СОДЕРЖАНИЕ
ПЕРЕЧЕНЬ ПРИНЯТЫХ СОКРАЩЕНИЙ, СИМВОЛОВ И ТЕРМИНОВ.. 7
ВВЕДЕНИЕ…….. 8
1 АНАЛИЗ СУЩЕСТВУЮЩИХ СИСТЕМ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ, ДИАГНОСТИКИ, КОНТРОЛЯ И СОСТОЯНИЯ ТРАНСПОРТА…. 10
1.1 Концепция построения систем определения местоположения и мониторинга, диагностики, контроля и состояния транспортных средств. 10
1.2 Принцип построения и функционирования спутниковых радионавигационных систем 15
1.3 Архитектура сотовой сети связи стандарта GSM, описание основных подсистем, блоков, и устройств. 21
1.4 Сравнительный анализ аналогов разрабатываемой системы.. 27
1.5 Обзор современного оборудования, предназначенного для спутникового мониторинга транспортных средств. 43
2 ОБОСНОВАНИЕ ТРЕБОВАНИЙ ЗАДАНИЙ НА ДИПЛОМНОЕ ПРОЕКТИРОВАНИЕ. 48
3 РАЗРАБОТКА, ОБОСНОВАНИЕ СТРУКТУРНОЙ СХЕМЫ АВТОМОБИЛЬНОГО УСТРОЙСТВА 50
3.1 Структурная схема автомобильного устройства. 50
3.2 Выбор и обоснование структурных схем основных функциональных блоков приемника спутниковых радиосигналов. 56
3.3 Разработка и анализ структурной схемы GSM модуля. 59
4 РАСЧЕТ ПАРАМЕТРОВ ПРОЕКТИРУЕМОГО УСТРОЙСТВА.. 63
4.1 Энергетические потери при распространении спутниковых радионавигационных сигналов. 63
4.2 Определения радиуса зоны обслуживания базовой станции стандарта GSM-900 72
5 ТЕХНИКО-ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ ЭФЕКТИВНОСТИ СЕРИЙНОГО ВЫПУСКА АВТОМОБИЛЬНОГО УСТРОЙСТВА СИСТЕМЫ ЭКСТРЕННОГО РЕАГИРОВАНИЯ «ЭРА-РБ». 80
5.1 Характеристики автомобильного устройства системы экстренного реагирования «ЭРА-РБ». 80
5.2 Расчет себестоимости отпускной цены автомобильного устройства системы экстренного реагирования «ЭРА-РБ». 81
5.3 Расчет чистой прибыли от серийного выпуска. 86
5.4 Расчет инвестиций в прирост оборотных активов. 87
5.5 Расчет показателей экономической эффективности серийного выпуска 88
5.6 Выводы об эффективности серийного производства. 89
6 РЕСУРСО – И ЭНЕРГОСБЕРЕЖЕНИЕ. СОКРАЩЕНИЕ ЭНЕРГОЗАТРАТ ПРИ ВНЕДРЕНИИ ПРОЕКТИРУЕМОЙ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ 90
ЗАКЛЮЧЕНИЕ… 94
Список использованных источников. 95
ПРИЛОЖЕНИЕ А СПРАВКА ОБ ИСПОЛЬЗОВАНИИ ПАТЕНТНОЙ ЛИТЕРАТУРЫ…. 96
ПРИЛОЖЕНИЕ Б ВЕДОМОСТЬ ДОКУМЕНТОВ.. 103
ПЕРЕЧЕНЬ ПРИНЯТЫХ СОКРАЩЕНИЙ, СИМВОЛОВ И ТЕРМИНОВ
АРМ – автоматизированное рабочее место
АРУ – автоматическая регулировка уровня
АС – абонентская станция
АЦП – аналого-цифровой преобразователь
БС – базовая станция
ДУТ – датчик уровня топлива
ИСЗ – искусственный спутник Земли
КБС – контроллер базовых станций
КП – корреляционный процессор
МП – микропроцессор
НАП – навигационная аппаратура потребителя
НКА – сигналы навигационных космических аппаратов
ОЗУ – оперативное запоминающее устройство
ПБС – подсистема базовых станций
ПЗУ – постоянное запоминающее устройство
ПК – подсистема коммутации
ПМС – подсистема мобильных станций
ПО – программное обеспечение
ППД – пакетная передача данных
ПТ – подспутниковая точка
СБИС – сверхбольшая интегральная микросхема
РИО – регистр идентификации оборудования
РЭС – радиоэлектронное средство
ЦА – центр аутентификации
ЦКПС – центр коммутации подвижной связи
ЦУО – центр управления и обслуживания
ЦУС – центр управления сетью
ШУ – шлюзовой узел
СAN – controller area network (сеть контроллеров)
GPS – global positioning system, ( глобальная система позиционирования)
GPRS – general packet radio service, ( технология скоростной пакетной радиопередачи данных)
GSM – global system for mobile communications, (глобальная система мобильной связи)
LA – location area, (зона местоположения)
SIM – subscriber identification module, (модуль идентификации абонента)
SMS – short message service, (служба коротких сообщений)
TCP – transmission control protocol, ( протокол управления передачей )
ВВЕДЕНИЕ
Спутниковые радионавигационные системы изначально разрабатывались для военных целей – местоопределения различных мобильных объектов. Но при совершенствовании данной системы и методов работы с ней росла и сфера ее применения: от навигации гражданских (не относящихся военным ведомствам) судов до составления высокоточных геодезических карт.
