Исходя из вышеизложенного, для определения устойчивости по критерию Найквиста необходимо построить амплитудно – фазо - частотную характеристику разомкнутой системы автоматического регулирования уровня.
В общем виде передаточную функцию разомкнутой САР с регулятором можно найти по формуле:
 . (8)
. (8)
Пример: передаточная функция разомкнутой системы с ПИ- регулятором примет вид:
 (9)
(9)
Синтез разомкнутой САР с ПИД – регулятором
Передаточная функция разомкнутой системы с ПИД – регулятором записывается по алгоритму, описанному выше.
Пример: Для получения передаточной функции разомкнутой САР с ПИД- регулятором воспользуемся формулой 8:
 (10)
(10)
Оценка устойчивости САР
Запас устойчивости по амплитуде и по фазе системы с ПИ- регулятором
По критерию Найквиста проанализируем, является ли устойчивой САР. Для этого в Маткаде построим АФЧХ разомкнутой системы. Полученные графики позволят также определить запасы устойчивости системы по фазе и по амплитуде.
Пример: Построение АФЧХ разомкнутой системы с ПИ- регулятором в Маткаде показано на рисунке9.


Рисунок 9 - АФЧХ разомкнутой системы с ПИ – регулятором
По АФЧХ разомкнутой системы с ПИ – регулятором можно сделать вывод, что замкнутая система с ПИ- регулятором является устойчивой по критерию Найквиста. Проведя дополнительные построения, определим: запас устойчивости по амплитуде составляет А=1/U=4, по фазе запас устойчивости Q=500.
7.3.2 Запас устойчивости по амплитуде и фазе системы с ПИД –
Регулятором
Пример построения АФЧХ разомкнутой системы с ПИД – регулятором показан на рисунке 10.

Рисунок 10 – АФЧХ разомкнутой системы с ПИД –регулятором.
Из рисунка 10 видно, что, по критерию Найквиста замкнутая система с ПИД- регулятором является устойчивой. Проведя дополнительные построения, определим: запас устойчивости по амплитуде составляет А=1/U=0,33, по фазе запас устойчивости Q=400.
Определение показателей качества управления
Замкнутой САР
Различают 4 группы критериев качества регулирования:
¾ Критерии точности - используют величину ошибки в различных типовых режимах.
¾ Критерии величины запаса устойчивости - оценивают удаленность САР от границы устойчивости.
¾ Критерии быстродействия - оценивают быстроту реагирования САР на появление задающего и возмущающего воздействий.
¾ Интегральные критерии - оценивают обобщенные свойства САР: точность, запас устойчивости, быстродействие.
Существует два основных подхода к оценке качества:
1. Первый использует информацию о временных параметрах системы: h (t), w (t); расположение полюсов и нулей ПФ замкнутой системы F(p).
2. Второй использует информацию о некоторых частотных свойствах системы: полоса пропускания; относительная высота резонансного пика; и т.д.
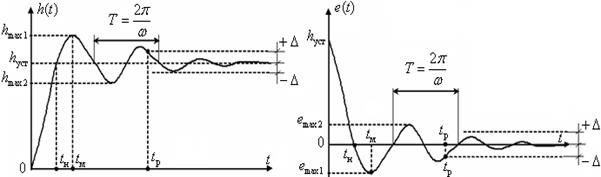
| Рисунок 11 – Переходная функция
| Рисунок 12 – Весовая функция
|
Рассмотрим прямые оценки качества переходных процессов, показанные на рисунках 11 и 12:
1. Установившееся значение выхода, определяющее статическую точность системы:
 (11)
(11)
2.  – время переходного процесса, определяющее быстродействие системы. Оно определяется из соотношения
– время переходного процесса, определяющее быстродействие системы. Оно определяется из соотношения
 (12)
(12)
где  - заданная малая величина, характеризующая точность системы.
- заданная малая величина, характеризующая точность системы.
 предварительно задается в процентах от установившегося значения
предварительно задается в процентах от установившегося значения  , где нет определенных требований – принимают
, где нет определенных требований – принимают  .
.
3.  – перерегулирование – максимальное отклонение от установившегося значения, выраженное в относительных единицах или процентах
– перерегулирование – максимальное отклонение от установившегося значения, выраженное в относительных единицах или процентах
 или
или  (13)
(13)
Обычно требования по перерегулированию составляют  , иногда к качеству процессов может быть предъявлено требование
, иногда к качеству процессов может быть предъявлено требование  , на пример в системах позиционирования манипуляторов промышленных роботов.
, на пример в системах позиционирования манипуляторов промышленных роботов.
4.  – частота колебаний
– частота колебаний
 (14)
(14)
где  – период колебаний для колебательных процессов.
– период колебаний для колебательных процессов.
5.  – это число полных колебаний, которое имеет
– это число полных колебаний, которое имеет  или
или  за время регулирования . Этот параметр определяется как число выбросов, для которых
за время регулирования . Этот параметр определяется как число выбросов, для которых
 (15)
(15)
Обычные требования по числу колебаний  , в некоторых системах накладывают ограничение на колебательность
, в некоторых системах накладывают ограничение на колебательность  , на пример, в системах с существенным люфтом в механических передачах.
, на пример, в системах с существенным люфтом в механических передачах.
6.  – время достижения первого максимума.
– время достижения первого максимума.
7.  – время нарастания переходного процесса, время от начала переходного процесса до момента первого пересечения графиком линии установившегося значения.
– время нарастания переходного процесса, время от начала переходного процесса до момента первого пересечения графиком линии установившегося значения.
8.  – декремент затухания, равный отношению модулей двух смежных перерегулирований
– декремент затухания, равный отношению модулей двух смежных перерегулирований
9.  . (16)
. (16)






