Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Топ:
Установка замедленного коксования: Чем выше температура и ниже давление, тем место разрыва углеродной цепи всё больше смещается к её концу и значительно возрастает...
Генеалогическое древо Султанов Османской империи: Османские правители, вначале, будучи еще бейлербеями Анатолии, женились на дочерях византийских императоров...
Определение места расположения распределительного центра: Фирма реализует продукцию на рынках сбыта и имеет постоянных поставщиков в разных регионах. Увеличение объема продаж...
Интересное:
Искусственное повышение поверхности территории: Варианты искусственного повышения поверхности территории необходимо выбирать на основе анализа следующих характеристик защищаемой территории...
Национальное богатство страны и его составляющие: для оценки элементов национального богатства используются...
Подходы к решению темы фильма: Существует три основных типа исторического фильма, имеющих между собой много общего...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Задание 4
По заданным техническим характеристикам грузоподъемного крана (табл.4.4) выполнить следующее:
определить мощность крановых механизмов и выбрать электродвигатели по каталогу;
выбрать типовую схему электропривода для заданного механизма, дать техническое описание схемы и электрооборудования, которое имеется в схеме;
рассчитать и выбрать пуско-тормозные и регулировочные резисторы для выбранной схемы электропривода.
Исходные данные:
Q – грузоподъемность, т;
e - относительная продолжительность включения крановых механизмов;
VП – скорость подъема груза, м/с;
VГ – скорость горизонтального передвижения крана;
VТ – скорость передвижения тележки, м/с;
nк – скорость поворота крана, об/мин.
Задание 5
Для питания электроприводов механизмов подъемного крана из задания 4 (п.п. 4.4) выполнить следующее:
определить сечение жил питающего кабеля от трансформаторно-распределительной подстанции до крана по допустимому нагреву; проверить выбранное сечение жил кабеля по допустимой потере напряжения (расстояние между трансформаторно-распределительной подстанцией и краном l = 50+№ варианта, м); выбрать кабель;
выбрать автоматические выключатели для защиты электроприводов механизмов от короткого замыкания и перегрузки; определить токи уставок расцепителей;
предусмотреть мероприятия по обеспечению электробезопасности и экономии электроэнергии при эксплуатации крана.
Таблица 4.4
Исходные данные к заданию 5
| №№ п/п | Тип крана | Q,т | Режим группа крана | Механизм подъема | Механизм передвижения | ||||
| крана | тележки | ||||||||
| e | VП, м/с | e | VГ, м/с | e | VТ, м/с | ||||
| мостовой | 3К | 0,25 | 0,2 | 0,25 | 0,6 | 0,25 | 0,35 | ||
| козловой | 6,3 | 3К | 0,25 | 0,22 | 0,25 | 0,7 | 0,25 | 0,4 | |
| башенный | 3К | 0,25 | 0,15 | 0,25 | 0,5 | 0,25 | 0,3 | ||
| портальный | 6К | 0,4 | 0,3 | 0,4 | 0,9 | 0,4 | 0,4 | ||
| мостовой | 3К | 0,25 | 0,15 | 0,25 | 0,8 | 0,25 | 0,5 | ||
| козловой | 4К | 0,4 | 0,15 | 0,4 | 0,8 | 0,4 | 0,45 | ||
| башенный | 4К | 0,4 | 0,2 | 0,4 | 0,6 | 0,4 | 0,3 | ||
| портальный | 7К | 0,4 | 0,2 | 0,4 | 0,6 | 0,4 | 0,4 | ||
