
 В стационарном поле работа консервативных сил зависит только от начального и конечного положения частицы. Представим такое поле, где частица перемещается от разных точек Pi в точку О. Работа сил не зависит от пути, поэтому зависит только от положения точки Р. à Работа будет некоторой ф-ей радиус-вектора r точки Р. Эта ф-я будет обозначатся как U(r):
В стационарном поле работа консервативных сил зависит только от начального и конечного положения частицы. Представим такое поле, где частица перемещается от разных точек Pi в точку О. Работа сил не зависит от пути, поэтому зависит только от положения точки Р. à Работа будет некоторой ф-ей радиус-вектора r точки Р. Эта ф-я будет обозначатся как U(r):
 Найдем работу при перемещении точки из 1 в 2. Т.к. она не зависит от пути, то выберем путь через точку О, тогда:
Найдем работу при перемещении точки из 1 в 2. Т.к. она не зависит от пути, то выберем путь через точку О, тогда:
 или
или
Выражение справа (U1-U2) есть убыль потенциальной энергии или разность значение Еп в начальной и конечной точках пути. Таким образом, работа сил на пути 1-2 равна убыли потенциальной энергии.
Связь между потенциальной энергией и силой.
Каждой точке потенциального поля соответствует, с одной стороны, некоторое значение вектора силы F, действующей на тело, и, с другой стороны, некоторое значение потенциальной энергии Eп.
Для установления связи вычислим элементарную работу dA, совершаемую силами поля при малом перемещении dr тела, происходящем вдоль произвольно выбранного направления в пространстве, которое обозначим буквой r. Эта работа равна
dA=Fdr= - dEп
где F- проекция силы  на направление r. Поскольку в данном случае работа совершается за счет запаса потенциальной энергии Eп, она равна разности потенциальной энергии –dЕп на отрезке оси. А отсюда получаем:
на направление r. Поскольку в данном случае работа совершается за счет запаса потенциальной энергии Eп, она равна разности потенциальной энергии –dЕп на отрезке оси. А отсюда получаем:
F= -dEп/dr;
Если разложить F по осям, то:

В векторном виде сила равна (grad – градиент):

 Градиент – вектор, показывающий направление наибыстрейшего увеличения ф-и. “-“ показывает то, что вектор F направлен в сторону наибыстрейшего уменьшения Eп.
Градиент – вектор, показывающий направление наибыстрейшего увеличения ф-и. “-“ показывает то, что вектор F направлен в сторону наибыстрейшего уменьшения Eп.
à Консервативная сила равна отрицательному градиенту Eп:
Билет 15
Полная механическая энергия частицы – энергия механического движения и взаимодействия, равная сумме кинетической и потенциальной энергий: E = Ek + Ep.
Док-во:
Приращение Ек или Т равно элементарно работе результирующей Fрез всех сил. В стационарном поле это консервативная сила этого поля Fконс и иные силы Fстор. à Fрез = Fконс + Fстор. Робота этих сил идет на приращение кинетической энергии частицы:

Т.к. работа равна убыли потенциальной энергии Аконс = - ΔU, то подставив это в выражение, после преобразований получим:

Отсюда видно, что работа сторонних сил идет на приращение величины T+U, что и есть полная механическая энергия.
Закон сохранения.
Если тела, составляющие замкнутую механическую систему, взаимодействуют между собой только посредством сил тяготения и упругости, то работа этих сил равна изменению потенциальной энергии тел, взятому с противоположным знаком:

По теореме о кинетической энергии эта работа равна изменению кинетической энергии тел:

Следовательно:


Сумма кинетической и потенциальной энергии тел, составляющих замкнутую систему и взаимодействующих между собой посредством сил тяготения и сил упругости, остается неизменной.
Билет 16
Кинетическая энергия механической системы - это энергия механического движения рассматриваемой системы. Обозначается как Ек или Т.
Теорема о кинетической энергии системы — одна из общих теорем динамики, является следствием законов Ньютона. Связывает кинетическую энергию механической системы с работой сил, действующих на тела, составляющие систему. В качестве системы, о которой идёт речь, может выступать любая механическая система, состоящая из любых тел.
Кинетической энергией системы называют сумму кинетических энергий всех тел, входящих в систему. Для определённой таким образом величины справедливо утверждение:
Изменение кинетической энергии системы равно работе всех внутренних и внешних сил, действующих на тела системы.
Док-во теоремы:
Рассмотрим систему материальных точек с массами mi, скоростями vi и кинетическими энергиями Ti=1/2(mivi2). Для малого изменения кинетической энергии (дифференциала), происходящего в течение некоторого малого промежутка времени dt будет выполняться:

Учитывая, что dvi/dt представляет собой ускорение i-ой точки - ai, а dvi/dt— перемещение si той же точки за время dt, полученное выражение можно записать в виде:

Используя второй закон Ньютона и обозначая равнодействующую всех сил, действующих на точку, как Fi получаем:

 , Fidsi есть работа А à
, Fidsi есть работа А à
Суммирование всех уравнений такого вида, записанных для каждой из материальных точек, приводит к формуле для изменения полной кинетической энергии системы:
 Данное равенство выражает утверждение теоремы об изменении кинетической энергии системы в дифференциальном виде.
Данное равенство выражает утверждение теоремы об изменении кинетической энергии системы в дифференциальном виде.
Проинтегрировав обе части полученного равенства по произвольно взятому промежутку времени получим выражение теоремы об изменении кинетической энергии в интегральной форме:
 где T2 и Т1 — значения кинетической энергии системы в моменты времени t2 и t1 cсоответственно.
где T2 и Т1 — значения кинетической энергии системы в моменты времени t2 и t1 cсоответственно.
Необходимо подчеркнуть, что здесь, в отличие от случаев теоремы об изменении количества движения системы и теоремы о движении центра масс системы, учитывается действие не только внешних, но внутренних сил.
Собственная потенциальная энергия системы - механическая энергия системы тел, которая определяется характером сил взаимодействия между телами этой системы и их взаимным расположением.
Рассмотрим систему, между частицами которой действуют лишь центральные силы. Центральные силы – силы, зависящие от расстояния между частицами и направленные по прямой, проходящий через эти частицы (граф. инт. в Вопросе 11).
Покажем, что независимо от системы отсчета работа внутренних сил при переходе системы частиц из одного положения в другое может быть представлена как убыль некоторой ф-и, которая зависит только от расположения частиц в системе, т.е. от конфигурации. Эта ф-я и является собственной потенциальной энергией системы.
Сначала возьмем систему из двух частиц. Работа в К-системе отсчета за время dt будет выглядеть как:

Согласно Третьему закону Ньютона F2=-F1, тогда:

Величина в скобках представляет собой перемещение частицы 1 относительно частицы 2. Вспомним принцип относительности Галилея (вопрос 8), тогда частица 1 перемещается в K’ системе, которая жестко связана с частицей два и перемещается вместе с ней относительно исходной системы K. à dr1 = dr2+dr’1, dr1-dr2=dr’1 и:

 ß Алгебраическая сумма элементарных работ пары сил взаимодействия в произвольной К-системе оказывается равной элементарной работе, которую совершает сила, действующая на одну частицу, в к системе отсчета, где другая покоится. à А1,2 не зависит от выбранной системы отсчета.
ß Алгебраическая сумма элементарных работ пары сил взаимодействия в произвольной К-системе оказывается равной элементарной работе, которую совершает сила, действующая на одну частицу, в к системе отсчета, где другая покоится. à А1,2 не зависит от выбранной системы отсчета.
F1 действующая на частицу 1 со стороны частицы 2 центральная, а значит консервативная. Поэтому является убылью потенциальной энергии 1 в поле частицы 2 или как:

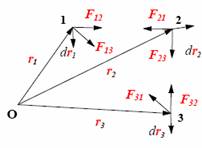 Рассмотрим систему из 3-ех частиц. По тому же принципу:
Рассмотрим систему из 3-ех частиц. По тому же принципу:

 т.к,то
т.к,то  , где Uсоб – собственная потенциальная энергия системы. Uсоб будет завесить от конфигурации системы.
, где Uсоб – собственная потенциальная энергия системы. Uсоб будет завесить от конфигурации системы.
Данное утверждение абсолютно для любого числа частиц, поэтому каждой конфигурации системы частиц присуще свое значение Епсобст и работа всех внутренних центральных сил при изменении конфигурации есть убыль Епсобст:

 А теперь фокус-покус блять. Uсобст не является сумме собственных потенциальных энергий ее частей т.к.
А теперь фокус-покус блять. Uсобст не является сумме собственных потенциальных энергий ее частей т.к.
Преобразуем  представив каждое слагаемое в виде (Uik = Uik+Uki)/2 т.к Uik=Uki, тогда:
представив каждое слагаемое в виде (Uik = Uik+Uki)/2 т.к Uik=Uki, тогда:

, а после группировки по индексам
 , что есть ничто иное как
, что есть ничто иное как
, а в общем виде 

Классификация сил. По характеру взаимодействия:
Массовые (объёмные) силы обусловлены взаимодействием материальных тел на расстоянии, они приложены к каждой точке тела (распределены по всему его объёму). К массовым силам относятся силы гравитационного и электромагнитного взаимодействия. Обычно из чисто формальных соображений к ним добавляют силы инерции (для сил инерции невозможно указать конкретный материальный источник).
Поверхностные силы приложены к участкам поверхности и являются результатом взаимодействия материальных тел при непосредственном контакте. В зависимости от соотношения площади приложения нагрузки и общей площади поверхности рассматриваемого тела, поверхностные силы подразделяются на сосредоточенные и распределённые. К первым относятся нагрузки, площадь приложения которых несоизмеримо меньше площади поверхности тела. Таковыми являются, например, сила нормального давления P и сила трения T между колесом тележки и подкрановой балки, а также силы взаимодействия балки с опорами.
Билет 17
Преобразования Лоренца − преобразования координат и времени какого-либо события при переходе от одной инерциальной системы отсчёта к другой. (Инерциальная система отсчёта – система отсчёта, движущаяся прямолинейно с постоянной скоростью v).
Если инерциальная система отсчёта K' движется относительно инерциальной системы отсчёта K с постоянной скоростью v вдоль оси x, то преобразования Лоренца имеют вид

 y = y', z = z',
y = y', z = z',
c - скорость света в вакууме, β = v/c. Формулы, выражающие x', y', z', t' через x, y, z, t получаются из соотношения (1) заменой v на -v.
 Рис. Система координат K' движется относительно неподвижной системы координат K со скоростью v вдоль оси x. Рис. Система координат K' движется относительно неподвижной системы координат K со скоростью v вдоль оси x.
|
При v < c преобразования Лоренца переходят в преобразования Галилея: x = x' + vt, y = y', z = z', t = t'.
Формулы преобразования скорости:



Сложение скоростей
Тело движется в системе K’, которая сама движется относительно системы K. Скорость движения этого теля относительно неподвижной системы отсчёта K равна веЛакторной сумме скорости этого тела относительно подвижной системы отсчета K’ и скорости той точки подвижной системы отсчёта, в которой в данный момент времени находится тело (относительно неподвижной системы).
Длина стержня в системе К:

Из преобразований Лоренца:

 ,т.о.:
,т.о.: 
Линейные размеры тела наибольшие в той инерциальной системе отсчёта, относительно которой тело покоится.






