Функциональная схема замкнутой САУ. Достоинства и недостатки область применения.

Обратная связь, осуществляемая через устройство измерения УИ, позволяет автоматически следить за У, определять отклонение eи регулятор Р будет уменьшать или устранять полностью это отклонение независимо от того, чем вызвано это отклонение, внешними возмущающими воздействиями или свойствами самого объекта (инерционностью, нестабильностью технологических параметров, изменением технических характеристик объекта в процессе эксплуатации). Поэтому такие САУ с отрицательной обратной связью получили наиболее широкое распространение.
Широкое техническое применение, была система автоматического регулирования с центробежным регулятором в паровой машине Уатта.
Системы автоматического регулирования предназначены для решения трех задач: стабилизации регулируемой величины (стабилизирующая САР), изменения регулируемой величины по известной (программная САР) или неизвестной (следящая САР) программам.
Преимущества такого способа управления:
· Большая гибкость и приспособляемость к различным условиям эксплуатации САУ.
· Возможность уменьшения влияния любых внешних возмущений на объект управления.
· Малая чувствительность к изменению параметров регулятора и объекта управления.
Недостатки:
· Невозможность полного устранения влияния возмущающих воздействий на величину вектора выходных состояний объекта управления.
· Возникновение проблем с устойчивостью САУ при попытках увеличения коэффициента усиления системы.
Функциональная схема комбинированной САУ. Достоинства и недостатки область применения.
Для повышения качества управления применяются САУ, объединяющие достоинства компенсационных и замкнутых САУ рис выше.
Такие САУ называются комбинированными. В этом случае компенсационные связи делаются по наиболее сильнодействующим возмущениям, а действие остальных возмущаю щ их воздействий нейтрализуется за счет обратной связи.
Достоинства:
Наличие ООС делает систему менее чувствительной к изменению параметров регулируемого объекта.
Добавление канала(ов), чувствительного к заданию или к возмущению, не влияет на устойчивость контура ОС.
Недостатки:
Каналы, чувствительные к заданию или к возмущению, обычно содержат дифференцирующие звенья. Их практическая реализация затруднена.
Не все объекты допускают форсирование.
Типовые регуляторы и их структура.
П -регулятор
Функциональная схема П-регулятора с сервоприводом с пропорциональной или интегральной скоростью перемещения изображена на рис. 1.
Рис. 1. Структурная схема регулятора, состоящего из усилителя, сервопривода и отрицательной обратной связью
Отрицательная обратная связь в регуляторе осуществляется по положению регулирующего органа путем подачи на вход устройства обратной связи сигнала с выхода сервопривода. Конструктивно обратная связь осуществляется с помощью механической, электрической или другой передачи в зависимости от типов сервопривода и командно-усилительного устройства. Характеристики П-регуляторов (операторная и частотная) имеют вид:
Wр (р) = 1 ⁄ Wо.с (р); Wр (iщ) = 1 ⁄ Wо.с (iщ) (1.1)
Для того, чтобы приведенное выше выражение было тождественно уравнению пропорционального регулятора xр = Kр y*, необходимо выполнить условие:
Wо.с (р) = Xо.с (р) ⁄ xр (р) = 1 ⁄ Kр (1.2)
В соответствии с этим условием обратная связь должна выполняться на базе безинерционного усилительного звена. Коэффициент усиления звена обратной связи kо.с = д = 1 ⁄ Kр называют степенью жесткой (т. е. неизменной во времени) обратной связи.
П-регуляторы имеют орган настройки для изменения д (Kр), который служит параметром его настройки. Переходная характеристика реального П-регулятора (рис. 2) несколько отличается от идеального в начальной своей части из-за ограниченной скорости сервопривода.
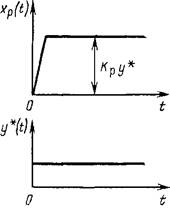
Рис. 2. Кривая переходного процесса П-регулятора
ПД -регулятор
Функциональная схема ПД-регулятора представлена на рис. 3, а. Дифференцирующая составляющая формируется специальным прибором — дифференциатором, обладающим характеристикой реального дифференцирующего звена. На его выходе формируется сигнал, пропорциональный скорости изменения регулируемой величины.
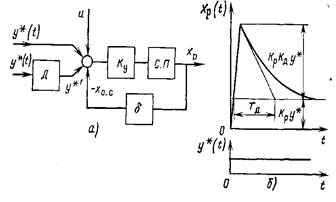
Рис. 3. ПД-регулятор: а — структурная схема; б — кривая переходного процесса
Скоростной сигнал суммируется с сигналом по отклонению регулируемой величины. Результирующий сигнал поступает на вход усилителя. Усилитель и сервопривод охватываются жесткой отрицательной обратной связью. В замкнутом контуре усилитель— привод — обратная связьформируется П-закон регулирования с коэффициентом усиления Kр. Динамическая характеристика реального ПД-регулятора имеет вид