| мостовой | 4К | 0,4 | 0,2 | 0,25 | 0,25 | 0,6 | |||
| козловой | 5К | 0,4 | 0,22 | 0,4 | 0,9 | 0,4 | 0,55 | ||
| башенный | 4К | 0,4 | 0,3 | 0,25 | 0,5 | 0,25 | 0,4 | ||
| портальный | 7К | 0,4 | 0,3 | 0,4 | 0,6 | 0,4 | 0,5 | ||
| мостовой | 3К | 0,25 | 0,2 | 0,25 | 0,5 | 0,25 | 0,2 | ||
| козловой | 7К | 0,4 | 0,3 | 0,4 | 1,2 | 0,4 | 0,6 | ||
| башенный | 4К | 0,4 | 0,2 | 0,25 | 0,6 | 0,25 | 0,3 | ||
| портальный | 8К | 0,6 | 0,5 | 0,4 | 0,6 | 0,4 | 0,4 | ||
| мостовой | 4К | 0,4 | 0,3 | 0,25 | 0,7 | 0,25 | 0,4 | ||
| козловой | 12,5 | 5К | 0,4 | 0,28 | 0,4 | 0,9 | 0,4 | 0,5 | |
| башенный | 7К | 0,5 | 0,25 | 0,4 | 1,3 | 0,4 | 0,7 | ||
| портальный | 8К | 0,4 | 0,3 | 0,4 | 0,7 | 0,4 | 0,6 | ||
| мостовой | 5К | 0,4 | 0,16 | 0,4 | 1,2 | 0,4 | 0,7 | ||
| козловой | 5К | 0,4 | 0,2 | 0,4 | 0,9 | 0,4 | 0,6 | ||
| башенный | 12,5 | 6К | 0,4 | 0,4 | 0,4 | 0,65 | 0,4 | 0,6 | |
| портальный | 6,3 | 4К | 0,4 | 0,2 | 0,25 | 0,6 | 0,25 | 0,4 | |
| козловой | 5К | 0,4 | 0,2 | 0,4 | 0,8 | 0,4 | 0,5 | ||
| мостовой | 3К | 0,25 | 0,3 | 0,25 | 0,6 | 0,25 | 0,35 | ||
| башенный | 6,3 | 4К | 0,4 | 0,2 | 0,25 | 0,7 | 0,25 | 0,4 | |
| мостовой | 6К | 0,4 | 0,3 | 0,4 | 0,5 | 0,4 | 0,5 | ||
| портальный | 6К | 0,4 | 0,25 | 0,4 | 0,9 | 0,4 | 0,45 | ||
| козловой | 6,3 | 3К | 0,25 | 0,2 | 0,25 | 0,8 | 0,25 | 0,5 | |
| мостовой | 7К | 0,3 | 0,3 | 0,4 | 0,8 | 0,4 | 0,63 | ||
| башенный | 7К | 0,4 | 0,3 | 0,4 | 0,6 | 0,25 | 0,5 | ||
| штабелер | 5К | 0,4 | 0,25 | 0,4 | 0,6 | 0,4 | 0,45 | ||
| портальный | 6К | 0,4 | 0,2 | 0,4 | 0,4 | 0,6 | |||
| козловой | 5К | 0,4 | 0,35 | 0,4 | 0,9 | 0,4 | 0,5 | ||
| мостовой | 7К | 0,3 | 0,3 | 0,4 | 0,5 | 0,4 | 0,58 | ||
| металлург. | 8К | 0,25 | 0,3 | 0,4 | 0,6 | 0,4 | 0,6 | ||
| козловой | 5К | 0,4 | 0,2 | 0,4 | 0,5 | 0,4 | 0,5 | ||
| башенный | 6,3 | 3К | 0,25 | 0,25 | 0,25 | 1,2 | 0,25 | 0,4 | |
| штабелер | 3,2 | 3К | 0,25 | 0,3 | 0,25 | 0,6 | 0,25 | 0,35 | |
| козловой | 12,5 | 5К | 0,3 | 0,35 | 0,4 | 0,6 | 0,4 | 0,55 | |
| мостовой | 5К | 0,4 | 0,4 | 0,4 | 0,7 | 0,4 | 0,6 | ||
| мостовой | 7К | 0,4 | 0,4 | 0,4 | 0,9 | 0,4 | 0,8 | ||
| козловой | 6К | 0,3 | 0,3 | 0,4 | 1,3 | 0,4 | 0,5 | ||
| башенный | 4К | 0,4 | 0,4 | 0,25 | 0,7 | 0,25 | 0,4 | ||
| козловой | 7К | 0,4 | 0.5 | 0,4 | 0.8 | 0,4 | 0.6 | ||
| мостовой | 8К | 0,3 | 0,35 | 0,4 | 0,9 | 0,4 | 0,5 | ||
| козловой | 7К | 0,4 | 0,25 | 0,3 | 0,65 | 0,4 | 0,6 | ||
| мостовой | 3К | 0,25 | 0,2 | 0,25 | 0,6 | 0,25 | 0,35 | ||
| мостовой | 5К | 0,4 | 0,3 | 0,4 | 0,8 | 0,4 | 0,55 |
ОСНОВЫ ЭЛЕКТРОПРИВОДА
|
|
|
|
Расчёт мощности и выбор электродвигателя
Выбор электродвигателя для какого-либо производственного механизма связан с выбором системы электропривода отвечающей техническим требованиям и экономическим показателям. В свою очередь, надёжность работы электропривода и его экономичность зависят от правильного определения мощности двигателя. Завышение мощности двигателя по сравнению с нагрузкой приводит к излишним капитальным затратам, снижению КПД и коэффициента мощности электропривода. Занижение мощности двигателя по сравнению с нагрузкой приводит к перегреву обмоток двигателя.