Система в состоянии обеспечить глобальность, точность, непрерывность, высокую доступность и ряд других требований. Точное определение координаты и времени – актуальнейшая задача для самого широкого спектра научно – технических приложений. Это и высшая геодезия, геодинамика, картография, геодезическая и аэрофотосъёмка, воздушная навигация, навигация морских и речных судов, навигация наземного транспорта и другие области. К концу прошлого века созданы две такие системы. Это американская Global Positioning System (GPS) – Глобальная Система Местоопределения (или позиционирования) и российская ГЛОбальная НАвигационная Спутниковая Система (ГЛОНАСС). Основная задача таких систем – определение координаты и времени. Помимо своего прямого назначения эти системы используются для решения научных задач.
Прогресс в области телекоммуникаций, вычислительной техники, сенсорных технологий, навигационных систем привел к развитию и мониторинговых систем быстрого реагирования. Мониторинговая система экстренного реагирования представляет собой программно-аппаратный комплекс, предназначенный для установки на автомобиль в качестве охранно-сервисной системы. Основой задачей мониторинговой системы экстренного реагирования является дистанционный контроль охраняемого автомобиля и своевременное обнаружение возникшей нештатной ситуации, как то – попытка угона, несанкционированное проникновение в салон посторонних лиц, дорожно-транспортное происшествие.
В нашей стране эта система носит название «ЭРА−РБ».
Особенности и преимущества этой системы:
- ускорение оперативного реагирования и улучшение межведомственного взаимодействия экстренных оперативных служб на аварии, ДТП на автомобильных дорогах Республики Беларусь;
- уменьшение количества погибших в ДТП и увеличение процента выживаемости пострадавших;
- создание дополнительного источника доведения до оперативных экстренных служб сообщений о чрезвычайных ситуациях природного, техногенного и антропогенного характера, ускорение реагирования на них, минимизация последствий;
- повышение общего уровня безопасности на автомобильных дорогах Республики Беларусь;
- применение новых форм и методов профилактики ДТП:раннее предупреждение об опасностях на автомобильных дорогах, контроль за соблюдением водителями правил дорожного движения;
- создание единого пространства безопасности на автомобильных дорогах благодаря гармонизации системы «ЭРА−РБ» с системами «ЭРА-ГЛОНАСС» Российской Федерации(РФ) и eCall Европейского Союза.
Таким образом, в данном дипломном проекте поставлены следующие задачи:
- сократить время от обнаружения ситуации до обращения в оперативные службы;
- обеспечить автоматическое определение местоположения абонентского устройства, что увеличит объективность информации о месте происшествия или чрезвычайной ситуации (ЧС);
- наладить отслеживание реагирования оперативных служб на поступившие вызовы;
- сократить общее время реагирования оперативной службы на вызов, что приведет к снижению людских и материальных потерь в результате происшествий и ЧС.
Система «ЭРА ГЛОНАСС» проектировалась в соответствии с распоряжением Правительства РФ и предназначена для снижения уровня смертности и травматизма на дорогах за счет ускорения оповещения служб экстренного реагирования при авариях и других чрезвычайных ситуациях. Система включает навигационно-телекоммуникационные терминалы, которые массово устанавливаются на транспортные средства, начиная с 2013 года и соответствующая инфраструктура, охватывающая все субъекты федерации РФ. Для обеспечения работоспособности системы на территории РФ Правительство РФ зарезервировало специальные телефонные коды 941-949 (уже выделена первая серия в 1000 номеров 941-111-1ххх), которые будут использовать для связи с экстренными центрами приема информации.
