Для пространственной системы параллельных сил можно составить три уравнения равновесия. Если силы параллельны оси Z, то имеем следующие уравнения равновесия:
1.  .
.
2.  .
.
3.  .
.
Задача 2. Квадратная однородная плита весом Р находится в равновесии. Определить реакции связей, если Р = 100 Н; F = 20 H (рис. 4.6).
Решение. Рассмотрим равновесие плиты под действием системы параллельных сил  ,
,  и реакций связей
и реакций связей  ,
,  ,
,  . Составим три уравнения равновесия:
. Составим три уравнения равновесия:
1. 
2. 
3. 
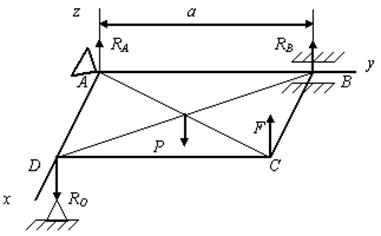
Рис. 4.6
Находим из (2)
 ,
,
из (3)
 ,
,
из (1)
 .
.
Ответ.  .
.
Минус показывает, что реакция связей направлена противоположно направлению, показанному на рис. 4.6.
Задача 3. При повреждении одной из двух петель прямоугольной парниковой рамы ABDE ее удерживают в горизонтальном положении двумя вертикальными стержнями FJ и KL. Вес рамы G = 80 Н. Расстояния: BF =1/4 BD; ND =1/5 BD; KN =1/2 ED. Определить реакцию шарового шарнира (петли) А и усилия в стержнях FJ и KL (pиc. 5.2.1).
Решение. Рассматриваем равновесие сил, приложенных к раме. Прикладываем к раме в центре тяжести С задаваемую силу - вес рамы  (рис. 5.2.1). Отбрасывая связи, прикладываем к раме их реакции. Реакции сжатых стержней
(рис. 5.2.1). Отбрасывая связи, прикладываем к раме их реакции. Реакции сжатых стержней  и
и  , равные усилиям в стержнях, направляем вертикально вверх. Реакция шарового шарнира
, равные усилиям в стержнях, направляем вертикально вверх. Реакция шарового шарнира  может иметь любое направление, но при условии, что остальные силы , и , приложенные к раме, вертикальны, реакция тоже имеет вертикальное направление.
может иметь любое направление, но при условии, что остальные силы , и , приложенные к раме, вертикальны, реакция тоже имеет вертикальное направление.
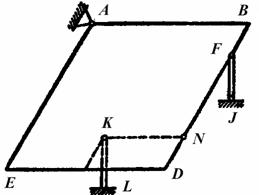
Рис. 5.2.1 Рис. 5.2.2
Для полученной системы вертикальных сил, из которых три силынеизвестны, составляем три уравнения равновесия параллельных сил в пространстве. Начало координат помешаем в одну из опорных точек (A),ось z направляем параллельно силам,оси х и у проводим по краям рамы.
Уравнения равновесия параллельных сил имеют следующий вид:
 (1)
(1)
 (2)
(2)
 (3)
(3)
В уравнение (2) подставляем BN =4/5 BD, BF =1/4 BD и, сокращая, получаем
 ; (1а)
; (1а)
 ; (2а)
; (2а)
 . (3а)
. (3а)
Подставляем значение G =180 H, решая систему двух первых уравнений и находим RK и RF:
 ,
,
или
 .
.
Вычитая из одного уравнения другое, находим:
 .
.
Из уравнения (3) определяем RA:
 .
.
Задача 4. Дано: Р =5 кН, М =6 кНм, l =0,8 м, F 3=8 кН, F 1=4 кН. Найти: реакции связей А, В и стержня (рис. 5.2.2).
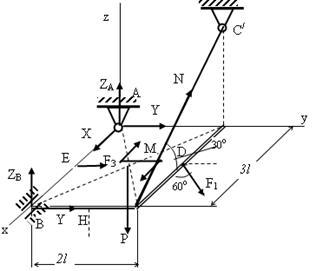
Рис. 5.2.2
Решение. Рассмотрим равновесие плиты. На нее действуют сила тяжести  , силы
, силы  , пара сил с моментом
, пара сил с моментом  и реакции связей А (
и реакции связей А ( ), В (
), В ( ) и стержня
) и стержня  (считаем его растянутым).
(считаем его растянутым).
Составляем уравнения равновесия пространственной системы сил:

