Простейшей задачей различения является задача различения двух полностью известных сигналов. В этом случае полагается, что принимаемые полезные сигналы не содержат случайных несущественных параметров (или значение этих параметров точно известно заранее). Задача моделирует в первую очередь так называемый когерентный прием, при котором начальная фаза принимаемого сигнала известна на приемной стороне. Такой прием возможен, например, в условиях, когда фаза медленно изменяются во времени. Это позволяет отслеживать (измерять) ее на приемной стороне и тем самым обеспечивать ее знание к моменту приема очередного двоичного сигнала. Кроме того, задача представляет первое, идеализированное рассмотрение более широкого класса задач различения и ее решение позволяет сделать ряд важных практических выводов общего характера. Формулировка задачи аналогична приведенной в предыдущем параграфе.
На вход системы на заданном интервале наблюдения t Î(0, T) поступает колебание
 , i =1 или 2, (4.3.1)
, i =1 или 2, (4.3.1)
состоящее из полезного сигнала  , который может принимать одно из двух значений
, который может принимать одно из двух значений  или
или  , и стандартной гауссовской помехи n (t). Система по наблюдению { u (t), t Î(0, T)} принимает решение о том, какой сигнал присутствует на входе
, и стандартной гауссовской помехи n (t). Система по наблюдению { u (t), t Î(0, T)} принимает решение о том, какой сигнал присутствует на входе  или
или  .
.
Заданы: детерминированные функции  (t) и
(t) и  (t), априорные вероятности P 1 и P 2 первого и второго сигналов, статистика помехи.
(t), априорные вероятности P 1 и P 2 первого и второго сигналов, статистика помехи.
Требуется определить оптимальный алгоритм преобразования наблюдения { u (t), t Î(0, T)}, которое тождественно определяется вектором наблюдений  , в решение
, в решение  или
или  .
.
Априорные сведения, приведенные в формулировке задачи, позволяют записать аналитические выражения для условных (по  и
и  ) ПВ наблюдения
) ПВ наблюдения  - функций правдоподобия
- функций правдоподобия  и (см.§3.7)
и (см.§3.7)
 i =1,2. (4.3.2)
i =1,2. (4.3.2)
Согласно общему оптимальному правилу решений (4.2.14) нужно сформировать два числа  и
и  и сравнить их
и сравнить их
 , (4.3.3)
, (4.3.3)
т.е. выяснить, какое из 2-х неравенств > или < имеет место. Неравенство не нарушается, если обе его части подвергнуть произвольному монотонно возрастающему преобразованию. Поэтому после логарифмирования (3), возведения в квадрат двучленов и интегрирования получаем оптимальный алгоритм различения полностью известных сигналов
 , (4.3.4)
, (4.3.4)
где Y 1 и Y 2 - так называемые корреляционные интегралы принимаемого колебания u (t) с первым  (t) и вторым
(t) и вторым  (t) сигналом
(t) сигналом
 ,
,  , (4.3.5)
, (4.3.5)
а Э 1 и Э 2 - энергия первого и второго сигналов.
Применительно к системам КИМ двоичные сообщения 0 и 1 ( и ) можно считать равновероятными P 1= P 2=0,5. При этом оптимальный алгоритм различения (4) упрощается
и ) можно считать равновероятными P 1= P 2=0,5. При этом оптимальный алгоритм различения (4) упрощается
 . (4.3.6)
. (4.3.6)
Наибольший практический интерес представляют два частных случая задачи различения: различение сигналов с одинаковыми энергиями и различение нулевого и ненулевого сигналов.
Задача различения сигналов с одинаковыми энергиями моделирует ряд практических ситуаций и, в частности, прием сигналов КИМ ЧМ и КИМ ФМ. В этом случае оптимальный алгоритм различения (6) преобразуется в
 . (4.3.7)
. (4.3.7)
Оптимальная система должна сформировать и сравнить между собой два корреляционных интеграла (5).
Структурная схема соответствующего оптимального РПрУ приведена на рис.4.2. Это первая конкретная схема оптимальной системы, полученная нами на основании теоретического исследования без каких-либо предвзятых идей о ее структуре. Именно в этом состоит основное достоинство и привлекательность метода статистической оптимизации при синтезе систем. Так как принимаемые колебания u (t) в современных РПрУ имеют очень маленькую мощность, практические соображения требуют введения усиления в канал приема. Последнее отражено в схеме введением одинаковых коэффициентов усиления K в оба канала. Усиление, особенно СВЧ, производится, как правило, с преобразованием частоты. С точки зрения теории РТС - это второстепенные операции, которые определяются состоянием техники приема. Существенным является то, что в конечном счете оптимальная система должна сформировать два корреляционных интеграла (осуществить операции(5)) и сравнить между собой (Сх.Ср. - схема сравнения) полученные числа Y 1 и Y 2.