Аналогом системы «ЭРА ГЛОНАСС» будет отечественная система «ЭРА-РБ», для которой будет разрабатываться устройство в этой дипломной работе. Главная ее задача – снизить смертность при дарожно-транспортных происшествиях. Автомобильное устройство в данной системе отправляет автоматически при аварийной ситуации все данные о транспорте диспетчеру системы экстренных служб. А именно: установленные данные о местоположении и времени ЧС, информацию о тяжести происшествия, информацию о срабатывании подушек безопасности.
АНАЛИЗ СУЩЕСТВУЮЩИХ СИСТЕМ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ, ДИАГНОСТИКИ, КОНТРОЛЯ И СОСТОЯНИЯ ТРАНСПОРТА
1.1 Концепция построения систем определения местоположения и мониторинга, диагностики, контроля и состояния транспортных средств
Определение координат транспортного средства (ТС) – это одна из самых востребованных услуг в современной автотранспортной сфере, предоставление которой стало возможным с появлением спутниковых радионавигационных систем (СРНС).
Данные системы построены таким образом, чтобы в любой точке местности в любое время с заданной вероятностью пользователь мог осуществить прием спутниковых радионавигационных сигналов и на основе их обработки получить координаты точки местонахождения[1]. Спрос на данную услугу определяется тем кругом задач, которые выполняются с применением автотранспортной техники. К ним относятся следующие задачи:
- перевозка опасных грузов;
- перевозка особо ценных грузов;
- перевозка пассажиров.
В данный момент большими темпами происходит внедрение в автотранспортную систему разработок современной электронной промышленности. В связи с этим все транспортные средства, выходящие с конвейера, оснащаются такими устройствами, как блок управления двигателем, цифровые датчики исполнительных устройств, подключаемые к встроенной диагностической шине. Когда данные устройства только разрабатывались, то считывание данных предусматривалось при наличии физического соединения контрольной шины и устройства анализа информации. Со временем требования изменились, и возникла необходимость построения систем удаленного контроля состоянием автомобиля. Таким образом интеграция современных систем передачи информации, радиосвязи и микроэлектроники позволили создать систему определения местоположения и удаленного управления транспортными средствами (СОМТС).
Для разрабатываемого устройства системы экстренного реагирования «ЭРА-РБ» определение местоположения играет одну из важных ролей. Оно позволяет максимально точно определить место аварии или ЧС, а так же осуществить отслеживание ближайших к месту ДТП экстренных служб. На рисунке 1.1 показана схема функционирования системы экстренного реагирования «ЭРА-РБ».
При дорожно-транспортном происшествии все данные о транспорте отправляются автоматически диспетчеру системы экстренных служб. Оператор в свою очередь связывается с водителем чтобы подтвердить

Рисунок 1.1− Схема функционирования системы экстренного реагирования «ЭРА-РБ».
наличие несчастного случая. После этого он на место аварии высылает службы чрезвычайного реагирования.
Сигнал ДТП обладает приоритетным статусом. Это означает, что он будет передан через любого мобильного оператора, даже если сеть перегружена телефонными звонками. Главными же функциями этой программы являются: установление и передача местоположения и времени ЧС, отправка информации о тяжести происшествия, наличие двусторонней громкой связи, срабатывание подушек безопасности. В момент ДТП оборудование автоматически выполняет экстренный вызов, передаваемый в систему ЭРА-ГЛОНАСС. Вызвать службы быстрого реагирования возможно и при помощи включения определенной кнопки либо пассажиром, либо самим водителем. После этого отправляются все данные о расположении автомобиля, его VIN, времени и тяжести аварии. Стоит отметить, что между диспетчерами и водителем устанавливается голосовая связь, что позволяет отфильтровывать ложные звонки.
Принципиальная особенность ГНСС состоит в том, что роль ОРНТ в
них играют НКА, совершающие автономное орбитальное движение, так же в состав ГНСС обязательно входит еще одна подсистема − наземный комплекс управления (НКУ). Эта подсистема обеспечивает контроль и прогнозирование параметров орбиты НКА, контроль точности и коррекцию бортовых эталонов времени, дистанционный мониторинг исправности бортовой аппаратуры и управление режимами ее работы, составом, объемом и скоростью передачи служебной информации и пр.
Как правило, система управления автопарком включает в себя следующие элементы[6]:
- подсистему навигационных космических аппаратов (НКА);
- телематическое бортовое устройство, расположенное на транспортном средстве - это навигационное устройство (например, GPS/ГЛОНАСС-трекер);
- устройство удаленной диагностики, но иногда контролируются только расход топлива, скорость передвижения, показания датчиков открывания дверей, температуры в рефрижераторах (для грузоперевозок) и т.д.;
- телекоммуникационные инфраструктуры (GSM, радиосвязь);
- сервер для приема, хранения, обработки и анализа данных;
- компьютер диспетчера из центра управления автопарком или пользователя услугами.
