Под идентификацией объектов управления понимают построение в некотором смысле оптимальной математической модели этого объекта по наблюдаемым входным и выходным сигналам. Идентификатор – это устройство, которое по входным и выходным сигналам объекта строит его модель. Идентификатор может представлять собой техническое устройство, либо просто часть программы управляющей ЭВМ.
Структурная схема АС и идентификатором приведена на рис.4.6, 4.7. Первая схема соответствует идентификации объекта, вторая – основного контура системы.
В рассматриваемой схеме блок адаптации  состоит из идентификатора И и вычислительно-исполнительного устройства ВИУ. В настоящее время в адаптивных системах проводится, как правило, только параметрическая идентификация, то есть идентификатор определяет текущие оценки
состоит из идентификатора И и вычислительно-исполнительного устройства ВИУ. В настоящее время в адаптивных системах проводится, как правило, только параметрическая идентификация, то есть идентификатор определяет текущие оценки  параметров математической модели объекта, представленного в виде передаточной функции или уравнений состояния.
параметров математической модели объекта, представленного в виде передаточной функции или уравнений состояния.

Рис. 4.6. Система с идентификацией объекта
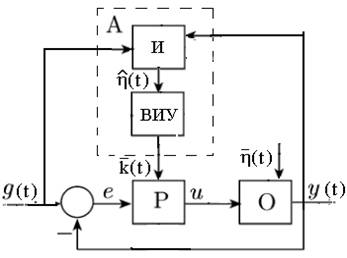
Рис. 4.6. Система с идентификацией основного контура
ВИУ по полученной модели рассчитывает параметры регулятора и осуществляет его настройку. Ведь регулятор в настоящее время это программа в микропроцессоре! Алгоритм работы ВИУ определяется при проектировании обычными методами ТАУ.
В обычных системах процессы идентификации и процесс разработки регулятора разделены во времени – сначала идентификация, затем синтез регулятора. В адаптивной системе процессы идентификации и управления совмещены, а именно, одновременно решаются следующие задачи:
● определение оценок параметров математической модели объекта управления,
● настройка параметров регулятора основного контура,
● управление в основном контуре.
В неадаптивных системах первые две задачи решаются на этапе проектирования системы, поскольку считается, что параметры известны достаточно точно и меняются незначительно.
Методы идентификации, используемые при реализации
Адаптивных регуляторов
Основные частотные методы идентификации, используемые при настройке регуляторов, можно объединить в две группы. В первую входят те, у которых информационная характеристика определяется посредством подачи гармонических сигналов на вход объекта, а с выхода снимаются гармонические сигналы той же частоты, но отличные по амплитуде и фазе.
Достоинством методов данной подгруппы является их наглядность. К недостаткам можно отнести длительность настройки, сложность оборудования для формирования синусоидальных сигналов, а также неточность этих сигналов, что является дополнительным источником погрешности при идентификации.
Методы второй группы позволяют получать частотные характеристики по временным динамическим характеристикам – переходной или импульсной переходной функции объекта управления. Существенной положительной чертой методов второй подгруппы является малое время проведения эксперимента, сравнимое с длительностью переходного процесса исследуемого объекта. При этом используется разложение временной динамической характеристики в ряд Фурье, которое осуществляется либо программным способом, т. е. когда характеристика обрабатывается вычислительными средствами, либо аппаратным способом, когда на выходе объекта ставят специальные фильтры. Последние выделяют гармоники, используемые для построения частотных характеристик объекта. Однако выделение гармоник сопровождается появлением ошибок за счет конечного верхнего предела интегрирования, что так же, как и в первом случае, ведет к ухудшению результатов идентификации.
В этой связи представляется целесообразным использовать ВИМ, который хорошо согласуется с особенностями представления информации в вычислительных средствах, не требует выполнения трудоемкой операции перехода к функциям вещественного переменного. В самом деле, на основе ВИМ математическая модель объекта найдется по экспериментальной импульсной или переходной характеристике с помощью выражений
Пусть на вход объекта подан единичный ступенчатый сигнал  и известна переходная функция
и известна переходная функция  объекта. В этом случае можно записать вещественную ПФ в виде
объекта. В этом случае можно записать вещественную ПФ в виде  , где
, где  – изображение переходной функции
– изображение переходной функции  ;
;  – изображение единичного ступенчатого сигнала
– изображение единичного ступенчатого сигнала  .