Нагрев электропривода возможен лишь до определённых пределов, ограничиваемых допустимой температурой изоляционных материалов. По допустимой температуре изоляционные материалы делятся на шесть классов от 105°С до 180°С. Так, изоляция класса А допускает температуру нагрева до 105°С, класса В – до 130°С, класса F – до 155°С, класса H – до 180°С. Эта температура установлена, исходя из обеспечения требуемого срока службы 15-20 лет при номинальной нагрузке.
Температура двигателя зависит не только от нагрузки, но и от температуры окружающей среды. Для электродвигателей, работающих в общепромышленных установках, она принята равной 40°С. Разность между температурой двигателя и окружающей среды называется превышением температуры.
Температура обмоток двигателя или её превышение над температурой окружающей среды является одним из главных критериев выбора мощности. Перегрев обмоток резко снижает срок службы электродвигателей.
Другим условием выбора является способность двигателя работать в условиях перегрузки и при пуске в ход.
Расчёт и проверку мощности двигателя, выбранного предварительно, производят на основании его нагрузочной диаграммы.
Длительный режим
В режиме S1, когда нагрузка остаётся неизменной, а температура окружающей среды не отличается от принятой по ГОСТу (40°С), определение мощности сводится к выбору его по каталогу из следующего условия для мощности двигателя:
|
|
Рном ≥ Рн (1.19)
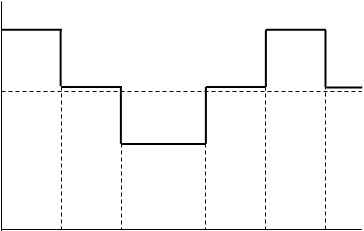
При переменной нагрузке и продолжительном включении выбор двигателя усложняется. Проверка выбранного предварительно двигателя может быть выполнена через мощность тепловыделения, которая оценивается по величине мощности средних потерь в электродвигателе ΔРСР. В этом случае используется нагрузочная диаграмма мощности P(t) (рис.1.8).
 , (1.20)
, (1.20)
где ΔРi - мощность потерь в электродвигателе на i – том участке нагрузочной диаграммы,
 ; (1.21)
; (1.21)
Рi - мощность электродвигателя на i – том участке нагрузочной диаграммы;
ηi – коэффициент полезного действия электродвигателя на i – том участке нагрузочной диаграммы.
Средние потери за цикл не должны превышать потерь в двигателе при номинальной нагрузке:
ΔРСР ≤ ΔРНОМ
Для метода средних потерь требуется зависимость КПД электродвигателя от нагрузки η = f(P).
Метод эквивалентных величин менее точен, так как основывается на более грубых допущениях. Он относительно прост и широко используется на практике. Для этого требуется зависимость тока I(t) или нагрузочные диаграмм либо мощности Р(t) либо момента M(t). Можно использовать зависимость тока I(t). По известным из нагрузочных диаграмм переменным мощностям P(t), или моментам M(t), или токам I(t) определяют их эквивалентные величины:
 ; (1.23)
; (1.23)
 ; (1.24)
; (1.24)
 (1.25)
(1.25)
P P1 P1
P2 Pn Pэкв
…
t1 t2 tn t
Рис.1.8. Нагрузочная диаграмма Р(t) для продолжительного режима работы |
После вычислений выбор двигателя осуществляется по каталогу из условия:
Pном ³ Рэкв; или Мном ³ Мэкв; или Iном ³ Iэкв. (1.26)
Выбранные двигатели проверяются по перегрузочной способности. Максимальный момент, развиваемый двигателем Мmax должен превышать максимально возможный момент нагрузки (Мmax > Mнmax). Пусковой момент двигателя Mп должен превышать момент нагрузки при пуске (Мп>M). В каталогах приводятся вместе с номинальными данными двигателя либо максимальный и пусковой моменты, либо коэффициенты, позволяющие их определить:
Км=Мmax / Мном, Кп=Мп / Мном.
Для асинхронных двигателей необходимо учитывать возможность снижения напряжения сети. ГОСТ допускает снижение напряжения на выводах двигателей до 5%. На практике учитывается вероятность снижения напряжения в сети до 10%. Так как момент вращения асинхронных двигателей пропорционален квадрату напряжения, то перегрузочная способность и способность пуска под нагрузкой устанавливается из условия:
|
|
0,8Мmax ≥ Мс; 0,8 Мп > Мс. (1.27)
Последнее условие применимо только для асинхронных двигателей с короткозамкнутым ротором. Если указанные условия не выполняются, то выбирают двигатель большей мощности.
