

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...
Топ:
Методика измерений сопротивления растеканию тока анодного заземления: Анодный заземлитель (анод) – проводник, погруженный в электролитическую среду (грунт, раствор электролита) и подключенный к положительному...
Проблема типологии научных революций: Глобальные научные революции и типы научной рациональности...
Интересное:
Аура как энергетическое поле: многослойную ауру человека можно представить себе подобным...
Что нужно делать при лейкемии: Прежде всего, необходимо выяснить, не страдаете ли вы каким-либо душевным недугом...
Влияние предпринимательской среды на эффективное функционирование предприятия: Предпринимательская среда – это совокупность внешних и внутренних факторов, оказывающих влияние на функционирование фирмы...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Для плоской системы параллельных сил можно составить два уравнения равновесия. Если силы параллельны оси у, то можно составить две формы уравнений равновесия.
Первая форма уравнений равновесия
1.  .
.
2.  .
.
Второе уравнение можно составить относительно любой точки.
Вторая форма уравнений равновесия
1.  .
.
2.  .
.
Задача 11. Определить реакции опор, если Р = 6 кН, q = 1 кН / м, М = 4 кНм (рис. 4.8).
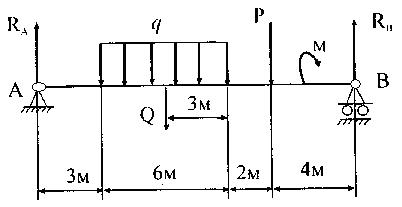
Рис. 4.8
Решение. Рассмотрим равновесие балки АВ под действием силы  , момента
, момента  , равномерно распределенной нагрузки интенсивности q и реакций связей
, равномерно распределенной нагрузки интенсивности q и реакций связей  . Составим два уравнения равновесия по первой форме. Равномерно распределенную нагрузку заменим равнодействующей
. Составим два уравнения равновесия по первой форме. Равномерно распределенную нагрузку заменим равнодействующей  кН, которая приложена к середине нагруженного участка:
кН, которая приложена к середине нагруженного участка:
1.  .
.
2.  .
.
Находим из (2)
 ,
,
из (1)
 .
.
Ответ.  .
.
Задача 12. На двухконсольную балку (рис. 2.2.1, а) с шарнирно-неподвижной опорой в точке А и шарнирно-подвижной в точке В действуют сосредоточенная сила F = 10 кH,пара сил с М = 4 0 кH/м и равномерно распределенная нагрузка интенсивностью q = 0,8 кН/м. Определить реакции опор.
Решение. Составление расчетной схемы (рис. 2.2.1, б). Объект равновесия - балка СD. Активные силы F и  , которая приложена в точке О посередине участка АD, образуют плоскую параллельную систему сил.
, которая приложена в точке О посередине участка АD, образуют плоскую параллельную систему сил.
После освобождения балки от связей и замены их реакциями RA, RB получаем уравновешенную систему, состоящую из четырех параллельных сил и одной пары сил (момента). Ось х направляем вдоль оси балки, ось у - вертикально вверх из точки С.
2. Условия равновесия:
 .
.

Рис. 2.2.1
3. Составление уравнений равновесия
 ;
;
 .
.
4. Определение искомых величин, проверка правильности решения и анализ полученных результатов. Уравнения равновесия содержат две неизвестных величины, задача статически определима, но каждое из уравнений содержит обе реакции. Поэтому из первого уравнения, как более простого, выразим RA через неизвестную RB и подставим ее значение во второе уравнение:
|
|
 ;
;
 ;
;
 ;
;  ;
;
 .
.
Для проверки правильности решения составим любое уравнение равновесия, не использованное ранее для определения неизвестных, например, запишем уравнение моментов относительно точки А:

т.е. уравнение удовлетворяется тождественно, что подтверждает правильность решения – реакции определены верно и их направления соответствуют показанным на расчетной схеме.
Лекция 5
ФЕРМЫ И составные конструкции
КЛАССИФИКАЦИЯ ФЕРМ
Фермой называется конструкция, составленная из стержней, концы которых соединены между собой шарнирами так, что стержни не могут иметь относительных перемещений, т.е. вся конструкция представляет собой неизменяемую систему. Другими словами, фермой называется геометрически неизменяемая шарнирно-стержневая конструкция (рис. 5.1). Места соединения стержней называются узлами ферм, а те узлы, которыми ферма опирается на основание, называются опорными узлами (рис. 5.2, 5.3, 5.4).
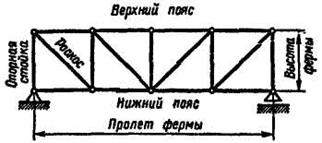