На рисунке 1.2 представлена схема функционирования системы определения местоположения и удаленного управления транспортным средством. Центральным устройством в данной системе является автомобильный ГЛОНАСС/GPS контроллер(4,5), который принимает сигналы НКА (1-3).С помощью GSM модуля информация о координатах и параметрах некоторых исполняющих устройств передается через сеть GSM (6) и сеть интернет (11) на рабочие места диспетчера (12) либо потребителя(10) услуг. Вся поступившая за определенный срок информация накапливается в базе данных(13), доступ к которой организован посредством сети интернет(11)[9].

Рисунок 1.2− Схема функционирования системы определения местоположения транспортных средств
Представленная система обладает следующими функциональными возможностями[9]:
- отслеживание местоположения контролируемых подвижных объектов на электронной карте местности;
- контроль и охрана автотранспорта и других подвижных объектов;
- контроль состояния датчиков объекта, подключенных к терминальным модулям, и ситуаций на объектах;
- обнаружение внештатных ситуаций на контролируемых объектах;
- управление исполнительными устройствами объектов при возникновении внештатных ситуаций;
- документирование и архивирование информации от объектов контроля и центра диспетчеризации и мониторинга;
- организация надежных каналов связи между центром диспетчеризации и мониторинга и объектами контроля.
Подвижные объекты оборудуются навигационными контроллерами с антеннами ГЛОНАСС/GPS и GSM. ГЛОНАСС/GPS-антенна принимает сигналы от навигационных спутников, а встроенный процессор использует эти сигналы для непрерывного вычисления географических координат (широта и долгота) и других параметров (скорость, курс, высота) объекта. Встроенный в контроллер GSM/GPRS-терминал выходит через сотовую сеть оператора связи в Интернет и передает отчеты о текущем местоположении объекта на компьютер диспетчерского центра c заданной периодичностью. Для регистрации в сотовой сети GSM используются обычные SIM-карты (как в сотовых телефонах). Кроме данных о местоположении, передается так же информация о состоянии внешних датчиков, установленных на объектах. Контроллеры имеют встроенную энергонезависимую (Flash) память, в которую записываются маршруты объекта при невозможности доставить данные в диспетчерский центр (например, при выходе из зоны обслуживания GPRS, временных проблемах оператора сотовой связи, выключения программы программного обеспечения (ПО) в диспетчерском центре и т.п.). При появлении GPRS соединения контроллер сначала отправит в диспетчерский центр запомненные маршруты и только после этого продолжит работу в режиме реального времени. Таким образом, маршруты объектов не будут потеряны даже при пропадании GPRS-связи. Кроме этого, при отсутствии GPRS-соединения есть возможность получать данные от объектов с помощью SMS-сообщений.
В качестве оборудования для определения местоположения и мониторинга транспортных средств в описанной системе используются изготавливаемые серийно измерительно-исполнительные устройства в комбинации с серийно выпускаемыми специализированными терминалами стандартов GSM, ГЛОНАСС и GPS, которые позволяют[17]:
- определять местоположение, скорость и направление движения подвижных объектов;
- следить за перемещением объекта по заданным географическим зонам и прохождением контрольных точек маршрута;
- передавать в центр диспетчеризации и мониторинга координаты объекта и другую телеметрическую информацию с заданной регулярностью и/или по запросу из центра, а также при возникновении угрозы, при пересечении границы одной из заданных географических зон и при нарушении времени прохождения контрольных точек;
- обрабатывать сигналы охранной системы и других датчиков инициализации внештатной ситуации, установленных на подвижном объекте;
- передавать в центр диспетчеризации и мониторинга сигнал тревоги при срабатывании охранной системы или при попытке воздействия на терминальное устройство, а также сигналы оперативного оповещения персонала центра диспетчеризации и мониторинга о возникновении других внештатных ситуаций;
- передавать по событию SMS-сообщение заданным абонентам сети сотовой связи;
- устанавливать двустороннюю голосовую связь с центром диспетчеризации и мониторинга и обеспечивать скрытый голосовой контроль из центра при посылке водителем сигнала «Тревога»;
- воздействовать на системы объекта (двигатель, система запуска двигателя, тормозная система и т.п.;
- регистрировать в энергонезависимой памяти данных историю движения объекта, состояния датчиков и исполнительных устройств, событий, команд операторов центра диспетчеризации и мониторинга;
- предоставлять возможность считывания содержимого Flash-памяти по эфиру или через встроенный интерфейс RS-232;
Важным звеном в СОМТС является программное обеспечение (ПО), устанавливаемое на персональных компьютерах АРМ пользователей и диспетчеров. Оно позволяет организовать удаленный доступ к информации, присылаемой GPS контроллером, а также управлять его функциями. С помощью ПО можно:
– добавлять и удалять объекты в системе;
– изменять периодичность получения автоматических отчетов от объектов;
– запрашивать объекты с помощью SMS-сообщений;
– контролировать состояние внешних датчиков, установленных на объектах;
– задавать события, интерпретирующиеся как «Тревога», и передавать информацию о «тревогах» в другие программы диспетчерского центра;
– управлять состоянием внешних исполнительных устройств, установленных на объектах;
– отправлять «служебные» команды контроллерам для дистанционного изменения конфигурации.