Предварительное определение мощности двигателя
Для предварительного определения мощности двигателя необходимо определить режим работы механизма (см.табл.2.1, 2.2, 2.3). По заданному диапазону регулирования скорости механизма, числу включений в час и другим параметрам выбирается управляющее устройство двигателя и его вид (см. табл. 2.4). Находится расчетная статическая мощность Рст. К статическим нагрузкам относят нагрузки установившегося движения крановых механизмов при подъеме, спуске и перемещении грузов.
Статическая мощность на валу электродвигателя подъемной лебедки при подъеме груза определяется по формуле:
 кВт, (2.1)
кВт, (2.1)
где Q — масса поднимаемого груза, кг;
q — масса поднимаемого груза,;крюковой подвески, захвата, спредера, грейфера или грузоподъемного магнита, кг;
g = 9,81 – ускорение свободного падения кг/м2;
vп — номинальная скорость подъема груза, м/с;
 — КПД канатной системы и механизма при подъеме номинального груза;
— КПД канатной системы и механизма при подъеме номинального груза;
mп —коэффициент числа механизмов, поднимающих груз.
Для разных кранов коэффициент mп принимает следующие значения:
Крюковой кран с одной лебедкой подъема ………………………………1
Крюковой кран с двумя лебедками подъема и общим грузовым канатом
(контейнерные краны, краны со специальными захватами)……………..2
Крюковой кран с двумя лебедками и двумя независимыми подъемными
канатами и общей траверсой …………..………………………………..1,8
Грейферный кран:
для замыкающей лебедки в процессе замыкания грейфера..…………….1
при подъеме груженого грейфера совместно с замыкающей лебедкой…1,8
Статическая мощность на валу электродвигателя механизма горизонтального передвижения крана (тележки) определяется по следующим формулам (кВт): механизм работает в помещении при отсутствии ветровой нагрузки
 (2.2)
(2.2)
где G — масса передвигающегося механизма (крана, тележки), Н;
vг— скорость передвижения груза, м/с;
— КПД механизма;
 — коэффициент трения в подшипниках ступиц колес, для подшипников качения =0,015;
— коэффициент трения в подшипниках ступиц колес, для подшипников качения =0,015;
Dk — диаметр ходового колеса, м;
dст — диаметр ступицы ходового колеса, м; обычно для расчетов принимается dст/Dk = 0,25;
|
|
 — коэффициент трения качения,
— коэффициент трения качения,  м;
м;
Крб — коэффициент формы ходового колеса, учитывающий трение реборд ходового колеса, Крб = 1,3 -1,4;
mк — число механизмов передвижения;
 — уклон рельсового пути тележки или крана, при расчете мостовых кранов принимается =0,003, для строительных кранов = 0,01.
— уклон рельсового пути тележки или крана, при расчете мостовых кранов принимается =0,003, для строительных кранов = 0,01.
При подстановке в (2.2) приведенных усредненных значений параметров имеем:
 ,кВт. (2.3)
,кВт. (2.3)
Механизм работает на открытом воздухе:
 ,кВт, (2.4)
,кВт, (2.4)
где WВ — среднее усилие, воздействующее на механизмы крана и груза от ветра. В соответствии с ГОСТ 1451-77 ветровая нагрузка на кран WВ определяется по формуле: WB=pSK;
SK - площадь парусности, м2;
р — давление на конструкции крана и груза, p=qkBCcn1, Па;
q — давление ветра на высоте 10 м, q=ρvB2;
kBC—коэффициент высоты;
c- коэффициент лобового сопротивления;
n1 — коэффициент нагрузки;
ρ— плотность воздуха, ρ = 1,225 кг/м3;
vB— скорость ветра у земли, м/с.
Для рабочего состояния кранов, используемых во всех зонах, кроме морских побережий, принимается q =125 Па, соответственно коэффициенты kBC=1,25; c=1; n1 = 1. Таким образом, расчетное давление от ветра принимается р = 160 Па.
Площадь парусности крана (тележки) с достаточной точностью можно принять  . Площадь парусности груза может быть определена по формуле
. Площадь парусности груза может быть определена по формуле  .
.
Подстановка значений р и SK в (2.4) дает
 . (2.5)
. (2.5)
Эта формула может быть использована для определения мощности механизмов кранов любого типа, кроме судовых кранов или кранов, работающих в портах.
