Данный Алгоритм не используется напрямую при решении обязательных заданий курса начертательной геометрии, однако является компонентом некоторых Алгоритмов для решения метрических задач с использованием метода вращения.
Для работы в ортогональных проекциях предлагается следующий порядок действий:
4. 1 Построить три проекции исходной точки, в соответствии со способом ее задания (см. Алгоритм 1 или 3.1).
4. 2 Вычертить траекторию перемещения проекции точки в той плоскости проекций, к которой перпендикулярна координатная ось, служащая осью вращения (см. таблицу 3). Траекторией перемещения является дуга окружности с центром в начале координат и радиусом, равным расстоянию от точки О до проекции исходной точки на данную плоскость.
| Вращение относительно оси
| Траектория – дуга окружности в плоскости
| Изменяющиеся координаты
| Неизменная координата
|
| X
| π3
| y, z
| x
|
| Y
| π2
| x, z
| y
|
| Z
| π1
| x, y
| z
|
Таблица 3 - Характер изменения координат точки при ее вращении относительно координатной оси
y
z (-y)
I
A
A y A I I A y A x
A x O
x (- y) A y О y (-x) A
I I I I I
A I I A A y
A I I I Z A x A z
y (-z) Т о ч к а А л е ж и т в V I I о к т а н т е z z (-y)
I I I
B
I I I I I I
B, B B B y, B z B y B z
B
I I
B O
x (- y) B x B y О y (-x)
I
B
x B x y
y (-z) Т о ч к а В л е ж и т в о I I о к т а н т е
z
z (-y)
I I
C x , C
I I I I I
C z C, C O C
x (- y) О C x , C y y (-x) C z C I I I C I
C y
C y I x y C
y (-z) Т о ч к а л е ж и т в п л о с к о с т и 1 , м е ж д у V и V I I I о к т а н т а м и.
П о д в у м з а д а н н ы м п р о е к ц и я м т о ч е к А, В. и С п о с т р о и т ь и х т р е т ь и п р о е к ц и и. П о с т р о и т ь и з о м е т р и ч е с - к и е п р о е к ц и и п р о е к ц и и т о ч е к. Д а т ь ш е с т ь ч е р т е ж е й. У к а з а т ь о к т а н т ы, в к о т о р ы х н а х о д я т с я т о ч к и.
И з м. Л и с т № д о к у м. П о д п. Д а т а
Р а з р а б. Г н и л у ш а 4. 03. 08 Л и т. Л и с т Л и с т о в
П р о в. Л ю т о р о в и ч З а д а ч а № 1 1
 Н. к о н т р. В а р и а н т 1 1 С П б Г Т И (Т У),
Н. к о н т р. В а р и а н т 1 1 С П б Г Т И (Т У),
У т в. г р у п п а Х Х Х
К о п и р о в а л Ф о р м а т A 4
Рисунок 5 - Пример оформления задания, решенного по Алгоритму 3
4. 3 Отметить на траектории вращения заданный угол и определить новое положение проекции точки в этой плоскости. Данная проекция точки в ее новом положении позволит определить новые значения двух изменяющихся координат (см. таблицу 3) и положение проекций на соответствующие оси.
4. 4 Обозначить проекцию точки на ось вращения, координата по которой не меняется. (В связи с этим траектория перемещения точки в двух остальных плоскостях проекций представляет собой прямую линию, перпендикулярную оси, вокруг которой происходит вращение).
4. 5 После того как получены три проекции точки на оси в ее новом положении, построить ее проекции на плоскости проекций по Алгоритму 1 или 3.1.
4. 6 Описать принадлежность точки, согласно указанному в пп. 1.1.4 и 1.2.3.