Рис. 5.1 Рис. 5.2


Рис. 5.3 Рис. 5.4
Стержни плоской фермы, расположенные по верхнему контуру, образуют верхний пояс, а расположенные по нижнему контуру - нижний пояс фермы. Вертикальные стержни называются стойками, а наклонные - раскосами.
Фермы часто употребляются в различных сооружениях, например, при стройке мостов, стропил, грузоподъемных машин. При этих условиях допускают простой, элементарный расчет, не говоря уже о значительной экономии материалов. Расчет фермы становится более простым, если под действием внешних сил стержни фермы подвергаются только продольным усилиям, т.е. растяжению или сжатию. Для этого должны иметь место следующие условия:
стержни ферм должны быть прямолинейны и соединены своими концами шарнирами без трения;
|
|
силы должны быть приложены в узлах ферм.
На практике эти условия, как идеальные, осуществляются не вполне, а с возможным приближением.
Если оси стержней фермы лежат в одной плоскости, то ферма называется плоской, в противном случае - пространственной.
Рассмотрим плоские фермы.
Найдем наименьшее число стержней, необходимых для построения фермы, образованной из треугольников и имеющий n узлов (рис. 5.1, а).
Чтобы связать первые три узла, необходимо три стержня; для жесткого присоединения каждого из остальных (n- 3) узлов нужно по два стержня. Следовательно, для того чтобы ферма обладала жесткостью (т.е. чтобы стержни не могли иметь относительных перемещений), необходимо, чтобы число стержней было:
 . (5.1)
. (5.1)
Если число стержней
 ,
,
то конструкция не будет обладать жесткостью, т.е. она не будет фермой. Если же
 ,
,
то ферма будет иметь «лишние» стержни.
Равенство (5.1) называется условием жесткости. Если ферма обладает жесткостью, то ее можно рассматривать как абсолютно твердое тело, находящееся под действием активных сил и реакций связей. Будем предполагать, что эти силы приложены в узлах ферм и, если ферма плоская, действуют в плоскости ферм.
При равновесии такая система сил должна удовлетворять трем уравнениям равновесия. На каждый узел фермы будет действовать плоская система сходящихся сил, состоящая из внешних сил, действующих на ферму, и внутренних - усилий в самих стержнях, которые будут, согласно сделанным допущениям, иметь направления стержней. Поэтому система сил, действующих на каждый узел, должна удовлетворять двум уравнениям равновесия.
Таким образом, все действующие на ферму внешние силы (активные и реакции) и усилия в стержнях фермах должны удовлетворять 2 n уравнениям, где n - число узлов. В число этих 2 n уравнений будут входить три уравнения, выражающие условия равновесия внешних сил, поэтому для определения усилий в стержнях фермы остаются (2 n -3) уравнений.
Если число стержней фермы N= 2 n- 3, то эти усилия могут быть определены из уравнений статики и, следовательно, ферма будет статически определимой.
Если же N> (2 n -3), то усилия в стержнях посредством одних только уравнений статики абсолютно твердого тела определить нельзя и ферма будет статически неопределимой.
|
|
Следовательно, условие жесткости (5.1) является и условием статической определенности.
Способ вырезания узлов
Рассмотрим определение усилий в стержнях фермы по способу вырезания узлов. Этот способ состоит в том, что мысленно вырезают узлы фермы, прикладывают к ним соответствующие внешние силы и реакции стержней и составляют уравнения равновесия сил, приложенных к каждому узлу. Так как в начале расчета фермы неизвестно, какие стержни фермы растянуты и какие сжаты, то условно предполагают, что все стержни растянуты (реакции стержней направлены от узлов).
Если в результате вычислений получают ответ со знаком минус, то соответствующий стержень сжат. Найденные реакции стержней равны по модулю внутренним усилиям в стержнях.
Последовательность рассмотрения узлов определяется обычно условием, что число неизвестных сил, приложенных к узлу, не должно превышать числа уравнений равновесия сил (двух для плоской фермы и трех для пространственной). Тогда эти неизвестные определяются сразу из уравнений равновесия сил, действующих на этот узел.
Если ферма плоская, то можно проверить правильность вычислений, построив многоугольники сил, приложенных к ее узлам. Эти многоугольники должны быть замкнутыми.
Усилия в отдельных стержнях загруженной фермы могут оказаться равными нулю. Такие стержни принято называть нулевыми. Рассмотрим леммы, пользуясь которыми можно определить нулевые стержни плоской фермы, не производя ее расчета.
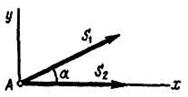


Рис. 5.5 Рис. 5.6 Рис. 5.7
Л е м м а 1. Если в незагруженном узле плоской фермы сходятся два стержня, то усилия в этих стержнях равны нулю (рис. 5.5):

Л е м м а 2. Если в незагруженном узле плоской фермы сходятся три стержня, из которых два расположены на одной прямой, то усилие в третьем стержне равно нулю. Усилия в первых двух стержнях равны между собой (рис. 5.6):

Л е м м а 3. Если в узле плоской фермы сходятся два стержня и к узлу приложена внешняя сила, линия действия которой совпадает с осью одного из стержней, то усилие в этом стержне равно по модулю приложенной силе, а усилие в другом стержне равно нулю (рис. 5.7):
|
|