.
Тогда формула связи переходной характеристики с искомой пере-
даточной функцией  имеет вид
имеет вид

На основе этого выражения найдется ЧХ  , элементы которой определяются формулой (2.18):
, элементы которой определяются формулой (2.18):
 ,
, 
Полученные здесь значения численной характеристики являются числами.
Второй этап решения задачи идентификации связан с получением коэффициентов передаточной функции вида (1.5) по найденной ЧХ. Для его выполнения составим систему линейных алгебраических уравнений вида
 .
.
Решив полученную систему линейных алгебраических уравнений, получим коэффициенты передаточной функции объекта, т.е. решим задачу идентификации.
СНС с настраиваемой моделью
Конкретной формой реализации принципа адаптации с идентификатором является метод настраиваемой модели. Функциональная схема системы, где адаптация осуществляется методом настраиваемой модели, представлена на рис. 4.7.
Идентификатор включает настраиваемую модель (объекта!) НМ и блок настройки параметров модели НМ. На вход НМ подается входная величина реального объекта управления – управляющее воздействие  . Выходные сигналы настраиваемой модели и объекта сравниваются. Наличие сигнала ошибки говорит о том, что параметры объекта и НМ не совпадают. Блок БНМ настраивает параметры модели так, чтобы устранить рассогласование. Подстройка производится до тех пор, пока рассогласование не станет равным нулю. Тем самым, параметры модели будут следить за параметрами объекта.
. Выходные сигналы настраиваемой модели и объекта сравниваются. Наличие сигнала ошибки говорит о том, что параметры объекта и НМ не совпадают. Блок БНМ настраивает параметры модели так, чтобы устранить рассогласование. Подстройка производится до тех пор, пока рассогласование не станет равным нулю. Тем самым, параметры модели будут следить за параметрами объекта.
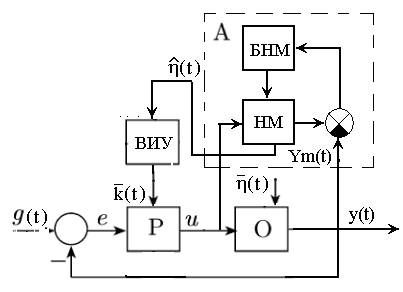
Рис. 4.7. Блок схема адаптивной системы с настраиваемой моделью
В ВИУ оперативно решается задача синтеза системы с известными параметрами. Для этого могут применяться любые известные методы.
Оценка модели может осуществляться как путем пассивного наблюдения без нарушения нормальной работы объекта (используя известные командные сигналы), либо путем активного эксперимента, когда на объект или систему подаются специальные идентифицирующие сигналы (ступенчатое, синусоидальное, случайное и тп.).
Для оценки модели активный эксперимент может строиться на возбуждении дополнительных процессов посредством следующих воздействий:
● Координатных;
● Параметрических – изменением параметров регулятора;
● Алгоритмических (нелинейных) – включением в СУ нелинейных элементов;
● Структурных – образованием новых контуров.
В случае с активным экспериментом системы с идентификатором близки к поисковым системам. Отличие состоит в следующем:
● Извлекается информация не о значении поискового критерия, а о параметрах математической модели;
● Знание модели позволяет построить целенаправленную, а не поисковую процедуру изменения параметров вплоть до получения оптимальных результатов за один шаг. Поэтому эти системы являются более быстродействующими.
Однако есть и недостатки, основной из которых – в них не контролируется непосредственно критерий оптимального функционирования.
Кроме того, при использовании систем с идентификатором возникают следующие проблемы:
● Трудно заранее указать приемлемую погрешность настройки регулятора для гарантированного достижения цели настройки при окончании итерационной процедуры.
● Для повышения точности оценки модели требуется дополнительное время, что снижает выгоды от получения оценки – вплоть до потери эффекта адаптации.
● Методы расчета параметров достаточно трудоемкие, поэтому алгоритмы работы ВИУ оказываются сложными. Их многократное применение в реальном времени по мере поступления дополнительной информации о параметрах объекта требует больших затрат.