Таким образом приведенные в данном пункте сведения о СОМТС свидетельствуют о том, что данные системы являются сложной структурой, состоящей из большого числа составных элементов. Для успешного функционирования данной системы необходимо иметь мощную программную и техническую базу.
ОБОСНОВАНИЕ ТРЕБОВАНИЙ ЗАДАНИЙ НА ДИПЛОМНОЕ ПРОЕКТИРОВАНИЕ
Для выбора параметров устройства, разрабатываемого в данной дипломной работе, технологий спутниковой навигации и связи использовались стандарты, рекомендации и другие нормативные документы, опубликованные различными международными организациями в сфере телекоммуникаций и стандартизации.
Главным руководящим документом, в котором представлены общие технические требования, предъявляемые к оборудованию систем сотовой подвижной электросвязи, работающему на территории нашей республики, является Государственный стандарт Республики Беларусь СТБ 1356-2011 [6].
Этот стандарт устанавливает требования к параметрам электромагнитной совместимости радиоэлектронных средств (РЭС) и требования к параметрам излучения РЭС, а также требования по эффективному использованию радиочастотного спектра.
Согласно этому документу для оборудования мобильной станции стандарта E 900/1800 предусмотрены следующие полосы частот:
- 890 – 915 МГц для передачи от мобильной станции (МС) к базовой станции (БС) и 935 – 960 МГЦ для приема сигнала от БС в диапазоне 900 МГц;
- 1710 – 1785 МГЦ для передачи сигнала от МС к БС и 1805 – 1880 МГц для приема сигнала от БС в диапазоне 1800 МГц.
Все технические параметры для оборудования МС в стандарте СТБ 1356-2011 приведены в соответствии со спецификацией TS 25.101, 2009, разработанной Европейским институтом телекоммуникационных стандартов [7].
Мощность передатчика в телефоне ограничена максимум 2 Вт в GSM 900 и 1 Вт в GSM 1800 в соответствии с данным документом. Чувствительность приемника ограничивается значением -102 дБм. При формировании сигнала применяются следующие виды модуляции: GMSK, 8-PSK, QPSK, 16-QAM, 32-QAM. Допустимая пиковая скорость, которая используется для передачи данных от МС к БС составляет 270,833 кбит/с.
Основные технические требования для приемного оборудования спутниковой навигационной системы приведены в интерфейсном контрольном документе NAVSTAR GPS Space Segment / Navigation User Interfaces (ICD-GPS-200).
Спутники излучают открытые для использования сигналы в диапазонах: L1=1575,42 МГц и L2=1227,60 МГц L5=1176,45 МГц. Навигационная информация может приниматься антенной (обычно в условиях прямой видимости спутников) и обрабатываться при помощи GPS-приёмника.
Сигнал с кодом стандартной точности (C/A код — модуляция BPSK), передается в диапазоне L1 и сигнал L2C (модуляция BPSK) в диапазоне L2, распространяется без ограничений на использование. Точность определения координат составляет около 10 метров у гражданских пользователей. Чувствительность приемника в диапазоне L1 для кода С/A составляет не менее -160 дБм.
На сегодняшний день большинство современных производителей выпускают автомобили со встроенной CAN-сетью для связи исполнительных устройств автомобиля с электронным блоком управления. Для контроля состояния данных элементов в разрабатываемом устройстве предусмотрен интерфейс для соединения с CAN-шиной, что позволить подключить его к бортовой сети автомобиля. Основные технические параметры протокола CAN приведены в стандарте ISO 15765-4[10].
В стандарте ISO 11898 определено, что в данном случае CAN-сеть имеет топологию «шина» с физическим уровнем в виде дифференциальной пары. Передача осуществляется кадрами, которые принимаются всеми узлами сети. Синхронная шина, с типом доступа Collision Resolution (CR), который детерминировано (приоритетно) обеспечивает доступ на передачу сообщения, что особо ценно для промышленных сетей управления. Полезная информация в кадре состоит из идентификатора длиной 11 бит (стандартный формат) или 29 бит (расширенный формат, надмножество предыдущего) и поля данных длиной от 0 до 8 байт. Идентификатор говорит о содержимом пакета и служит для определения приоритета при попытке одновременной передачи несколькими сетевыми узлами.