Для мостовых кранов грузоподъемностью 5—50 т общего назначения и козловых кранов грузоподъемностью 5—20 т, работающих на открытом воздухе, может быть использована простая, но достаточно верная формула определения мощности статической нагрузки
 . (2.6)
. (2.6)
Для строительных башенных кранов наибольшая мощность статической нагрузки при скорости ветра 15 м/с может быть определена по формуле
 (2.7)
(2.7)
Статическая мощность на валу электродвигателя механизма поворота стрелового крана в общем виде можно найти по формуле
 , (2.8)
, (2.8)
где G — масса поворотной части крана, кг;
n — частота вращения крана, об/мин;
 — коэффициент трения поворотного круга, = 0,01;
— коэффициент трения поворотного круга, = 0,01;
Dкр — диаметр поворотного круга, м;
l — вылет стрелы (размер от оси вращения до оси подъемного каната), м;
γ — угол направления ветра к наветренной площади груза; при определении максимальной мощности статической нагрузки принимается sin γ = 1, при определении среднеквадратичной нагрузки sin γ = 0,8;
β — уклон пути крана, для портальных кранов β = 0,006, для башенных кранов β = 0,01, для судовых кранов β = 0,04;
mВР— число механизмов поворота;
3,2 — коэффициент, учитывающий давление ветра на груз при скорости ветра 15 м/с.
Для механизмов поворота тележек специальных кранов или захватов
 , кВт, (2.9)
, кВт, (2.9)
здесь kn — коэффициент, учитывающий увеличение сопротивления поворота от уклона тележки на путях, kn = 2,2.
Статическая мощность на валу электродвигателя механизма изменения вылета стрелы в общем виде может быть определена по формуле
 , кВт, (2.10)
, кВт, (2.10)
где G — масса перемещаемых конструкций стреловой части крана, кг;
vс, г — скорость горизонтального перемещения груза, м/с;
vС, В — скорость вертикального перемещения груза, м/с.
Статическая мощность на валу электродвигателя механизмов специальных захватов, толкателей, выдвижных устройств может быть определена по формуле:
 , кВт, (2.11)
, кВт, (2.11)
где Fcp — среднее усилие при перемещении рабочего органа, Н;
v — скорость перемещения, м/с.
При этом Fmax механизма, работающего на упор, должно приниматься не более 2Fcр.
Для рассчитанной статической мощности механизма на первом предварительном по каталогу выбирается электродвигатель. На этом этапе выбор мощности двигателя может выполняться из условия:
Pном ≥ Рст/kт, (2.12)
где kт – коэффициент, учитывающий режим работы механизма, вид управляющего устройства и электропривода (табл. 2.5).
Предварительный выбор электродвигателя может выполняться также исходя из расчетной мощности РР:
Рном ≥ РР. (2.13)
Расчетная мощность Рр определяется из условий обеспечения пускового режима [3]. В данном пособии эта методика не рассматривается.
На втором этапе выбранный двигатель проверяется по тепловому режиму для конкретных условий работы.
Таблица 2.1
Характеристика механизмов грузоподъемных машин по группам режима работы
| Группа режима | Характеристика режима | Механизмы |
| 1, 2, 3 | Работа с большими перерывами, редкая работа с номинальным грузом, с малыми скоростями и малым числом включений (до 60 в час) аппаратуры управления и электродвигателей, с малой ПВ относительной продолжительностью включения. | Механизмы вспомогательного назначения: механизмы подъема и передвижения ремонтных кранов, работающих в машинных залах; механизмы передвижения строительных и портальных кранов, мостовых перегружателей и башен кабельных кранов; и другие редко работающие механизмы |
| Работа с грузами различной массы со средними скоростями, средним числом включений (до 120 в час), средней ПВ | Механизмы подъема и передвижения кранов механических и сборочных цехов заводов со среднесерийным производством; механизмы поворота строительных кранов; механизмы монтажных кранов на строительстве | |