 ,
,  ;
;
 ,
,
 ;
;



 ,
,
 ;
;

 ,
,  ;
;

 ,
,
 .
.
| XA
| YA
| ZA
| YB
| ZB
| N
|
| кН
|
| 2,33
| –6,7
| –1
| –4,8
|
|
|
Задача 5.. Горизонтальный вал весом G = 15 Н может вращаться в цилиндрических шарнирах А и В (рис. 5.2.4). К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F = 0,1 N.
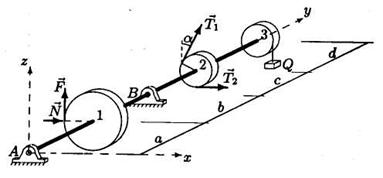
Рис. 5.2.4
На шкив 2 действуют силы натяжения ремней Тг = 30 Н, Т 2 = 57 Н. Груз Q = 18 Н висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала. Учесть веса шкивов: Рг = 35 Н, Р 2 = 10 Н, Р 3 = 15 Н. Все нагрузки действуют в вертикальных плоскостях. Известны радиусы шкивов, R 1= 26 см, R 2 = 10 см, R 3 = 11 см и расстояния между характерными точками вала: а = 22 см, b = 25 см, с = 26 см, d = 26 см. Общая длина вала L = a + b + c + d; α =30°.
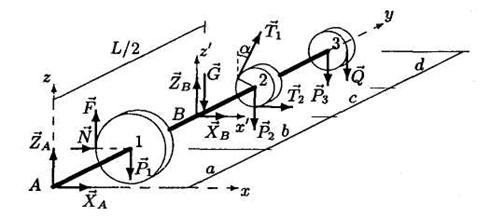
Рис. 5.2.5
Решение
1. Действие цилиндрических опор А и В заменим реакциями ZA, ХА и ZB, ХВ (рис. 5.2.5). Вес вала G приложим в центре. Вес груза изобразим вектором Q.
2. Для определения силы давления составляем уравнение моментов
относительно оси вала:
 .
.
Уравнение содержит одну неизвестную F. Линии действия остальных сил пересекают ось у и их моменты относительно оси вала равны нулю.
Из полученного уравнения находим

По условию N = F /0,1 = 27,692 Н.
3. Определяем вертикальные реакции шарнирных опор вала. Для
этого составляем два уравнения моментов относительно горизонтальных осей, проходящих через шарниры А и В. Рассматриваем для удобства проекцию всех сил на плоскость zy (рис. 5.2.6). Таким образом вычисление моментов относительно осей сводим к плоской задаче вычисления моментов относительно точек А и В.
Знаки моментов сил определяем как в задачах плоской статики: момент силы, вращающей тело вокруг моментной точки против часовой стрелки считается положительным, по часовой стрелке — отрицательным. Моменты сил, перпендикулярных плоскости zy (и поэтому не изображенных на рис. 5.2.9), относительно любой ее точки равны нулю.
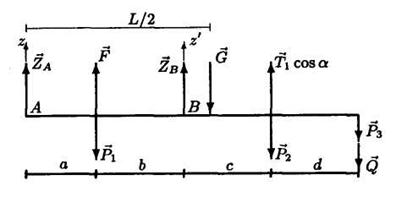
Рис. 5.2.6
Решая уравнения


находим ZA = –11,324 H, ZB = 75,574 H.
4. Проверяем правильность нахождения вертикальных реакций,
составляя уравнение равновесия в проекции на ось z (рис. 5.2.6):

5. Определяем горизонтальные реакции опор вала. Для этого составляем два уравнения моментов относительно осей, совпадающих с
линиями действия вертикальных реакций шарниров. Рассматриваем
горизонтальную проекцию силовой схемы (рис. 5.2.7):