Вероятность появления ошибки передачи составляет 4,7×10-11. Согласно стандарту ISO 15765-4 при длине сети не более 40 метров и при использовании среды передачи в виде дифференциальной пары максимальная скорость передачи данных достигает 1 Мбит/c.
В разрабатываемой системе для подключения контрольных датчиков, организация связи с которыми затруднена или невозможна при помощи проводных линий, предусмотрена возможность построения беспроводной сети на основе стандарта Bluetooth. Требования к параметрам сети и используемым устройствам в данном стандарте приведены в спецификации IEEE 802.15.1[11]. Согласно этому документу Bluetooth-устройства могут обмениваться данными, когда они находятся в радиусе до 200 метров друг от друга (дальность сильно зависит от преград и помех), даже в разных помещениях. В таких сетях применяется свободный от лицензирования диапазон 2,4-2,4835 ГГц. Весь диапазон разделен на 79 частот, с шириной полосы 1МГц. В новой версии два Bluetooth-устройства могут устанавливать соединение с максимальным значением скорости передачи данных 1 Мбит/c менее чем за 5 миллисекунд и поддерживать его на расстоянии до 100 м.
В настоящее время большинство датчиков, установленных на автомобилях, имеют на выходе цифровой сигнал с разрешением 1024 - 4096 уровней, поэтому в проектируемой системе предусмотрен вход для цифровых устройств с разрядностью цифрового сигнала до 12 бит.
Определения радиуса зоны обслуживания базовой станции стандарта GSM-900
Для определения радиуса зоны обслуживания базовой станции стандарта GSM применяется модель Окамуры. Данная модель основана на экспериментальных результатах, полученных Окамурой. Суть ее заключается в следующем: сначала определяется ослабление сигнала при распространении для квазигладкой поверхности (трасса протяженностью несколько километров, на которой средняя высота неровностей не превышает 20 м). В модели Окамуры приняты базовые значения высоты абонентских станций (АС), и эффективные высоты антенн базовых станций (БС)  м, причем последняя определяется над средним уровнем квазигладкой поверхности. В этом случае уровень мощности сигнала на выходе приемной антенны
м, причем последняя определяется над средним уровнем квазигладкой поверхности. В этом случае уровень мощности сигнала на выходе приемной антенны  , дБВт определяется по формуле (для случая городской застройки)[14]:
, дБВт определяется по формуле (для случая городской застройки)[14]:
 , (4.25)
, (4.25)
где  - уровень мощности сигнала в точке приема при распространении в свободном пространстве, дБВТ, определяемый по следующей формуле:
- уровень мощности сигнала в точке приема при распространении в свободном пространстве, дБВТ, определяемый по следующей формуле:
 , (4.26)
, (4.26)
где  - уровень мощности передатчика, дБВт;
- уровень мощности передатчика, дБВт;
 - коэффициент усиления приемной антенны, дБ;
- коэффициент усиления приемной антенны, дБ;
 - коэффициент усиления передающей антенны, дБ;
- коэффициент усиления передающей антенны, дБ;
 - длина волны, м;
- длина волны, м;
 - расстояние между БС и АС, м.
- расстояние между БС и АС, м.
 - дополнительное ослабление сигнала в городе (медианное значение), определенное для квазигладкого городского района при базовых высотах антенн БС и АС, дБ, значение которого определяется, исходя из графика на рисунке 4.2;
- дополнительное ослабление сигнала в городе (медианное значение), определенное для квазигладкого городского района при базовых высотах антенн БС и АС, дБ, значение которого определяется, исходя из графика на рисунке 4.2;
 - коэффициент «высота-усиление антенны БС», учитывающий отличие значения высоты антенны БС от 200 м; определяется из выражения[14]:
- коэффициент «высота-усиление антенны БС», учитывающий отличие значения высоты антенны БС от 200 м; определяется из выражения[14]:
 ; (4.27)
; (4.27)
 - коэффициент «высота-усиление антенны АС», учитывающий влияние реальной высоты антенны АС, который рассчитывается по формуле:
- коэффициент «высота-усиление антенны АС», учитывающий влияние реальной высоты антенны АС, который рассчитывается по формуле:
 ,при
,при  м, (4.28)
м, (4.28)
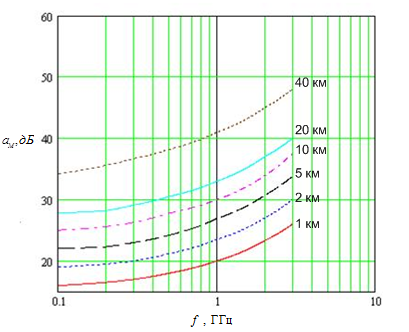
Рисунок 4.2 – Зависимость среднего значения  от частоты и расстояния между БС и АС
от частоты и расстояния между БС и АС
Далее, путем введения поправочных коэффициентов, рассчитывается ожидаемый уровень медианной мощности сигнала с учетом характера местности  ,дБВт:
,дБВт:
 (4.29)
(4.29)
где  - поправочный коэффициент для пригородной зоны и открытой местности, зависит от частоты сигнала и определяется по графикам рисунка 4.3;
- поправочный коэффициент для пригородной зоны и открытой местности, зависит от частоты сигнала и определяется по графикам рисунка 4.3;
 - поправочный коэффициент для учета степени пересеченности местности. Зависит от перепада высот и определяется по графику рисунка 4.4.
