УСТРОЙСТВ СИЛОВОЙ ПРЕОБРАЗОВАТЕЛЬНОЙ ТЕХНИКИ
Математическое моделирование электропривода
С двигателями постоянного тока
Рассмотрим модель электропривода постоянного тока с двигателем постоянного тока независимого возбуждения (рис.3.1,а).
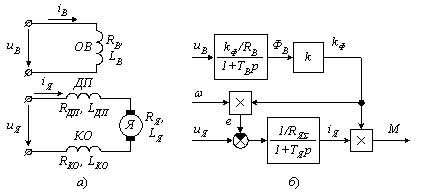
Рисунок 3.1 - Схема обмоток (а) и структурная схема ДПТ (б) параллельного возбуждения с управлением по якорю и возбуждению
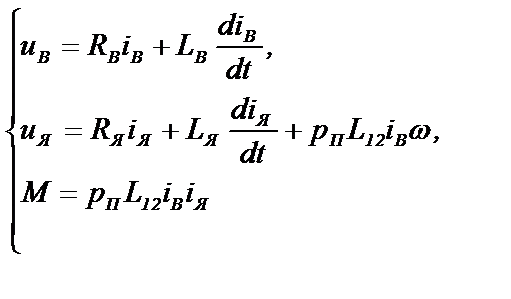
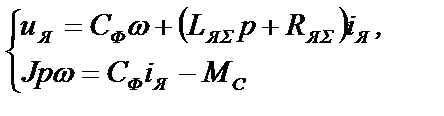
Уравнения электрического состояния ДПТ имеют вид:
 (3.1)
(3.1)
где L12 – взаимная индуктивность между обмоткой возбуждения и якорем;
рП – число пар полюсов обмотки якоря;
RЯΣ = RЯ +RДП +RКО – полное сопротивление якорной цепи, содержащей якорь, дополнительную (ДП) и компенсационную (КО) обмотки;
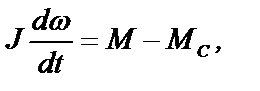
Если моделируется электропривод на базе ДПТ, то к системе уравнений (3.1) нужно добавить уравнение механики:
 (3.2)
(3.2)
где J - момент инерции нагрузки;
МС - момент сопротивления нагрузки.
ДПТ при одновременном управлении им по цепям якоря и возбуждения описывается нелинейной системой уравнений (3.1) и, поэтому, представляет собой нелинейный объект, исследовать который аналитически достаточно сложно. Чаще всего применяется управление ДПТ по цепи якоря с неизменными напряжением uB и током iB возбуждения. В таком случае входящий в уравнение (3.1) комплекс рПL12iB является постоянной величиной, которая называется коэффициентом потока ДПТ:
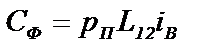 (3.3)
(3.3)
На рис.3.2. приведены функциональная и структурные схемы электропривода с ДПТ, управляемым напряжением якоря иЯ. Нагрузка имеет момент инерции J и оказывает сопротивление моментом МС, равным CФIС .
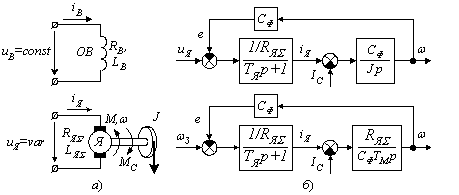
Рисунок 3.2 - Функциональная (а) и структурные схемы (б) электропривода с ДТП параллельного возбуждения, управляемым по якорю
Электропривод описывается системой линейных уравнений:
или
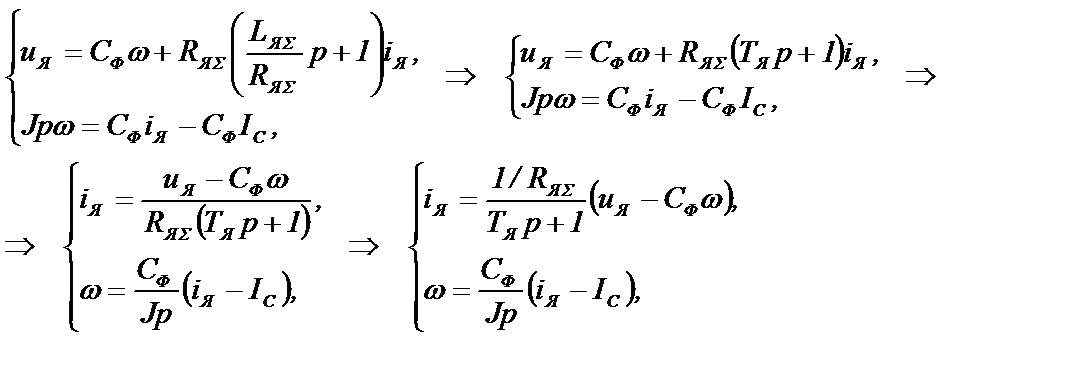 (3.4)
(3.4)
где IС - фиктивный ток сопротивления нагрузки, определяемый из уравнения
МС=CФIС
По последней системе из (3.4) составлена структурная схема электропривода, которая приведена на рис.3.2,б сверху.
На структурной схеме, приведенной на рис.3.2,б снизу, введена механическая постоянная времени ТМ, определяемая из преобразований:
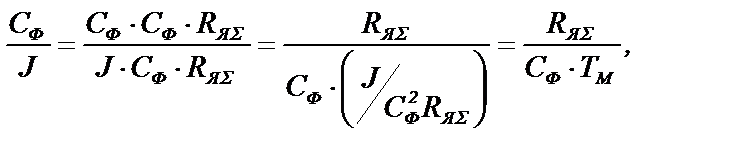 откуда
откуда  (3.5)
(3.5)
Рассчитанный по структурной схеме на рис.3.2,б снизу выходной сигнал ω имеет вид:

где WУ (р) и WВ (р) – передаточные функции электропривода по управлению и возмущению.
Характеристические многочлены передаточных функций WУ (р) и WВ (р) имеют вид, который удобен для аналитических исследований электропривода.
Вопросы для самоконтроля
1. Приведите уравнения, которыми описывается модель ДПТ параллельного возбуждения с управлением по якорю и возбуждению.
2. Приведите структурную схему модели ДПТ с параллельного возбуждения с управлением по якорю и возбуждению.
3. Приведите уравнения, которыми описывается модель электропривода на базе ДПТ параллельного возбуждения с управлением по якорю.
4. Приведите структурную схему модели электропривода на базе ДПТ с параллельного возбуждения с управлением по якорю.
5. Какими постоянными времени характеризуются динамические процессы в электроприводе на базе ДПТ параллельного возбуждения?
Литература [1-9]