| Постоянная работа с грузами, близкими по массе к номинальным, с высокими скоростями, большим числом включений (до 240 в час), высокой ПВ | Механизмы технологических кранов, цехов и складов на заводах с крупносерийным производством, кранов литейных цехов и механизмы подъема строительных кранов, подъема, поворота и изменения вылета портальных кранов | |
| Постоянная работа с грузами номинальной массы с высокими скоростями, большим числом включений (до 600 в час), высокой ПВ | Механизмы технологических кранов металлургического производства; механизмы подъема и передвижения тележек рудных и угольных перегружателей; механизмы грейферных, магнитных и складских кранов металлургических заводов; механизмы подъема, поворота и изменения вылета грейферных портальных кранов | |
| Примечание. Режим работы крана в целом и основных металлоконструкций крана определяется режимом работы механизма главного подъема. |
Таблица 2.2
Соответствие групп режима работы механизмов
| Группа режима работы механизмов по ГОСТ 25835 – 83 | 1М | 2М, 3М | 4М | 5М | 6М |
| Режим работы согласно Правилам Госгортехнадзора | Ручной | Л | С | Т | ВТ |
Таблица 2.3
Различные режимы работы электрооборудования
| Режим работы | Коэффициент использования | ПВ,% | Число включений в час | Температура окруж. среды, ºС | ||
| по грузоподъемности К гр | по времени | |||||
| в течение года К г | в течение суток К с | |||||
| Легкий (Л) | 1,00 — 0,75 0,50 0,25 0,10 | Нерегулярная редкая работа | ||||
| 0,25 0,50 1,00 | 0,33 0,67 1,00 | |||||
| Средний (С) | 1,00 0,75 0,50 0,25 0,10 | 1,00 0,50 0,50 1,00 1,00 | 0,67 0,33 0,67 1,00 1,00 | |||
| Тяжелый (Т) | 1,00 1,00 0,75 0,50 0,25 | 1,00 1,00 0,75 1,00 1,00 | 0,67 0,33 0,67 1,00 1,00 | |||
| Весьма тяжелый (ВТ) | 1,00 0,75 0,50 0,25 0,10 | 1,00 | 1,00 | 300– 600 | ||
| П р и м е ч а н и е. При повышении указанных показателей электрооборудование должно быть отнесено к группе более тяжелого режима работы. |
Таблица 2.4
Технические данные электропривода с управляющими устройствам
| Виды электропривода с управляющими устройствами | Мощ-ность, кВт | Диапазон регулирования скорости: | Число включений | Режим работы меха-низма | ||||
| ниже nНОМ | выше nНОМ | допуст в час | до кап-ремонта | |||||
| Асинхронный двигатель с фазным ротором | Кулачковый контроллер | 2–30 | 1: 3 | — | 0,3·106 | Л, С | ||
| Магнитный контроллер | 2–180 | 1: 5 (1: 8) | — | 600·106 | С, Т, ВТ | |||
| Тиристорн. преобразователь напряжения | 2–180 | 1: 10 | — | 10·106 | Т, ВТ | |||
| Асинхронный двигатель с КЗ ротором | односкоростной | Кулачковый контроллер; магнитный пускатель | 2–15 | 1: 1 | — | 0,3·106 | Л, С | |
| Тиристорн. преобразователь частоты | 20–100 | 1: 10 | 2: 1 | 20·106 | ВТ | |||
| Двух - | Магнитный контроллер | 2–40 | 1: 6 | — | (0,3÷10) ·106 | Т, ВТ | ||
| Тиристорн. преобразователь частоты | 2–80 | 1: 8 (1: 60) | — | 106 | Т, ВТ | |||
| Электродвигатель постоянного тока | Кулачковый контроллер | 3–15 | 1: 4 | 2: 1 | 0,3·106 | Л, С | ||
| Магнитный контроллер | 3–150 | 1: 6 | 2,5: 1 | 106 | С, Т, ВТ | |||
| Система генератор–двигатель | 20–180 | 1: 10 | 2,5: 1 | 2,0·106 | Т, ВТ | |||
| Система управляе-мый выпрямитель–двигатель | 50–300 | 1: 10 | 2,5: 1 | (10÷20) · ·106 | Т, ВТ |
2.1.2.
Задание 4
По заданным техническим характеристикам грузоподъемного крана (табл.4.4) выполнить следующее:
определить мощность крановых механизмов и выбрать электродвигатели по каталогу;
выбрать типовую схему электропривода для заданного механизма, дать техническое описание схемы и электрооборудования, которое имеется в схеме;
рассчитать и выбрать пуско-тормозные и регулировочные резисторы для выбранной схемы электропривода.
Исходные данные:
Q – грузоподъемность, т;
e - относительная продолжительность включения крановых механизмов;
VП – скорость подъема груза, м/с;
VГ – скорость горизонтального передвижения крана;
VТ – скорость передвижения тележки, м/с;
nк – скорость поворота крана, об/мин.
