ПРОЦЕДУРА ПОСЛЕДОВАТЕЛЬНОЙ D-ОПТИМАЛЬНОЙ ИДЕНТИФИКАЦИИ (ДППИ).
Зададим линейно-комбинационную модель следующим образом:

Задача сводится к нахождению вектора  , а точнее его оптимального значения и его ковариационной матрицы.
, а точнее его оптимального значения и его ковариационной матрицы.
Поскольку модель нелинейно-параметризованная, будем опираться на теорию последовательного планирования эксперимента, а именно на D-оптимальную процедуру последовательной идентификации (ДППИ).
D-оптимальная процедура последовательной идентификации может быть сформулирована следующим образом: объект исследования возбуждается в момент времени  путем подачи на его вход некоторого "затравочного" тестирующего сигнала протяженностью
путем подачи на его вход некоторого "затравочного" тестирующего сигнала протяженностью  . Затравочный тестирующий сигнал должен обеспечивать возможность оценивания элементов вектора
. Затравочный тестирующий сигнал должен обеспечивать возможность оценивания элементов вектора  , причем при оценке опираемся на теорию нелинейного оценивания статических моделей.
, причем при оценке опираемся на теорию нелинейного оценивания статических моделей.
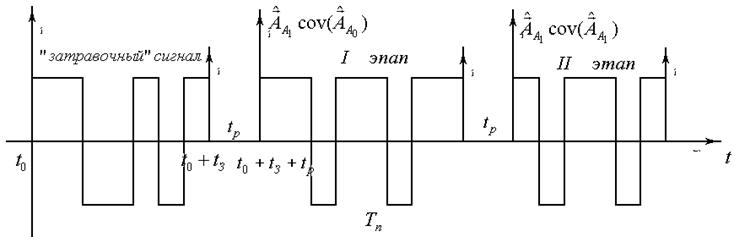
Начиная с момента времени ( ) в течение времени
) в течение времени  вычисляются оценки элементов вектора и синтезируется первичный участок локального D-оптимального тестирующего сигнала. С момента времени
вычисляются оценки элементов вектора и синтезируется первичный участок локального D-оптимального тестирующего сигнала. С момента времени  . Протяженность участка после
. Протяженность участка после  будет либо равна
будет либо равна  , если производится планирование одного измерения, либо больше , если производится планирование более одного измерения.
, если производится планирование одного измерения, либо больше , если производится планирование более одного измерения.
После окончания реализации первого участка сигнала и проведения всех запланированных измерений выхода необходимо уточнить НМНК оценки вектора  и синтезировать второй участок локального D-оптимального плана, проверив перед этим правило останова ДППИ. Уточнение производится с учетом всех ранее произведенных измерений выхода, включая измерения этапа затравочного тестирования.
и синтезировать второй участок локального D-оптимального плана, проверив перед этим правило останова ДППИ. Уточнение производится с учетом всех ранее произведенных измерений выхода, включая измерения этапа затравочного тестирования.
После синтеза второго участка сигнала он подается на вход объекта, и процедура повторяется вплоть до выполнения правила останова. Правило останова ДППИ то же, что и для моделей статики. Таким образом, в процессе реализации в реальном времени осуществляется синтез участков локального D-оптимального тестирующего сигнала и поэтапное уточнение НМНК оценок параметров модели. По окончании ДППИ получается близкая к D-оптимальной нелинейно-параметризованная динамическая регрессионная модель.
В результате эксперимента имеем неоптимальные участки (). Для обеспечения непрерывности сигнала необходимо заполнить эти неоптимальные интервалы длительностью каждый. Возможно несколько подходов.
I подход применим, если время расчета меньше шага дискретизации ( )., Тогда, если симметричные участки локального D-оптимального тестирующего сигнала эквивалентны, то на вход объектов в течение интервалов можно подавать сигнал либо верхнего, либо нижнего уровня, если синтезируемый сигнал двухуровневый. Однако предварительно нужно доказать двухуровневость сигнала и эквивалентность его симметричных участков.
)., Тогда, если симметричные участки локального D-оптимального тестирующего сигнала эквивалентны, то на вход объектов в течение интервалов можно подавать сигнал либо верхнего, либо нижнего уровня, если синтезируемый сигнал двухуровневый. Однако предварительно нужно доказать двухуровневость сигнала и эквивалентность его симметричных участков.
При этом обеспечивается сокращение длины сигнала на  , где N - общее число реализованных этапов за счет исключения из реализации участков расчета планирование каждого этапа. То есть уточнение оценок и синтез каждого участка сигнала производится параллельно с тестированием объекта в начале реализации планируемого этапа.
, где N - общее число реализованных этапов за счет исключения из реализации участков расчета планирование каждого этапа. То есть уточнение оценок и синтез каждого участка сигнала производится параллельно с тестированием объекта в начале реализации планируемого этапа.
II подход применим, если время расчета больше шага дискретизации ( ). При этом непрерывность тестирующего сигнала может быть обеспечен, если планирование каждого этапа ДППИ производить в конце реализации предыдущего этапа, и использовать при этом прогнозируемое значение вектора НМНК оценок к моменту окончания реализации предыдущего этапа. В этом случае планирование каждого этапа осуществляется в конце реализации предыдущего в отличие от первого подхода, когда планирование осуществляется в начале следующего этапа. В данном случае сигнал хуже, так как предполагает планирование не строго локальных D-оптимальных участков из-за замены НМНК оценоких прогнозируемыми значениями.
). При этом непрерывность тестирующего сигнала может быть обеспечен, если планирование каждого этапа ДППИ производить в конце реализации предыдущего этапа, и использовать при этом прогнозируемое значение вектора НМНК оценок к моменту окончания реализации предыдущего этапа. В этом случае планирование каждого этапа осуществляется в конце реализации предыдущего в отличие от первого подхода, когда планирование осуществляется в начале следующего этапа. В данном случае сигнал хуже, так как предполагает планирование не строго локальных D-оптимальных участков из-за замены НМНК оценоких прогнозируемыми значениями.
ОСОБЕННОСТИ РЕАЛИЗАЦИИ ДППИ.
Вычисление начальной оценки  по результатам затравочного тестирования производится по методике пассивного эксперимента методом Гаусса-Ньютона. Начальное приближение определяется из предположения, что известно.
по результатам затравочного тестирования производится по методике пассивного эксперимента методом Гаусса-Ньютона. Начальное приближение определяется из предположения, что известно.
Планирование этапов осуществляется путем решения следующей аргументной задачи:
При планировании эксперимента в задачах нелинейного оценивания нормирование факторов не производится, поэтому в данной задаче пространство планирования определяется следующей системой неравенств:

При этом предполагается, что:  ,
,
где  и
и  - значения входа и выхода объекта в исходном статическом состоянии;
- значения входа и выхода объекта в исходном статическом состоянии;
 и
и  - истинные дискретные значения входа и выхода;
- истинные дискретные значения входа и выхода;
 и
и  - отклонения.
- отклонения.
Для того, чтобы решить задачу проанализируем дисперсионную функцию:

Покажем, что квадратичная форма относительно вектора  является квадратичной формой относительно вектора факторов планирования.
является квадратичной формой относительно вектора факторов планирования.
Таким образом, участки локальных D-оптимальных тестирующих сигналов для линейно-комбинационной модели являются двухуровневыми ( ), а симметричные участки сигнала эквивалентны.
), а симметричные участки сигнала эквивалентны.
Эти свойства позволяют обеспечить непрерывность синтезируемого D-оптимального тестирующего сигнала (за счет того, что мы можем подавать произвольный сигнал  ), а также упростить задачу склеивания участков сигнала.
), а также упростить задачу склеивания участков сигнала.
Известна теорема, что участки локального D-оптимального тестирующего сигнала, предполагающие одно измерение выхода, имеют не более k переключений, то есть при синтезе такого участка сигнала достаточно просмотреть лишь те вершины пространства , которым соответствуют участки сигнала, имеющие не более k переключений. Эта теорема позволяет ускорить планирование этапов ДППИ.
Рассмотрим II случай, когда время расчета больше шага дискретизации ( ). В этом случае синтез очередного участка сигнала производится с использованием прогнозируемых значений НМНК оценок элементов вектора неизвестных коэффициентов
). В этом случае синтез очередного участка сигнала производится с использованием прогнозируемых значений НМНК оценок элементов вектора неизвестных коэффициентов  .
.
Рассмотрим задачу планирования n+1 этапа ДППИ на основе оценки  .
.
Прогнозирование НМНК-оценок неизвестных параметров
Прогнозирование возможно, если на каждом этапе процедуры производится несколько запланированных измерений выхода. Синтез участка, предполагающего несколько измерений выхода, производится по следующему алгоритму:

где  - порядковый номер синтезируемого участка сигнала;
- порядковый номер синтезируемого участка сигнала;
 - i-тая точка плана, которая должна быть реализована на (N+1) этапе процедуры. Эта точка определяет i-тый участок сигнала, определяющий предысторию для i-того измерения выхода (N+1) этапа;
- i-тая точка плана, которая должна быть реализована на (N+1) этапе процедуры. Эта точка определяет i-тый участок сигнала, определяющий предысторию для i-того измерения выхода (N+1) этапа;
 - число планируемых измерений;
- число планируемых измерений;
 - ковариационная матрица вектора
- ковариационная матрица вектора  , если его
, если его

Для формализации данной процедуры необходимо получить рекуррентное выражение, связывающее ковариационную матрицу  c ковариационной матрицей
c ковариационной матрицей  для
для 

Для получения рекуррентной формулы можно воспользоваться известной теоремой из матричной алгебры: 
Тогда получим:

Искомая рекуррентная процедура синтеза участков локального D-оптимального тестирующего сигнала (N+1) этапа, предполагающего  измерение определяется следующими матричными выражениями:
измерение определяется следующими матричными выражениями:
 где
где  .
.
Прогнозирование оценок неизвестных параметров производится на интервале времени между  и
и  измерениями выхода N -ого этапа ДППИ.
измерениями выхода N -ого этапа ДППИ.