Основываясь на результатах расчета, можно установить следующее:
1. Если в незагруженном узле фермы сходятся три стержня, не лежащих в одной плоскости, то усилия в каждом из этих стержней равны нулю.
2. Если в некотором узле фермы все внешние силы и все стержни, кроме одного, лежат в одной плоскости, то усилие в стержне, не лежащем в этой плоскости, равно нулю.
Эти соображения, дающие возможность без вычислений определить стержни с нулевыми усилиями, значительно упрощают определение усилий в стержнях пространственных ферм.
Задача 1. Определить опорные реакции и усилия в стержнях фермы, если  = 20 Н,
= 20 Н,  = 40 Н,
= 40 Н,  = 30°, а = 4 м (рис. 5.8).
= 30°, а = 4 м (рис. 5.8).
Решение. Рассмотрим равновесие фермы, считая ее абсолютно твердым телом. Отбросим связи и заменим их реакциями связей.
На опоре А имеются две составляющие  и
и  , на опоре В — одна составляющая
, на опоре В — одна составляющая  . Для полученной уравновешенной плоской произвольной системы сил составим три уравнения равновесия и найдем реакции связей:
. Для полученной уравновешенной плоской произвольной системы сил составим три уравнения равновесия и найдем реакции связей:
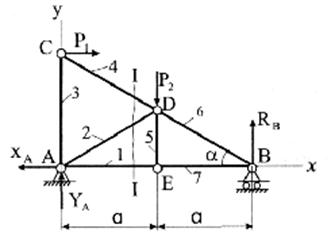
Рис. 5.8
 . (5.1)
. (5.1)
 . (5.2)
. (5.2)
 . (5.3)
. (5.3)
Находим из (5.1)
 ,
,
из (5.3)
 .
.
из (5.2)
 .
.
Определение усилий в стержнях начинаем с узла В (рис. 5.9), где число неизвестных равно двум. Составим для узла В два уравнения равновесия в проекции на оси х и у. Направление осей показано на рис. 5.8.
 . (5.4)
. (5.4)
 . (5.5)
. (5.5)
Находим из (5.5)
 ,
,
из (5.4)


Рис. 5.9
.
Рассмотрим узел Е (рис. 5.10). Составим два уравнения равновесия, учитывая, что  :
:
 . (5.6)
. (5.6)
 . (5.7)
. (5.7)
Находим из (5.6)
 .
.

Рис. 5.10
Рассмотрим узел С (рис. 5.11). Составим два уравнения равновесия:
 . (5.8)
. (5.8)
 . (5.9)
. (5.9)
Находим из (5.8)
 ,
,
из (5.9)
 .
.

Рис. 5.11
Рассмотрим узел А (рис. 5.12). Составим одно уравнение равновесия, учитывая, что  .
.
 . (5.10)
. (5.10)

Рис. 5.12
Находим
 .
.
Таблица 5.1
Результаты вычислений
| Параметр | Номер стержня | ||||||
| Знак усилия Усилие, Н | + 54.65 | - | + 11.55 | - 23.1 | - 63.1 | + 54.65 |
Минус показывает, что стержни 2, 4, 6 сжаты, а не растянуты, как предполагалось.
3 Способ сечений (Риттера)
Так же какпри способе вырезания узлов необходимо сначала определить реакции опор и проверить статическую определенность фермы. Ферма рассекается на две части таким образом, чтобы в сечении было не более трех стержней с неизвестными усилиями, при этом каждая из отсеченных частей должна содержать не менее 2-х узлов. К рассмотрению принимается любая из частей фермы. Действие отброшенной части на оставшуюся часть изображается усилиями в рассеченных стержнях, направленными в сторону отброшенной части.
Оставшаяся часть находится в равновесии под действием плоской произвольной системы сил, поэтому составляются три уравнения равновесия, как правило, используется либо вторая, либо третья формы уравнений равновесий сил. Усилия определяются независимым образом. Моменты целесообразно брать относительно точки (точки Риттера), полученной на пересечении линий действия двух усилий. Если ферма имеет параллельные пояса. То усилия в стойках и раскосах определяются путем проецирования на ось, перпендикулярную параллельным усилиям.
|
|
Задача 2. Для фермы примера 5.8 найти усилия в стержнях 1, 2, 4.
Решение. Произведем сечение через стержни (1, 2, 4) и рассмотрим равновесие сечения I—I, лежащего слева (рис. 5.13). Составим уравнение моментов относительно точки D.
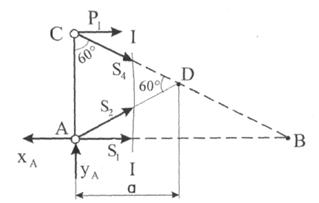
Рис. 5.13
 .
.
Находим
 .
.
Составим уравнения моментов относительно точки А

 .
.
Для определения  рассмотрим равновесие сечения I—I, лежащего справа (рис. 5.14).
рассмотрим равновесие сечения I—I, лежащего справа (рис. 5.14).
Составим уравнение моментов относительно точки В
 ,
,
где
 ,
,
 .
.

Рис. 5.14
Результаты, полученные способами вырезания узлов и Риттера совпадают.
|
|
|

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...

История развития пистолетов-пулеметов: Предпосылкой для возникновения пистолетов-пулеметов послужила давняя тенденция тяготения винтовок...

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...

Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!