- поправочный коэффициент для учета степени пересеченности местности. Зависит от перепада высот и определяется по графику рисунка 4.4.
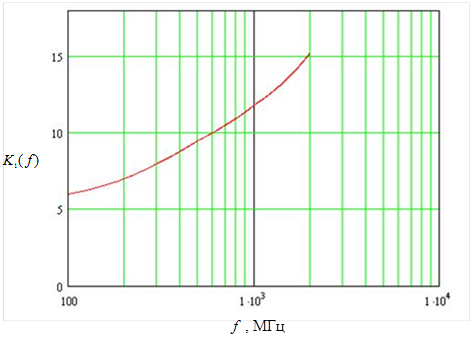
Рисунок 4.3 – Зависимость поправочного коэффициента для случая пригородной зоны
Напряженность поля на входе приемной антенны рассчитывается с учетом собственных шумов приемника мобильного абонента. Кроме того, необходимо учитывать быстрые и медленные замирания путем добавления к пороговому значению напряженности поля  , В/м, запаса по напряженности поля М,В/м, который определяется по формуле:
, В/м, запаса по напряженности поля М,В/м, который определяется по формуле:
 , (4.30)
, (4.30)
где z - нормированное действующее значение напряженности поля в точке приема. Определяется из таблицы 4.2 для заданной вероятности  %:
%:
 - общее стандартное отклонение сигнала, определяемое как сумма стандартных отклонений от среднего уровня в условиях быстрых и медленных замираний[14]:
- общее стандартное отклонение сигнала, определяемое как сумма стандартных отклонений от среднего уровня в условиях быстрых и медленных замираний[14]:
 , (4.31)
, (4.31)
где  - стандартное отклонение сигнала в условиях быстрых замираний,дБ;
- стандартное отклонение сигнала в условиях быстрых замираний,дБ;
 - стандартное отклонение сигнала в условиях медленных замираний, дБ;
- стандартное отклонение сигнала в условиях медленных замираний, дБ;
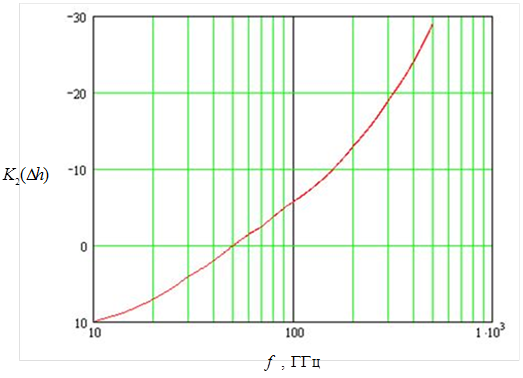
Рисунок 4.4 – Зависимость поправочного коэффициента от перепада высот
Таблица 4.2 – Нормированные действующие значения напряженности поля
| S,%
| 0.5
| 0.6
| 0.7
| 0.8
| 0.9
| 0.95
| 0.99
|
| Z
|
| 0.253
| 0.524
| 0.842
| 1.282
| 1.645
| 2.326
|
Следовательно, чтобы связь была устойчива, необходимо выполнять условие:
 . (4.32)
. (4.32)
В качестве антенн базовых станций в основном используются панельные антенны. Основным элементом таких антенн является блок (панель), представляющий собой металлический кожух квадратного сечения, на каждой стороне которого размещены два симметричных полуволновых вибратора. С целью увеличения коэффициента направленного действия (КНД) панели монтируются на антенной мачте друг над другом на одинаковом расстоянии  . Число панелей на практике выбирается от 2 до 8. Металлический кожух играет роль апериодического рефлектора и, кроме того, служит элементом крепления симметричных вибраторов. Питание антенны осуществляется по коаксиальному кабелю. Вибраторы на антенне размещаются на расстоянии
. Число панелей на практике выбирается от 2 до 8. Металлический кожух играет роль апериодического рефлектора и, кроме того, служит элементом крепления симметричных вибраторов. Питание антенны осуществляется по коаксиальному кабелю. Вибраторы на антенне размещаются на расстоянии  от экрана.