Задание 5
Для питания электроприводов механизмов подъемного крана из задания 4 (п.п. 4.4) выполнить следующее:
определить сечение жил питающего кабеля от трансформаторно-распределительной подстанции до крана по допустимому нагреву; проверить выбранное сечение жил кабеля по допустимой потере напряжения (расстояние между трансформаторно-распределительной подстанцией и краном l = 50+№ варианта, м); выбрать кабель;
выбрать автоматические выключатели для защиты электроприводов механизмов от короткого замыкания и перегрузки; определить токи уставок расцепителей;
предусмотреть мероприятия по обеспечению электробезопасности и экономии электроэнергии при эксплуатации крана.
Таблица 4.4
Исходные данные к заданию 5
| №№ п/п | Тип крана | Q,т | Режим группа крана | Механизм подъема | Механизм передвижения | ||||
| крана | тележки | ||||||||
| e | VП, м/с | e | VГ, м/с | e | VТ, м/с | ||||
| мостовой | 3К | 0,25 | 0,2 | 0,25 | 0,6 | 0,25 | 0,35 | ||
| козловой | 6,3 | 3К | 0,25 | 0,22 | 0,25 | 0,7 | 0,25 | 0,4 | |
| башенный | 3К | 0,25 | 0,15 | 0,25 | 0,5 | 0,25 | 0,3 | ||
| портальный | 6К | 0,4 | 0,3 | 0,4 | 0,9 | 0,4 | 0,4 | ||
| мостовой | 3К | 0,25 | 0,15 | 0,25 | 0,8 | 0,25 | 0,5 | ||
| козловой | 4К | 0,4 | 0,15 | 0,4 | 0,8 | 0,4 | 0,45 | ||
| башенный | 4К | 0,4 | 0,2 | 0,4 | 0,6 | 0,4 | 0,3 | ||
| портальный | 7К | 0,4 | 0,2 | 0,4 | 0,6 | 0,4 | 0,4 | ||
| мостовой | 4К | 0,4 | 0,2 | 0,25 | 0,25 | 0,6 | |||
| козловой | 5К | 0,4 | 0,22 | 0,4 | 0,9 | 0,4 | 0,55 | ||
| башенный | 4К | 0,4 | 0,3 | 0,25 | 0,5 | 0,25 | 0,4 | ||
| портальный | 7К | 0,4 | 0,3 | 0,4 | 0,6 | 0,4 | 0,5 | ||
| мостовой | 3К | 0,25 | 0,2 | 0,25 | 0,5 | 0,25 | 0,2 | ||
| козловой | 7К | 0,4 | 0,3 | 0,4 | 1,2 | 0,4 | 0,6 | ||
| башенный | 4К | 0,4 | 0,2 | 0,25 | 0,6 | 0,25 | 0,3 | ||
| портальный | 8К | 0,6 | 0,5 | 0,4 | 0,6 | 0,4 | 0,4 | ||
| мостовой | 4К | 0,4 | 0,3 | 0,25 | 0,7 | 0,25 | 0,4 | ||
| козловой | 12,5 | 5К | 0,4 | 0,28 | 0,4 | 0,9 | 0,4 | 0,5 | |
| башенный | 7К | 0,5 | 0,25 | 0,4 | 1,3 | 0,4 | 0,7 | ||
| портальный | 8К | 0,4 | 0,3 | 0,4 | 0,7 | 0,4 | 0,6 | ||
| мостовой | 5К | 0,4 | 0,16 | 0,4 | 1,2 | 0,4 | 0,7 | ||
| козловой | 5К | 0,4 | 0,2 | 0,4 | 0,9 | 0,4 | 0,6 | ||
| башенный | 12,5 | 6К | 0,4 | 0,4 | 0,4 | 0,65 | 0,4 | 0,6 | |
| портальный | 6,3 | 4К | 0,4 | 0,2 | 0,25 | 0,6 | 0,25 | 0,4 | |
| козловой | 5К | 0,4 | 0,2 | 0,4 | 0,8 | 0,4 | 0,5 | ||
| мостовой | 3К | 0,25 | 0,3 | 0,25 | 0,6 | 0,25 | 0,35 | ||
| башенный | 6,3 | 4К | 0,4 | 0,2 | 0,25 | 0,7 | 0,25 | 0,4 | |
| мостовой | 6К | 0,4 | 0,3 | 0,4 | 0,5 | 0,4 | 0,5 | ||
| портальный | 6К | 0,4 | 0,25 | 0,4 | 0,9 | 0,4 | 0,45 | ||
| козловой | 6,3 | 3К | 0,25 | 0,2 | 0,25 | 0,8 | 0,25 | 0,5 | |
| мостовой | 7К | 0,3 | 0,3 | 0,4 | 0,8 | 0,4 | 0,63 | ||
| башенный | 7К | 0,4 | 0,3 | 0,4 | 0,6 | 0,25 | 0,5 | ||
| штабелер | 5К | 0,4 | 0,25 | 0,4 | 0,6 | 0,4 | 0,45 | ||
| портальный | 6К | 0,4 | 0,2 | 0,4 | 0,4 | 0,6 | |||
| козловой | 5К | 0,4 | 0,35 | 0,4 | 0,9 | 0,4 | 0,5 | ||