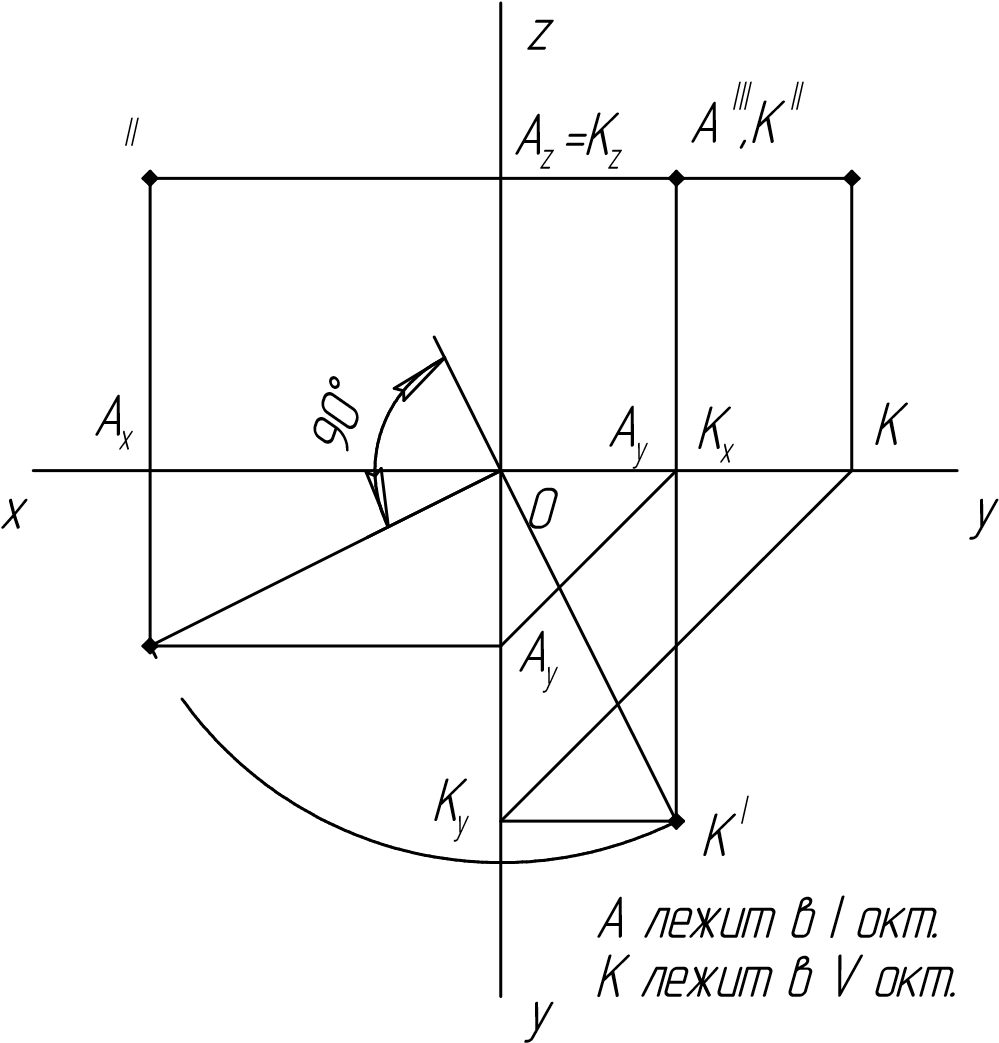 Рисунок 6 иллюстрирует решение следующей задачи: построить I I I точку К, полученную при вращении
Рисунок 6 иллюстрирует решение следующей задачи: построить I I I точку К, полученную при вращении
A K точки А, заданной графическим
способом, на угол +90 (против часовой стрелки) относительно оси Z.
Так как ось Z перпендикулярна плоскости π1, траектория движения точки y будет проецироваться в истинную величину
именно в этой плоскости. Вычертим дугу окружности с центром в точке О и радиусом, равным ОA’, по которой будет перемещаться
I горизонтальная проекция точки A’. Заданный A угол, отложенный на траектории, определит
новое положение горизонтальной проекции точки – K’ Эта проекция определяет положение Kx и Ky. Третья координата неизменна, и Kz=Az. Найденные проекции точки К на оси позволяют получить K’’ и K’’’.
Вращение точки на угол 180 относительно некоторой оси
Рисунок 6 - Пример решения задачи по Алгоритму 4 эквивалентно операции осевой
симметрии относительно той же оси.






