На основе нейронных сетей
Интеллектуальные системы управления, построенные на основе нейронных сетей, – один из ярких примеров бионического подхода, когда принципы функционирования управления живыми организмами эффективно использованы для создания нового поколения систем управления техническими системами.
Нервная система живых организмов состоит из большого числа (от 1010 до 1012) нейронов, типичная структура которого приведена на рис. 4.4, а. Поток электрических сигналов входит в нейрон через его окончания (синапсы), которых в одном ответвлении (дендрите) может быть до 1000. Через дендриты информация поступает в тело клетки, где происходит ее логическая обработка и оценка. Результат этой оценки в виде нервных импульсов (потоков химически активных заряженных веществ – ионов) передается в корни нейронных структур следующего уровня.
Математическая модель единичного нейрона (рис. 4.4, б) легко реализуется в мощных компьютерах. Входные сигналы поступают в сумматор, где определяется их взвешенная сумма (с учетом весовых коэффициентов k1 … kn). Модели отдельных нейронов объединяются в сети, которые могут состоять из многих слоев и иметь различные структуры. Так на рис. 4.4, в показан пример трехслойной нейронной сети с последовательным соединением слоев.

Рис. 4.4. Биологический нейрон (а), его математическая модель (б)
и структура трехслойной нейронной сети (в)
Нейронные сети обучаются разработчиком системы на конкретных примерах. При обучении разработчик вводит информацию о входных и соответствующих (желаемых) выходных сигналах. Специальная программа настройки сети автоматически подбирает весовые коэффициенты для всех нейронов таким образом, чтобы добиться желаемого соответствия. Обучение повторяется на всех известных примерах и аккумулирует весь имеющийся предварительный опыт. Настроенная таким образом нейронная сеть готова к решению новых задач для других, неизвестных до этого, комбинаций входных сигналов.
Главной особенностью метода нейронных сетей является отсутствие предварительно определенного четкого алгоритма решения встающих перед интеллектуальной системой управления задач.
Основы робототехники. Этимология.
ИСТОРИЯ РАЗВИТИЯ РОБОТОТЕХНИКИ
Предыстория робототехники
Корни робототехники уходят в глубокую древность. Уже тогда впервые возникли идеи и были предприняты первые попытки создания человекоподобных технических устройств, подвижных культовых статуй, механических слуг и т. п. Статуи богов с подвижными частями тела (руки, голова) появились еще в Древнем Египте, Вавилоне, Китае.
В«Илиаде» Гомера божественный кузнец Гефест выковывает механических служанок. Аристотель упоминает о приводимых в движение с помощью нитоккуклах-марионетках,из которых создавались целые механические театры. До нас дошли книги Герона Александрийского (I век н.э.), где описаны подобные и многие другие автоматы древности. В качестве источника энергии в них использовались вода, пар, гравитация (гири).
Всредние века большой популярностью пользовались различного рода автоматы, основанные на использовании часовых механизмов. Были созданы всевозможные часы с движущимися фигурами людей, ангелов и т. п. К этому периоду относятся сведения о создании первых подвижных человекоподобных механических фигур — андроидов. Так, андроид алхимика Альберта Великого (1193— 1280) представлял собой куклу в рост человека, которая, когда стучали в дверь, открывала и закрывала ее, кланяясь при этом входящему.
Кстати, в средние века было высказано предположение о возможности создания гомункулуса — живого человечка средствами алхимии. Создание такого гомункулуса химическим путем в колбе описывает Гете в «Фаусте»:
Нам говорят «безумец» и «фантаст», Но, выйдя из зависимости грустной, С годами мозг мыслителя искусный Мыслителя искусственно создаст.
Работы по созданию андроидов достигли наибольшего развития в 18 в. одновременно с расцветом часового мастерства. Механиками-часовщикамибыли созданыандроиды-музыканты,рисовальщики, писцы. К ним относится, например, «флейтист» французского механика Жака Вокансона (1709 – 1789) — фигура в рост человека; с помощью подвижных пальцев «флейтист» исполнял заложенные в его программу 11 мелодий.
Целый ряд человекоподобных автоматов был создан швейцарскими
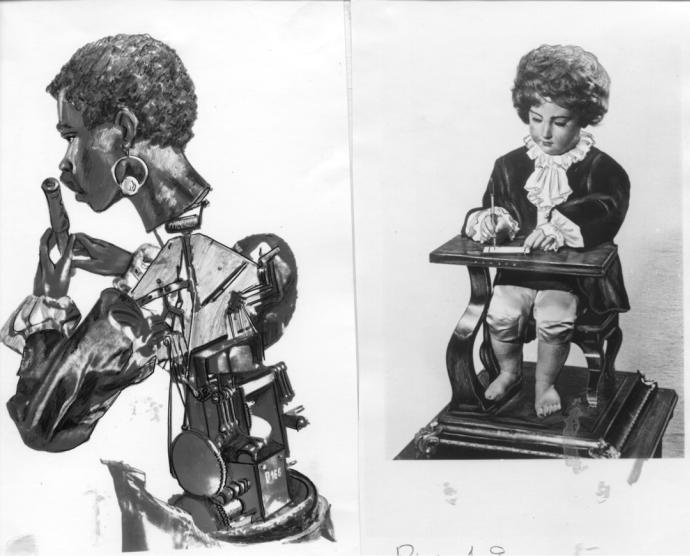
часовщиками Пьером-ЖакомДро(1721—1790)и его сыном Анри Дро (1752 – 1791). От имени последнего было образовано позднее и само название «андроид». Эти человекоподобные игрушки представляли собой многопрограммные автоматы с оперативно сменяемыми программами. Программы задавались с помощью сменных кулачков, устанавливаемых на вращающемся барабане, и других подобных механических устройств. Привод осуществлялся от часового механизма (рис. 1.1 и 1.2).
|
|
|
| Рис.1.1. Механический писец Анри Дро.
| Рис.1.2. Механический негр-флейтист
|
|
| (XIX в., Парижский национальный музей)
|
Из отечественных устройств подобного типа назовем знаменитые часы «яичной» формы с театральным автоматом И. П. Кулибина (1735—1818).В 1820 г. в Петербурге был открыт «Храм очарований» А. И. Галулецкого, обслуживаемый механическими слугами. В 1866 г. И. Мезгин создал«астрономо-исторические»часы, которые помимо времени показывали четыре сценки из истории г. Томска.
Идеи создания «механических» людей, начавшие было затухать вместе с ослаблением роли часового дела в дальнейшем развитии техники, вновь возродились в 20 в. на основе электроники и электротехники. Американский инженер Венсли построил управляемый на расстоянии с помощью свистка автомат «Телевокс», который мог не только выполнять ряд элементарных операций, но и произносить с помощью звукозаписывающей аппаратуры несколько фраз. Англичанин Гарри Мей в 1932 г. создал человекоподобный автомат «Альфа», который по командам, подаваемым голосом, садился, вставал, двигал руками, говорил. Несколько подобных автоматов под названием «Сабор» были построены в Австрии Августом Губером. Они имели управление по радио, могли ходить,
говорить, выполнять различные манипуляции. В основном подобные устройства создавали в рекламных целях, хотя делались попытки использовать их и для различных практических целей.
Любопытно напомнить, что в 1937 г. на Всемирной выставке в Париже демонстрировался радиоуправляемый подвижный робот, созданный советским восьмиклассником В.Машкевичем. К этому времени уже окончательно «прижился» термин «робот», а идеи робототехники все более энергично использовались в научно-фантастическойлитературе.