| мостовой | 7К | 0,3 | 0,3 | 0,4 | 0,5 | 0,4 | 0,58 | ||
| металлург. | 8К | 0,25 | 0,3 | 0,4 | 0,6 | 0,4 | 0,6 | ||
| козловой | 5К | 0,4 | 0,2 | 0,4 | 0,5 | 0,4 | 0,5 | ||
| башенный | 6,3 | 3К | 0,25 | 0,25 | 0,25 | 1,2 | 0,25 | 0,4 | |
| штабелер | 3,2 | 3К | 0,25 | 0,3 | 0,25 | 0,6 | 0,25 | 0,35 | |
| козловой | 12,5 | 5К | 0,3 | 0,35 | 0,4 | 0,6 | 0,4 | 0,55 | |
| мостовой | 5К | 0,4 | 0,4 | 0,4 | 0,7 | 0,4 | 0,6 | ||
| мостовой | 7К | 0,4 | 0,4 | 0,4 | 0,9 | 0,4 | 0,8 | ||
| козловой | 6К | 0,3 | 0,3 | 0,4 | 1,3 | 0,4 | 0,5 | ||
| башенный | 4К | 0,4 | 0,4 | 0,25 | 0,7 | 0,25 | 0,4 | ||
| козловой | 7К | 0,4 | 0.5 | 0,4 | 0.8 | 0,4 | 0.6 | ||
| мостовой | 8К | 0,3 | 0,35 | 0,4 | 0,9 | 0,4 | 0,5 | ||
| козловой | 7К | 0,4 | 0,25 | 0,3 | 0,65 | 0,4 | 0,6 | ||
| мостовой | 3К | 0,25 | 0,2 | 0,25 | 0,6 | 0,25 | 0,35 | ||
| мостовой | 5К | 0,4 | 0,3 | 0,4 | 0,8 | 0,4 | 0,55 |
ОСНОВЫ ЭЛЕКТРОПРИВОДА
Общие сведения об электроприводе
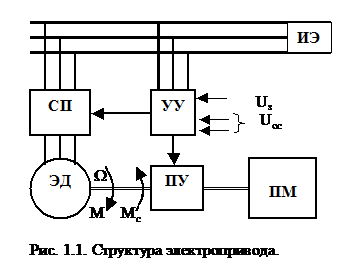 |
При работе производственной машины (ПМ) электродвигатель (ЭД) получает электроэнергию от источника энергии (ИЭ) через силовой преобразователь (СП) и преобразует её в механическую энергию. Силовой преобразователь служит для получения электроэнергии с требуемыми для электродвигателя параметрами и управления потоком этой энергии. Управляет работой электропривода устройство управления (УУ). Для этого на него поступают сигналы задания режима работы электропривода (Uз) и сигналы обратных связей (Uoc) от датчиков, контролирующих работу электропривода. Силовой преобразователь, электродвигатель и устройство управления образует электрическую часть электропривода.
Механическая энергия от электродвигателя передается к исполнительным органам производственной машины через передаточное устройство (ПУ), которое преобразует параметры механического движения (скорость, момент, вид движения). Вращающийся ротор, передаточное устройство и движущиеся части производственной машины (ПМ) составляют механическую часть электропривода. Реальную кинематическую схему обычно заменяют эквивалентной одномассовой схемой относительно электродвигателя.
Работа системы электропривод - производственно-технологическая машина связана с действием различных сил и моментов. Момент М, создаваемый электродвигателем, приводит в движение всю механическую систему. Момент статической нагрузки Mc, образуемый сопротивлением механической системы, трением в узлах передачи движения, противодействует движению электродвигателя.
Основное уравнение движения электропривода, позволяющее описать характер его движения при определенных допущениях, имеет вид:
 , (1.1)
, (1.1)
где J - момент инерции системы, приведённый к валу электродвигателя, кгм2;
Ω- частота вращения двигателя, рад/с.
|
|
|

История развития пистолетов-пулеметов: Предпосылкой для возникновения пистолетов-пулеметов послужила давняя тенденция тяготения винтовок...

Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!