Переходная (временная) характеристика ПД-регулятора с сервоприводом с ограниченной скоростью изображена на рис. 3, б и представляет собой сумму временных характеристик пропорционального и реального дифференцирующего звеньев. Параметром настройки собственно регулятора служит Kр (степень обратной связи д); параметрами настройки дифференциатора служат коэффициент усиления Кд и постоянная дифференцирования Тд, произведение которых характеризует степень ввода дифференциальной составляющей в ПД-закон регулирования.
3. ПИ- регулятор
Реальные ПИ-регуляторы тепловых процессов имеют два вида функциональных схем (рис. 4). В первом варианте (рис. 4, а) сервопривод охватывается отрицательной обратной связью (ООС) и его характеристика не влияет на формирование закона регулирования, целиком определяемого характеристикой устройства обратной связи. Во втором варианте (рис. 4, б) сервопривод не охватывается обратной связью, и ПИ-закон регулирования формируется охватом обратной связью только усилителя Ку. При этом динамические характеристики регулятора в целом определяются динамическими свойствами цепи, состоящей из последовательно включенных замкнутого контура (Ky —Wo . c) и сервопривода. Оба варианта структурных схем ПИ-регуляторов используются в их промышленных исполнениях.
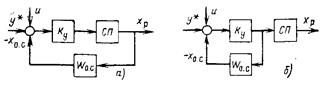
Рис. 4. Структурные схемы ПИ-регуляторов:
а — сервопривод охваченООС;б — сервопривод не охвачен ООС
В первом варианте устройство обратной связи должно иметь динамическую характеристику реального дифференцирующего звена
В этом случае регулятор в целом независимо от типа сервопривода воспроизводит динамику ПИ-регулятора


Если принять Тд =Ти и Kр =1/Kд, получим
 т.е. передаточную функцию ПИ-регулятора, описываемого также дифференциальными уравнениями
т.е. передаточную функцию ПИ-регулятора, описываемого также дифференциальными уравнениями

 и
и
В промышленных ПИ-регуляторах в качестве обратных связей используют различные устройства: электрические, пневматические и гидравлические. Но все они служат аналогами реального дифференцирующего звена, имеют соответствующие ему динамические характеристики, и называются устройствами гибкой или упругой (изменяющейся во времени) обратной связи.
При втором варианте исполнения ПИ-регулятора (рис. 4, б) возможны два случая: 1) сервопривод имеет характеристику интегрального звена (например, электрический или гидравлический сервопривод с переменной скоростью); 2) сервопривод обладает характеристикой пропорционального звена (мембранный сервопривод с уравновешивающей пружиной). В обоих случаях в соответствии с правилом определения результирующей характеристики двух последовательно включенных звеньев
Wp (p) = WКУУ (p)Wс.п (p), (3.3), гдеWКУУ (p) = 1 ⁄ Wо.с (р).
При использовании сервопривода с передаточной функцией интегрального звена Wс.п (p) = 1⁄ TР передаточная функция регулятора имеет вид

