только здесь жесткое колесо имеет внутренние, а гибкое — наружные зубья (рис. 10.4). Гибкое колесо дефор- 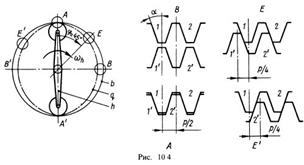 мируют так, что в точках В между вершинами зубьев образуется радиальный зазор, а в точках А зубья зацепляются на полную рабочую высоту, в точках Ε зацепление промежуточное. Для зацепления необходимо равенство модулей зубьев обоих колес. мируют так, что в точках В между вершинами зубьев образуется радиальный зазор, а в точках А зубья зацепляются на полную рабочую высоту, в точках Ε зацепление промежуточное. Для зацепления необходимо равенство модулей зубьев обоих колес.  Передаточное отношение. Положим, что в формулах (10.2) dg и db делительные диаметры Число зубьев. На рис. 10.4 изображены различные фазы зацепления. Здесь прямолинейный профиль зубьев принят условно, в целях простоты рассуждений. При вращении генератора осуществляется относительный поворот g и при котором зубья колеса g должны переходить из одной впадины в другую. Для этого необходимо расцепление зубьев в точке В. Передаточное отношение. Положим, что в формулах (10.2) dg и db делительные диаметры Число зубьев. На рис. 10.4 изображены различные фазы зацепления. Здесь прямолинейный профиль зубьев принят условно, в целях простоты рассуждений. При вращении генератора осуществляется относительный поворот g и при котором зубья колеса g должны переходить из одной впадины в другую. Для этого необходимо расцепление зубьев в точке В.
|
| 53.Относительное движение зубьев, выбор профиля и размеров зубьев
|
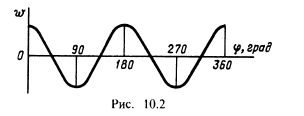
Примечание. Формула (10.16) не противоречит основному закону зацепления, требующему равенства проекций скоростей зубьев на общую нормаль NN в точке контакта. В нашем случае vtcosav + vrsmaLy = vtbcosaLy Разделив на cosay, с учетом (10.15) получим формулу (10.16). Условие равенства скоростей используют для выбора параметров зацепления. Например, из формул (10.16) и (10.15) получим зависимость для определения угла профиля в любой точке контакта (при любом φ):  Ранее показано, что значение и направление скоростей vt и vr изменяются в зависимости от угла φ. При φ = 0 vt — максимум, vr = 0. Относительного движения зубьев нет. Передача движения осуществляется без скольжения. Угол профиля зуба может быть любым, в том числе равным нулю. При ср%45° vt = 0, vr — максимум. Нет переносного движения. Движение передается только через клиновой эффект и сопровождается скольжением, угол <ху — по формуле (10.17). Например, при w = vv0cos2(p и φ = 45° получим ау = 26°40'. При 45°<φ<90° vt становится отрицательной, vr уменьшается от максимума до нуля, передача движения возможна только за счет клинового эффекта при больших углах сиу (при φ->90°, ау-^90°). Для уменьшения износа зубьев и потерь на трение в зацеплении выгодно уменьшать использование клинового эффекта. С этой целью параметры зацепления следует выбирать так, чтобы зацепление осуществлялось преимущественно в зоне малых углов φ (в зоне большой оси генератора). § 10.5. Относительное движение зубьев, выбор профиля и размеров зубьев Разработано несколько профилей зубьев для волновых передач. Преимущественное распространение получили эвольвентные зубья, как наиболее технологичные и обеспечивающие удовлетворительное зацепление. При большом числе зубьев волновых передач (обычно ζ >150) форма эвольвентного зуба близка к трапецеидальному. При использовании распространенного двадцатиградусного исходного контура угол профиля α варьируют путем смещения инструмента при нарезании, приспосабливая его к условиям зацепления. Синтез зацепления выполняют на основе анализа относительного движения зубьев. На рис. 10.3 изображена траектория движения точки срединной поверхности гибкого колеса. Уравнения этой траектории можно использовать для построения графика относительного движения зубьев в процессе зацепления.
Ранее показано, что значение и направление скоростей vt и vr изменяются в зависимости от угла φ. При φ = 0 vt — максимум, vr = 0. Относительного движения зубьев нет. Передача движения осуществляется без скольжения. Угол профиля зуба может быть любым, в том числе равным нулю. При ср%45° vt = 0, vr — максимум. Нет переносного движения. Движение передается только через клиновой эффект и сопровождается скольжением, угол <ху — по формуле (10.17). Например, при w = vv0cos2(p и φ = 45° получим ау = 26°40'. При 45°<φ<90° vt становится отрицательной, vr уменьшается от максимума до нуля, передача движения возможна только за счет клинового эффекта при больших углах сиу (при φ->90°, ау-^90°). Для уменьшения износа зубьев и потерь на трение в зацеплении выгодно уменьшать использование клинового эффекта. С этой целью параметры зацепления следует выбирать так, чтобы зацепление осуществлялось преимущественно в зоне малых углов φ (в зоне большой оси генератора). § 10.5. Относительное движение зубьев, выбор профиля и размеров зубьев Разработано несколько профилей зубьев для волновых передач. Преимущественное распространение получили эвольвентные зубья, как наиболее технологичные и обеспечивающие удовлетворительное зацепление. При большом числе зубьев волновых передач (обычно ζ >150) форма эвольвентного зуба близка к трапецеидальному. При использовании распространенного двадцатиградусного исходного контура угол профиля α варьируют путем смещения инструмента при нарезании, приспосабливая его к условиям зацепления. Синтез зацепления выполняют на основе анализа относительного движения зубьев. На рис. 10.3 изображена траектория движения точки срединной поверхности гибкого колеса. Уравнения этой траектории можно использовать для построения графика относительного движения зубьев в процессе зацепления. 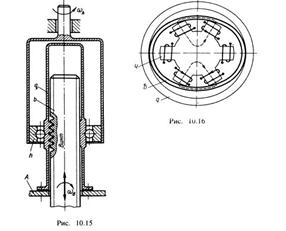 На рис. 10.16 показано взаимное положение зубьев на малой оси генератора в момент времени г = 0. Штриховой линией изображено положение зуба колеса g до деформирования. Здесь г — радиус срединной поверхности; ось η совпадает с осями симметрии гаъ — радиусы окружностей вершин зубьев; rfg, rfb — радиусы окружностей впадин. На рис. 10.16 показано взаимное положение зубьев на малой оси генератора в момент времени г = 0. Штриховой линией изображено положение зуба колеса g до деформирования. Здесь г — радиус срединной поверхности; ось η совпадает с осями симметрии гаъ — радиусы окружностей вершин зубьев; rfg, rfb — радиусы окружностей впадин.
|