Алгоритм (7) и рис.4.2. непосредственно определяют структуру системы с сигналами КИМ ЧМ, для которых характерно равенство энергий. Для систем с сигналами КИМ ФМ, кроме равенства энергий характерно, что сигналы отличаются друг от друга только знаком (или сдвигом по фазе на  )
)
 ,
,  , (4.3.8)
, (4.3.8)
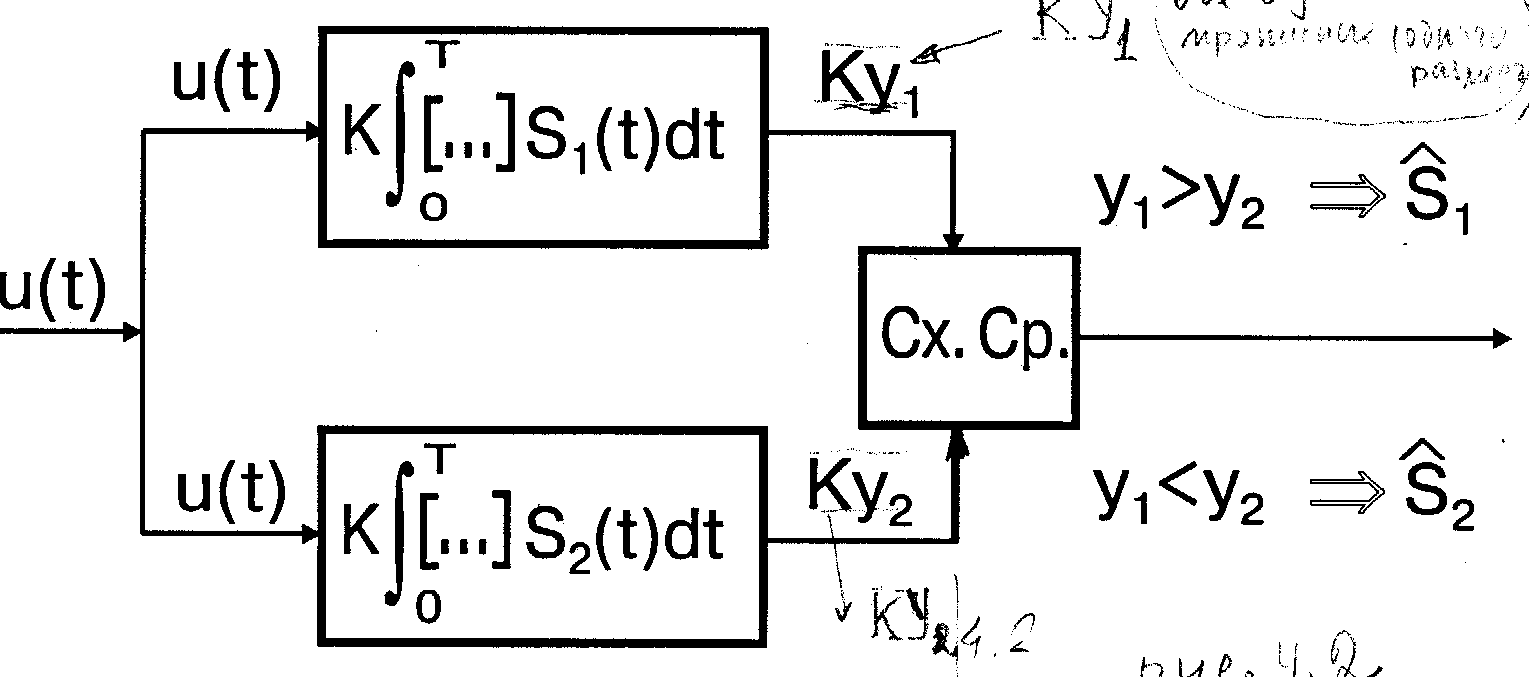
Рис. 4.2
При этом оптимальный алгоритм решения (7)
может быть преобразован к таком виду
 . (4.3.9)
. (4.3.9)
Следовательно, оптимальная система обработки должна формировать корреляционный интеграл
 (4.3.10)
(4.3.10)
и сравнивать его с порогом Y п =0. Структурная схема устройства показана на рис. 4.3. Вместо схемы сравнения (Сх.Ср) используется пороговое устройство ПУ с пороговым уровнем Y п =0. На выходе ПУ принимается решение  , если Y > Y п =0 и,
, если Y > Y п =0 и,  , если Y < Y п =0.