При этом для формирования ПИ-закона с помощью устройства обратной связи необходимо, чтобы выдерживалось соотношение
1/Wо.с (р) = WКУУ (р) = Kр (1+TР) (3.5)
что обеспечивает обратная связь с оператором
Wо.с (р) = Kо.с /(1+TР) = д/(1+TР) (3.6)
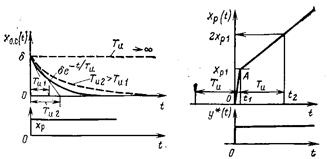
Рис. 5. Переходный процесс в устройстве Рис. 6. Переходный процесс ПИ-регулятора обратной связи
Последнее уравнение служит оператором инерционного звена первого порядка. При охвате Ку такой обратной связью оператор регулятора в целом имеет вид
Wр (р) = Kр (1+1/TиР)
Параметрами настройки ПИ-регулятора служат Kр и Ти.
Если сервопривод имеет характеристику пропорционального звена и не охватывается обратной связью (рис. 4, б), то для того, чтобы выполнялось условие (3.2), Wо. c (p) должно быть реальным дифференцирующим звеном.
Постоянная времени ПИ-регулятора Ти численно равна подкасательной Тд к переходной кривой реального дифференцирующего звена (рис. 5).
Промышленные регуляторы имеют специальные приспособления— органы настройки для изменения Kр (д) и Ти в достаточно широких, но ограниченных пределах. Так как подача на вход регулятора ступенчатого сигнала не составляет труда, фактически установленные значения Кр и Tи можно легко определить из его экспериментальной переходной кривой (рис. 6). Наклонный участок OA на кривой объясняется наличием у промышленного ПИ-регулятора сервопривода с конечной (ограниченной) скоростью перемещения выходного вала редуктора. Из этого графика следует, что
Kр = xр1 /y* (3.7)
а Ти численно равно времени, необходимому для перемещения выходного вала сервопривода из положения xр1 до его удвоенного значения 2хр1. Отсюда второе название Tи — время удвоения выходного сигнала ПИ-регулятора xр при подаче на его вход ступенчатого сигнала у*.
Из уравнения динамики идеального ПИ-регулятора следует, что Кр /Ти определяет степень ввода интегральной составляющей в ПИ-закон регулирования
Действительно, при безграничном увеличении Ти второй член в
 последнем уравнении стремится к нулю и регулятор из пропорционально-интегрального переходит в П-регулятор. При этом экспонента (вида де- t / T и) на выходе реального дифференцирующего звена, используемого в качестве устройства обратной связи, вырождается в ступенчатый сигнал д (рис. 5).
последнем уравнении стремится к нулю и регулятор из пропорционально-интегрального переходит в П-регулятор. При этом экспонента (вида де- t / T и) на выходе реального дифференцирующего звена, используемого в качестве устройства обратной связи, вырождается в ступенчатый сигнал д (рис. 5).
4. ПИД-регулятор
Закон регулирования
Wр (р) = Kр +Kр /TиР +Kд TдР (4.1)
в реальных регуляторах формируется путем последовательной (рис. 7, а) или параллельной (рис. 7, б) коррекций ПИ-регулятора с помощью реального дифференцирующего (РД) звена. В обоих случаях ПИД-закон воспроизводится лишь приближенно.
При последовательной коррекции