Если интервал между и  измерениями больше , то можно производить прогнозирование. При этом предполагается, что интервал между этими измерениями не меньше
измерениями больше , то можно производить прогнозирование. При этом предполагается, что интервал между этими измерениями не меньше  .
.
Оценка  , то есть прогнозирование вектора
, то есть прогнозирование вектора  к моменту реализации N -ого этапа вычисляется из следующего условия:
к моменту реализации N -ого этапа вычисляется из следующего условия:
 - это критерий взвешенного МНК.
- это критерий взвешенного МНК.
 - функция веса;
- функция веса;
- параметр функции веса.
Функция веса вводится для того, чтобы уменьшить влияние на прогноз старых измерений, то есть измерений, удаленных от момента прогнозирования. Обычно функция веса записывается в виде:

Параметр априори неизвестен и должен оцениваться на каждом этапе процедур. Оценка коэффициента находится из условия:
 ,
,
где  - прогнозируемое значение оценок к моменту i-того измерения выхода.
- прогнозируемое значение оценок к моменту i-того измерения выхода.

Можно показать, что оценка вычисляется с помощью следующей рекуррентной процедуры, которая является взвешенным НМНК:
ОСОБЕННОСТИ СИНТЕЗА
НЕЛИНЕЙНЫХ D-ОПТИМАЛЬНЫХ МОДЕЛЕЙ ДИНАМИКИ.
Построение D-оптимальных нелинейных моделей осуществляется на основе ДППИ аналогично процедуре, рассмотренной для моделей линейных систем.
При реализации данной процедуры необходимо учитывать следующие особенности, присущие нелинейным системам:
1)Для нелинейных систем не выполняется принцип суперпозиции (принцип суперпозиции - когда выходной сигнал объекта равен сумме реакций всех входных сигналов), поэтому модели таких систем связывают не отклонения значения входа и выхода от исходного статистического состояния, а истинного значения входа-выхода. Таким образом, производство планирования для нелинейных систем может быть задано системой неравенств:

2) Участки локального D-оптимального тестирующего сигнала для нелинейных систем не являются двухуровневыми, поскольку ни одна из соответствующих им дисперсионных функций не может быть представлена в виде квадратичной формы относительно вектора  .
.
Например, для модели Винера:

Таким образом, локальные D-оптимальные тестирующие сигналы для нелинейных систем являются многоуровневыми, причем число уровней априори неизвестно.
При анализе участков сигнала в общем случае необходимо просмотреть все пространство планирования  , что резко усложняет задачу планирования участков ДППИ.
, что резко усложняет задачу планирования участков ДППИ.
На практике обычно задают три уровня сигнала:  и синтезируется сигнал в классе трехуровневых сигналов:
и синтезируется сигнал в классе трехуровневых сигналов:
Пространство в этом случае будет квадратом, кубом, гиперкубом и так далее, так как для каждого сигнала ограничительные условия одинаковые.

3) Поскольку число уровней априори неизвестно, симметричные участки не эквивалентны, то планирование этапов ДППИ должно всегда производиться в конце реализации предыдущего этапа на основе прогнозируемых значений оценок.
ПОСТРОНИЕ D-ОПТИМАЛЬНЫХ МОДЕЛЕЙ ПРОСТРАНСТВА СОСТОЯНИЙ.
Рассмотрим модель пространства состояний:
При нулевых начальных условиях перейдем к модели типа "вход-выход":
Планирование этапов ДППИ для моделей пространства состояний производится путем решения аргументной задачи:  , полученной из выражения:
, полученной из выражения:

Мы получили модель, представленную в виде ряда Тейлора:

Пространство планирования  , так как объект линейный.
, так как объект линейный.
Поскольку максимизированная квадратичная форма является квадратичной формой относительно вектора U, синтезируемые участки локального D-оптимального тестирующего сигнала для этой модели являются двухуровневыми, а симметричные участки эквивалентны.
Известна теорема, согласно которой синтезируемые участки сигнала имеют не более 2n-1 переключений.
При построении непрерывного тестирующего сигнала на основе точек плана можно использовать те же два подхода, что и для моделей типа "вход-выход".
Тема 17. Планирование эксперимента в условиях неоднородностей




