

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...
Топ:
Установка замедленного коксования: Чем выше температура и ниже давление, тем место разрыва углеродной цепи всё больше смещается к её концу и значительно возрастает...
Методика измерений сопротивления растеканию тока анодного заземления: Анодный заземлитель (анод) – проводник, погруженный в электролитическую среду (грунт, раствор электролита) и подключенный к положительному...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Интересное:
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Как мы говорим и как мы слушаем: общение можно сравнить с огромным зонтиком, под которым скрыто все...
Уполаживание и террасирование склонов: Если глубина оврага более 5 м необходимо устройство берм. Варианты использования оврагов для градостроительных целей...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Задачей автоматического управления рассмотренными объектами является поиск и поддержание таких значений входных воздействий объекта, которые обеспечивают экстремальное значение выходной величины независимо от действия возмущений.
Системы решающие эту задачу называются системами экстремального регулирования (ЭР).
Главная информация при построении экстремальных систем состоит в том, что объект имеет экстремальную характеристику. При этом часто не известны ни аналитическое описание характеристики, ни характер ее изменений при действии возмущений (координатных и параметрических), которые вызывают ее дрейф.
Решения задачи ЭР зависят от характера дрейфа статической характеристики. Причинами дрейфа являются изменения неконтролируемых параметров. Например, движение цели в случае с РЛС, или изменение влажности топлива в случае котельного агрегата. Возможны следующие варианты.
1) Статическая характеристика дрейфует вдоль оси ординат.
Рис. 2.6 Дрейф экстремальной характеристики по вертикали
В данном случае нет необходимости применять экстремальную систему. Значение можно определить заранее и поддерживать системой стабилизации. (Комбинированный контур, котельный агрегат)
2) Статическая характеристика объекта дрейфует по заранее известному закону (рис.2.7).
В данном случае проще получить зависимость  и реализовать систему программного регулирования. Примером подобной система является система спутниковой связи. Положение спутника связи точно известно в каждый момент времени и слежение за максимумом сигнала проще реализовать как отслеживание положение спутника.
и реализовать систему программного регулирования. Примером подобной система является система спутниковой связи. Положение спутника связи точно известно в каждый момент времени и слежение за максимумом сигнала проще реализовать как отслеживание положение спутника.
Рис.2.7 Дрейф экстремальной характеристики по известному закону
|
|
3) Статистическая характеристика дрейфует по неизвестному закону.
Именно этот случай (рис. 2.8) требует разработки специальных методов реализации поискового режима.
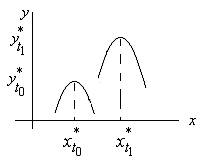
Рис. 2.8 Произвольный дрейф экстремальной характеристики
Целесообразность применения ЭС
ЭС целесообразно применять
● если существует показатель качества, имеющий естественный или искусственный экстремум, с изменением которого происходит существенное изменение технико-экономической эффективности всей системы;
● если существует возможность определения экстремума функционала качества и формирования управляющего воздействия с целью получения экстремального режима работы;
● когда выгоды от увеличения технико-экономической эффективности существенно компенсируют затраты, связанные с реализацией экстремального управления.
Принцип действия ЭС
Как уже отмечалось, в зависимости от количества координат, характеризующих экстремальный статический режим объекта управления, ЭС делят на одномерные и многомерные. Начнем с одномерной ЭС, обобщенная структура которой представлена на рис. 2.9. В основном, ЭС содержит те же обязательные функциональные элементы, что и любая САР.

Рис. 2.9 Структура экстремальной системы
В частности, на рис. 2.9:
ИУ – исполнительное устройство,
УПУ – усилительно-преобразовательное устройство,
ИОЭ – измеритель отклонения от экстремума.
Основной интерес представляет ИОЭ.
Пусть исходное расположение статистической характеристики объекта задано кривой 1 на рис. 2.10, которая имеет максимальное значение  при
при  . Пусть далее произошло смещение характеристики по оси
. Пусть далее произошло смещение характеристики по оси  и значение
и значение  упало с до
упало с до  .
.
При этом ясно, что измеряя только и нельзя определить направление смещения.
А вот если бы мы знали еще и скорость  , то проблема была бы решена.
, то проблема была бы решена.

Рис.2.10 Рис.2.11
Из рисунка 2.11 следует, что закон экстремального управления должен удовлетворять условию
|
|
при поиске максимума.
Таким образом, чтобы принять решение о том, куда двигаться, нужно менять и определять  .
.
Отсюда следует правило: чтобы определить направление движения к экстремуму необходимо изменить входную величину и проанализировать реакцию на это изменение.
В отличие от обычных САР управление в ЭС носит дуальный характер, т.е. служит и для определения направления движения и для осуществления самого движения к экстремуму. Поэтому его часто делят на два вида – пробное и рабочее. Эти движения связаны между собой по- разному. Можно выделить три случая.
1) Пробное и рабочее движения разделены.
2) Пробное и рабочее движения совпадают.
3) Пробное и рабочее движение существуют одновременно.
Типы экстремальных систем
|
|
|

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...

История развития хранилищ для нефти: Первые склады нефти появились в XVII веке. Они представляли собой землянные ямы-амбара глубиной 4…5 м...

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!