Где

При параллельной коррекции

Где


Рис. 7. Последовательная (а) и параллельная (б) коррекция ПИ-регулятора с помощью дифференцирующего звена
Рис. 8. Переходные характеристики ПИД-регуляторов
ПИД-регулятор имеет четыре параметра настройки: Kр, Tи, Tд и Kд, которые могут быть получены из экспериментальных кривых разгона ПИ-регулятора и РД-звена, снятых по отдельности. Комплексные параметры настройки реального ПИД-регулятора K*р и T* можно определить по формулам (4.2) (4.3).
На рис. 8. приведена кривая разгона реального ПИД-регулятора с аналоговым выходом (сплошная линия). В отличие от идеального (прерывистая линия) она имеет ограниченный и плавно затухающий «всплеск» x*р, связанный с дифференцированием ступенчатого сигнала с помощью РД-звена.
Метод затухающих колебаний
Применение этого метода позволяет настраивать регуляторы без выведения системы на критические режимы работы. Так же, как и в предыдущем методе, для замкнутой системы с П-регулятором, путем последовательного увеличения Kp добиваются переходного процесса отработки прямоугольного импульса по сигналу задания или возмущения с декрементом затухания D = 1/4.
Далее определяется период этих колебаний Tк и значения постоянных интегрирования и дифференцирования регуляторов Tи и Tд
Для ПИ-регулятора: Tи = Tк /6;
После установки вычисленных значений Tи и Tд на регуляторе необходимо экспериментально уточнить величину Kp для получения декремента затухания D = 1/4. С этой целью производится дополнительная подстройка Kp для выбранного закона регулирования, что обычно приводит к уменьшению Kp на 20 ÷ 30%. Аналогичный метод настройки используется в адаптивных регуляторах американской фирмы "Фоксборо".
Функциональная схема разомкнутой САУ. Её достоинства и недостатки, область применения.
Для автоматического управления объектом, как минимум, необходимо специальное техническое устройство, вырабатывающее требуемое управляющее воздействие. Такое устройство называется регулирующим или просто регулятором. Следовательно, простейшая функциональная система управления будет состоять из объекта управления ОУ и регулятора Р

Рис. Разомкнутая САУ
Регулятор Р вырабатывает управляющий сигнал U в зависимости от целей управления, задаваемых сигналом gз, называемый задающим, который подается на вход регулятора. Этот задающий сигнал может изменяться вручную или специальным задающим устройством ЗУ.
Если целью управления является стабилизация выходной величины У, то gз должна быть также постоянной величиной (gз = const). Такая САУ называется системой стабилизации.
Если величина У должна меняться по заранее известному закону, то ЗУ должно вырабатывать сигнал gз по определенной программе. Такая САУ называется системой программного управления.
В том случае, когда роль ЗУ играет другой технологический агрегат, с которым объект управления должен работать согласованно, и закон изменения gз заранее не известен, САУ называется следящей.
Роль регулятора Р состоит в выработке управляющего сигнала по такому закону во времени U(t), который обеспечит с необходимой точностью достижение целей управления.
Простейшая САУ, представленная на рис., применима только при невысоких требованиях к точности управления, т.к. на объект управления действуют возмущения f. Для их нейтрализации применяют более сложную САУ.
Недостаток разомкнутых САУ — малая точность выполнения заданного закона управления, так как возмущающие воздействия не компенсируются. Поэтому такие системы в основном применяют для автоматизации процессов пуска и останова машин и механизмов, когда не требуется точное выполнение заданного закона изменения скорости (насосы, вентиляторы, конвейеры, компрессоры и др.), а также для обеспечения требуемой последовательности рабочих операций.
4. Функциональная схема САУ c компенсацией возмущения. Её достоинства и недостатки, область применения.

Рис. Система управления с компенсацией возмущения
Система дополнительно содержит связь между регулятором и возмущающим воздействием с помощью устройства измерений (УИ) или датчика этого воздействия. Благодаря такой связи регулятор может компенсировать действие возмущения на выходную величину У с помощью управляющего воздействия U.
Принцип регулирования по возмущающему воздействию часто называется также принципом компенсации возмущений, а САУ называется компенсационной. Она обеспечивает более точное достижение целей регулирования по сравнению с простейшей разомкнутой системой, но имеет ряд существенных недостатков. Во-первых, возмущающих воздействий, как правило, много, и, во-вторых, эти воздействия сложно и довольно часто просто невозможно измерить.
Например, для стабилизации температуры в помещении можно измерять температуру наружного воздуха и в зависимости от этого автоматически управлять нагревательными приборами. Но этого будет недостаточно.
Необходимо еще измерять силу и направление ветра, время суток, облачность, состояние вентиляционных устройств и т.д.








