Показатели качества регулирования. Переходной процесс характеризует поведение системы в период с момента нанесения возмущения до установления нового равновесного состояния. Он зависит от динамических свойств объекта и регулятора, входных воздействий и начальных условий.
При одних и тех же воздействиях переходной процесс может протекать поразному. Вид переходного процесса и его характеристики позволяют оценить качество регулирования.
Качество регулирования оценивается отклонением реального переходного процесса от заданного и показывает как быстро и точно в системе устанавливается новое равновесное состояние при ступенчатом возмущении.

Количественными показателями качества регулирования являются:
Статическая ошибка yст – отклонение нового установившегося значения регулируемой величины от заданного.
Динамическая ошибка yдин – максимальное отклонение регулируемой величины от заданного в переходном процессе.
Время регулирования τ Р – время, за которое регулируемая величина достигает нового установившегося значения с заданной точностью ± ε.
Интегральная квадратичная ошибка – квадрат площади между кривой переходного процесса и новым установившимся значением:
59. Синтез параметров регулятора на примере расчета П-регулятора.
Регуляторы – устройства, вырабатывающие управляющие воздействия
при отклонении регулируемого параметра от заданного значения. Регуляторы
классифицируются по назначению, виду используемой энергии, характеристике действия (закону регулирования) и т.п.
По назначению регуляторы подразделяются на специализированные (например, регуляторы уровня, давления, температуры и т.д.) и универсальные с нормированными входными и выходными сигналами и пригодные для управления различными параметрами.
По виду используемой энергии регуляторы подразделяются на электрические, пневматические, гидравлические или не использующие дополнительной энергии (регуляторы прямого действия). Регуляторы прямого действия используют энергию самого объекта управления (регулируемой среды). Как правило это регуляторы, реализующие простейшие законы регулирования, например – П-регуляторы давления.
Выходная величина пропорционального (П) регулятора изменяется пропорционально рассогласованию в пределах зоны регулирования, т.е.:
где d – предел пропорциональности – величина входного сигнала, данная в процентах, под действием которой выходной сигнал изменяется от 0 до 100%. Часто в расчетах используют величину kр=1/d, которая называется
коэффициентом передачи (усиления) регулятора.
Вне предела пропорциональности выходной сигнал равен 0 или 100%.
Предел пропорциональности является настроечным параметром П-регулятора.
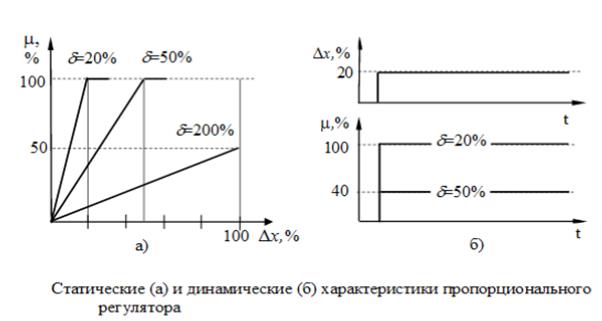
Преимуществами П–регуляторов являются: высокое быстродействие, возможность применения совместно с объектами, не обладающими самовыравниванием. Недостаток – наличие статической ошибки. Статическая ошибка тем больше, чем больше предел пропорциональности.
Расчет П-регулятора

61. Синтез параметров регулятора на примере расчёта ПИД-регулятора.
Wрег=Кп+Ки/Р+Кд*Р
В ПИД регуляторе осуществляют замену
Кд=0,1Ки
Wрег=Кр+Ки/Р+0,1Ки*Р
Расчёт параметров Кр,Ки последующий абсолютно аналогичен ПИ регулятору