от экрана.
Если предположить, что все симметричные вибраторы панельной антенны возбуждаются синфазно, то диаграмму направленности данной антенны в горизонтальном направлении можно рассчитать с помощью следующего выражения:
В горизонтальной плоскости:
 , (4.33)
, (4.33)
где  (4.34)
(4.34)
 (4.35)
(4.35)
 (4.36)
(4.36)
где  - постоянная распространения, м-1;
- постоянная распространения, м-1;
 - расстояние между симметричным вибратором и металлическим кожухом (рефлектором), обычно принимается равным
- расстояние между симметричным вибратором и металлическим кожухом (рефлектором), обычно принимается равным  ,м;
,м;
 - ширина квадратного металлического кожуха (
- ширина квадратного металлического кожуха ( ),м;
),м;
 - расстояние между вибраторами панели (
- расстояние между вибраторами панели ( ),м.
),м.
Результаты расчетов для секторной антенны с шириной диаграммы направленности в горизонтальной плоскости на уровне -3 дБ равной 120° сведем в таблицу 4.3.
Таблица 4.3 – Результаты расчетов диаграммы направленности антенны БС в горизонтальной плоскости

|
|
|
|
|
|
|
|

|
| 0.703
| 0.472
| 0.829
| 0.983
| 0.602
| 0.734
|
Для любой антенны справедливо соотношение:
 , (4.37)
, (4.37)
где  - коэффициент усиления в максимуме излучения, дБ;
- коэффициент усиления в максимуме излучения, дБ;
 - коэффициент полезного действия (КПД) антенны, обычно принимается равным 0.95;
- коэффициент полезного действия (КПД) антенны, обычно принимается равным 0.95;
 - коэффициент направленного действия антенны, дБ.
- коэффициент направленного действия антенны, дБ.
Тогда
 . (4.38)
. (4.38)
В качестве БС воспользуемся базовой приемопередающей станцией для стандарта GSM, работающая в диапазоне частот 900 МГц, разработанной фирмой ALKATEL. В качестве абонентской станции возьмем оборудование NOKIA-210. Их технические характеристики приведены в таблице 4.5.
Таблица 4.5 – Технические параметры аппаратуры БС и АС
| Параметры
| Значения характеристик станций
|
| базовой
| абонентской
|
| Реальная чувствительность приемника, дБВт
| -104
| -100
|
| Максимальный коэффициент усиления, дБи
| 16.5
|
|
| Мощность передатчика, Вт
|
| 0.25
|
| Излучаемая мощность, дБм
| 52.57
|
|
| Защитное отношение сигнал/помеха в совмещенном канале, дБ
|
|
| Высота антенн над землей, м
|
| 1.5
|
Определение радиуса зоны обслуживания при передаче сигнала от БС к АС (полоса частот: 935-960 МГц)
Для определения радиуса зоны обслуживания базовой станции воспользуемся методом Окамуры – формулы (4.25) - (4.30).
Для того чтобы связь базовой станции и подвижных абонентов была устойчивой, необходимо выполнение условия[17]:
 . (4.39)
. (4.39)
Запас по мощности составляет  =28,52 дБм.
=28,52 дБм.
С учетом значения пороговой чувствительности (таблица 4.2) определим уровень сигнала на входе приемника:
 , дБм. (4.40)
, дБм. (4.40)
Перепишем формулу (4.29) с учетом всех введенных коэффициентов:
 , (4.41)
, (4.41)
Так как в данную формулу входят величины, зависящие от расстояния между БС и АС, то предельные значения расстояния, при которых выполняется условие (4.40) и будут определять границы зоны обслуживания с заданной вероятностью приема S.
По формулам (4.27) и (4.28) определим поправочные коэффициенты, учитывающие реальную высоту антенн БС и АС:
 дБ,
дБ,
 дБ.
дБ.
Дополнительное ослабление сигнала в городе для квазигладкого городского района при базовых высотах антенн БС и АС определим для выбранного радиуса зоны обслуживания по графикам рисунка 4.2, поправочные коэффициенты при  МГц и
МГц и  при
при  м определяются по графикам рисун
м определяются по графикам рисун