, если Y < Y п =0.
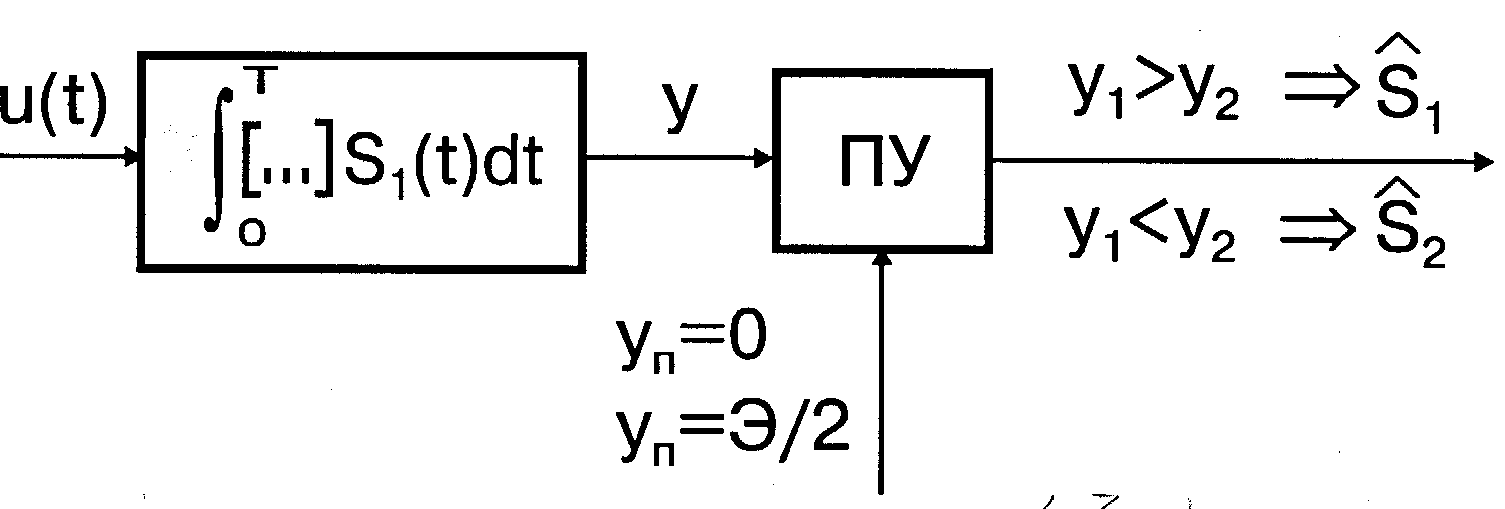
Рис. 4.3
При различении нулевого и ненулевого сигналов характерно равенство нулю одного из сигналов, положим
s 2(t)=0, Э 2=0, Y 2=0, а s 1(t)= s (t), Э 1= Э, Y 1= Y.
Оптимальный алгоритм решений  или
или  согласно (6) принимает вид
согласно (6) принимает вид
 . (4.3.11)
. (4.3.11)
Это значит, что оптимальная система должна формировать корреляционный интеграл, стоящий в левой части неравенства (11) и сравнивать его с априорно известным порогом Y п = 0,5Э. Структурная схема оптимальной системы обработки имеет вид, подобный схеме рис.4.3. Отличие состоит лишь в величине порогового уровня Y п. Принимается решение о наличии ненулевого сигнала, если Y > Y п = 0,5Э и наоборот.
Приведенное рассмотрение позволяет заключить, что при различении полностью известных сигналов основной (существенной) процедурой в системе оптимальной обработки наблюдений является формирование корреляционных интегралов принимаемого колебания { u (t), tÎ (0, T)} с образцами полезных сигналов, которые могут поступить на вход системы. Эта же процедура с небольшими изменениями окажется основной во многих других системах оптимальной обработки принимаемых колебаний. Поэтому представляет интерес рассмотреть практические методы формирования корреляционных интегралов.