Решая уравнения, находим ХА = 25,100 Н, ХВ = –124,792 Н.
6. Проверяем правильность нахождения горизонтальных реакций,
составляя уравнение равновесия в проекции на ось х вдоль линии действия горизонтальных реакций:

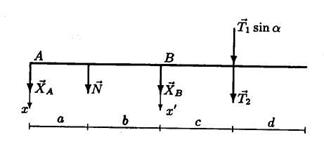
Рис. 5.2.7
Результаты расчетов в Н заносим в таблицу:
| N
| XA
| ZA
| XB
| ZB
|
| 27,692
| 25,100
| -11,324
| -124,792
| 75,574
|
Задача 6. Груз весом Р поднимается с помощью лебедки (рис. 5.2.8). К концу рукоятки лебедки приложена вертикальная сила Q. Длина рукоятки l. Расстояние КМ = а, СЕ =d, радиус малойшестерни равен r, радиус большой — R, радиус барабана — R 1, АВ=L 1. Рукоятка лебедки расположена горизонтально. Плоскость, перпендикулярная осям валов и проходящая через подшипники А и С, отстоит от плоскости зубчатых колес на расстоянии l 1. CD = 2 l 1. Угол зацепления (угол между усилием в зубчатом зацеплении и нормалью к колесам в точке касания) принять равным 33° (рис. 5.2.9, 5.2.10).
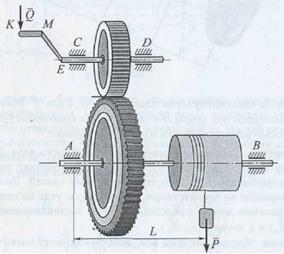
Рис. 5.2.8
Определить величину силы Q и реакции всех подшипников.
Решение. Рассмотрим равновесие вала CD (рис. 5.2.9) и вала АВ (рис. 5.2.10).
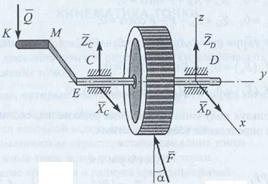
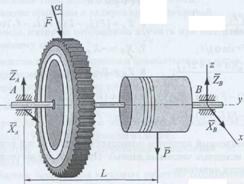
Рис. 5.2.9 Рис. 5.2.10
Уравнения равновесия вала CD:





Уравнения равновесия вала АВ:





Используя полученные уравнения равновесия, определяем неизвестные.





Задача 7. Коленчатый вал может вращаться в цилиндрических подшипниках А и В. На конце вала насажана шестерня радиусом R. В центре D шейки приложена сила Q, лежащая в плоскости перпендикулярной оси вала и направленная параллельно оси z. Определить модуль силы F, возникающей в зубчатом зацеплении, и реакции коренных подшипников в точках А и В. На рис. 5.2.11: Ау — ось вала, ось Ах перпендикулярна оси вала и параллельна общему перпендикуляру, соединяющему ось вала с осью шатунной шейки.
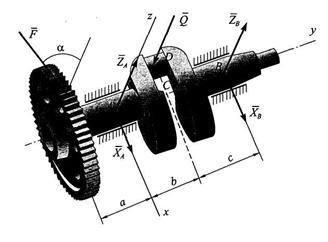
Рис. 5.2.11
Ось Az перпендикулярна плоскости Аху. Сила F лежит в плоскости шестерни под углом α к оси z. Длина кривошипа (расстояние между осью шатунной шейки и осью вала) равна r.
Решение. Рассмотрим равновесие коленчатого вала. Применив принцип освобождаемости от связей, отбросим цилиндрические шарниры А и В и заменим их действие реакциями связей. Цилиндрические шарниры не препятствуют перемещению тела по оси у, поэтому их реакции можно представить двумя составляющими в точке A (YA, ZA) и в точке B (YB, ZB).
Таким образом, система сил, действующих на коленчатый вал (YA, ZA, YB, ZB, F, Q), эквивалентна нулю. В этой системе пять неизвестных, то есть задача статически определена.
Составим уравнения равновесия.




Используя полученную систему уравнений, составляем алгоритм для определения реакций связей:








