Билет
1)
Изображение САУ в виде совокупности однонаправленных типовых звеньев с указанием связей между ними и внешней средой называется структурной схемой САУ (точнее, алгоритмической структурной схемой или просто структурой САУ), которая является графической интерпретацией описания математической модели САУ операторными функциями передачи (ОФП). Данный способ составляет сущность структурного метода представления, расчетов и исследования САУ различной физической природы, который дает наглядное представление о взаимосвязи элементов, звеньев и частей САУ и позволяет оценивать основные свойства переходных и установившихся процессов в САУ [1, 2, 6].
 На структурных схемах САУ (рис. 1.4.1) каждое звено обозначается прямоугольником, в котором записывается ОФП звена или её обозначение. Входные воздействия обозначаются стрелками, направленными в звено, выходные величины — стрелками, направленными из звена. Сумматоры обозначаются кружком, в который направлены стрелки суммируемых величин (вычитаемые величины обозначаются с минусом около стрелки), а результирующая величина обозначается стрелкой, выходящей из кружка. В однонаправленных звеньях отсутствует влияние выходной величины на входное воздействие. Устройства САУ, в которых имеется обратная связь, представляются в структурной схеме контуром с обратной связью. Например, на рис. 1.4.1 контур с обратной связью состоит из звена W2(p) прямой связи, звена W5(p) отрицательной обратной связи и сумматора, в котором сигнал x8(p)отрицательной обратной связиуменьшает входное воздействие x3(p) на звено W2(p)до значения x4(p). Структурная схема составляется по функциональной схеме САУ с учётом математического описания процессов управления, происходящих в звеньях САУ.
На структурных схемах САУ (рис. 1.4.1) каждое звено обозначается прямоугольником, в котором записывается ОФП звена или её обозначение. Входные воздействия обозначаются стрелками, направленными в звено, выходные величины — стрелками, направленными из звена. Сумматоры обозначаются кружком, в который направлены стрелки суммируемых величин (вычитаемые величины обозначаются с минусом около стрелки), а результирующая величина обозначается стрелкой, выходящей из кружка. В однонаправленных звеньях отсутствует влияние выходной величины на входное воздействие. Устройства САУ, в которых имеется обратная связь, представляются в структурной схеме контуром с обратной связью. Например, на рис. 1.4.1 контур с обратной связью состоит из звена W2(p) прямой связи, звена W5(p) отрицательной обратной связи и сумматора, в котором сигнал x8(p)отрицательной обратной связиуменьшает входное воздействие x3(p) на звено W2(p)до значения x4(p). Структурная схема составляется по функциональной схеме САУ с учётом математического описания процессов управления, происходящих в звеньях САУ.
Рис. 1.3.1 — Структурная схема САУ
Используются следующие основные правила эквивалентных преобразований структурных схем без изменений ОФП САУ.
1. Преобразование последовательно соединенных звеньев:

 (1.4.1)
(1.4.1)
2. Преобразование параллельно соединенных звеньев:
 (1.4.2)
(1.4.2)
3. Правило преобразования контура с обратной связью:
 (1.4.3)
(1.4.3)
4. Правила переноса узла разветвления сигнала:
а) по направлению распространения сигналов:

 (1.4.4)
(1.4.4)
б) против направления распространения сигналов:
 (1.4.5)
(1.4.5)
5. Правила переноса сумматора сигналов:
а) по направлению распространения сигналов:

 (1.4.6)
(1.4.6)
б) против направления распространения сигналов:

 (1.4.7)
(1.4.7)
6. Правила перестановка сумматоров в структурных схемах с перекрещивающимися обратными связями для выделения явно выраженных замкнутых контуров управления.
Перестановка сумматоров выполняется в два этапа. Например, в структурной схеме:
2.1.104 а) на первом этапе преобразования сумматоры совмещают в ближайшем к входу канале по правилу 5,б:
б) на втором этапе преобразования сумматоры переставляют местами в совмещенном канале так, чтобы образовались явно выраженные замкнутые контуры с обратной связью, которые преобразуются по правилу 3:
Пример 1.4.1. Для упрощения расчётов САУ применяют эквивалентные преобразования их структурных схем с заменой нетиповых элементов на типовые элементы, имеющие типовые временные и частотные характеристики. Например, ОФП двигателя постоянного тока с возбуждением от постоянных магнитов имеет не типовой вид
 ,
,
где  — выходная управляемая величина скорости двигателя; G(p) — задающее воздействие; 1/cе — коэффициент передачи;
— выходная управляемая величина скорости двигателя; G(p) — задающее воздействие; 1/cе — коэффициент передачи;  — электромеханическая постоянная времени двигателя;
— электромеханическая постоянная времени двигателя;  — электромагнитная постоянная времени цепи якоря двигателя.
— электромагнитная постоянная времени цепи якоря двигателя.
Заменим не типовую ОФП двигателя идентичной эквивалентной типовой расчетной ОФП с тем же коэффициентом передачи  с двумя последовательно соединенными апериодическими звеньями, с ОФП
с двумя последовательно соединенными апериодическими звеньями, с ОФП  При равенстве числителей идентичность эквивалентной замены определяется равенством их знаменателей
При равенстве числителей идентичность эквивалентной замены определяется равенством их знаменателей  , что требует равенства коэффициентов
, что требует равенства коэффициентов  Откуда, определив
Откуда, определив  из второго уравнения и подставив его значение в первое уравнение, получим квадратичное уравнение
из второго уравнения и подставив его значение в первое уравнение, получим квадратичное уравнение  , получим два решения
, получим два решения  . Полученные значения
. Полученные значения  и
и  являются постоянными времени двух апериодических звеньев эквивалентной расчетной передаточной функции, которая обеспечивает полную идентичность временных и частотных характеристик двигателя.
являются постоянными времени двух апериодических звеньев эквивалентной расчетной передаточной функции, которая обеспечивает полную идентичность временных и частотных характеристик двигателя.
Аналогично можно преобразовать структурную схему любой САУ при соблюдении условий эквивалентности преобразований.
2) ТИПОВЫЕ СХЕМЫ ПРИМЕНЕНИЯ ОПЕРАЦИОННЫХ УСИЛИТЕЛЕЙ, ИСПОЛЬЗУЕМЫЕ В КАЧЕСТВЕ ФУНКЦИОНАЛЬНЫХ ЭЛЕМЕНТОВ РЕЛЕ ЗАЩИТЫ
В данном параграфе описывается работа отдельных элементарных звеньев, из которых собираются основные узлы реле защиты. Каждое звено предназначается для осуществления одной из частных операций, присущих данному узлу. В схеме звена может содержаться одна или несколько микросхем, благодаря которым такие звенья относят к активным и называют функциональными элементами.
Наряду с функциональными элементами в схемах реле защиты применяют также звенья, не содержащие интегральных микросхем. В отличие от функциональных элементов такие звенья называют пассивными.
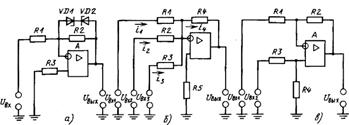
Рис. 8. Отдельные типовые схемы усилителей на реальных ОУ:
а - усилитель-ограничитель; б - сумматор на базе инвертирующего усилителя; б - дифференциальный усилитель
Остановимся на типовых схемах функциональных элементов, используемых в серийных реле защиты. Большинство из них заимствовано из схем, используемых в измерительной технике и промышленной автоматике.
К числу наиболее часто применяемых функциональных элементов следует в первую очередь отнести схемы усилителей, содержащих ОУ. Среди них можно указать уже известные из предыдущего параграфа схемы неинвертирующего и инвертирующего усилителей, изображенные на рис. 5, б, в. Широко применяют также повторители напряжения, показанные на рис. 5, а.
Наряду с ними довольно часто в реле защиты применяют усилители с ограничением уровня выходного напряжения, называемые сокращенно усилителями-ограничителями. Ограничения достигают за счет включения параллельно сопротивлению обратной связи двух встречно включенных стабилитронов (рис. 8, а). При подъеме выходного напряжения более UCT + 0,7 В сопротивление обратной связи шунтируется и рост их прекращается. Здесь UcT — напряжение пробоя стабилитрона, а 0,7 В - падение напряжения на стабилитроне в прямом, диодном направлении.
Часто используют схемы сумматоров напряжения на ОУ. Один из вариантов схемы сумматора с тремя входами, выполненный на основе инвертирующего усилителя, показан на рис. 8, б. На инвертирующий вход подаются складываемые напряжения через индивидуальные резисторы Rl —R3. Выходное напряжение будет пропорционально сумме входных напряжений. Сумматоры обладают малым собственным потреблением и позволяют поднять значение суммы напряжений до желаемого уровня. Они успешно используются в схемах формирователей сигналов, фильтров симметричных составляющих и для сравнения мгновенных или средних значений подаваемых напряжений.
К числу типовых относится также схема дифференциального усилителя, показанная на рис. 8, е.
Таким образом, данная схема обеспечивает усиление разности входных напряжений. Дифференциальный усилитель применяется также в качестве основы для получения схем различных сумматоров-вычитателей.
Рассмотрим еще несколько схем применения серийных ОУ.
Компараторы представляют собой схемы, обеспечивающие сравнение двух входных напряжений. Напряжение на выходе компаратора скачкообразно изменяется, когда одна из сравниваемых величин становится больше другой.
В реле защиты широко используются компараторы, в которых одной входной величиной является опорное напряжение заданного значения, а другой — напряжение, пропорциональное измеряемому напряжению или току, которое поступает от соответствующих датчиков.
Компараторы используются также в качестве нуль-индикаторов. В них один из входов компаратора заземляется и скачкообразное изменение выходного напряжения происходит при переходе измеряемого сигнала через нулевое значение. Одна из типовых схем компаратора показана на рис. 9, а. На вход 1 подается измеряемый сигнал, а на вход 2 — опорное напряжение. Пока измеряемое напряжение меньше опорного, на выходе ОУ держится максимальное выходное напряжение, совпадающее по знаку с опорным. Как только измеряемое напряжение станет больше опорного примерно на величину, равную свойственному данному ОУ напряжению суммирующей точки, выходное напряжение немедленно изменит свой знак на противоположный, сохранив максимальное значение. Диоды VD1 и VD2 защищают входы ОУ от повышенных значений дифференциального напряжения.
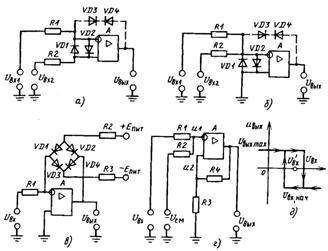
Рис. 9. Компаратор на реальных ОУ:
а - однопороговый для однополярных сигналов; б - однопороговый для разнополярных сигналов; в - двухпороговый компаратор; г - инвертирующий триггер Шмитта; д - передаточная характеристика триггера Шмитта
Если нужно ограничить выходное напряжение определенным уровнем, то в цепи обратной связи устанавливают два стабилитрона, включенных встречно.
Билет
1)
Идеальных дифференцирующих звеньев в природе не существует. Объект, обладающий дифференцирующими свойствами, описывается как реальное дифференцирующее звено
Ty¢(t) + y(t) = Tдx¢(t). (7.22)
Передаточная функция  . (7.23)
. (7.23)
Частотные характеристики представлены на рис. 7.6:
АФХ:  ; (7.24)
; (7.24)
АЧХ:  ; (7.25)
; (7.25)
ФЧХ: j = p/2 – arctgTw. (7.26)
Рис. 7.6. Частотные характеристики реального дифференцирующего звена:
а) АЧХ; б) ФЧХ; в) АФХ
У реального дифференцирующего звена верхний предел амплитудно-частотной характеристики ограничен величиной Тд/Т. Фазочастотная характеристика при увеличении частоты уменьшается от π/2 до нуля. АФХ представляет собой полуокружность диаметром Тд/Т.
Переходная функция  ; (7.27)
; (7.27)
весовая функция  . (7.28)
. (7.28)
На рис. 7.7показаны переходные характеристики реального дифференцирующего звена.
Рис. 7.7. Переходные характеристики реального дифференцирующего звена:
а) переходная функция; б) весовая функция
В силу инерции реальных звеньев изменение переходных характеристик происходит постепенно. Для того, чтобы приблизить свойства реального звена к свойствам идеального, необходимо одновременно увеличивать коэффициенты передачи Тд и уменьшать постоянную времени Т так, чтобы их произведение ТдТ оставалось постоянным.
2)
Билет
1) ИНТЕГРИРУЮЩАЯ ЦЕПЬ - электрическая цепь, в к-рой выходное напряжение Uвых(t) (или ток) пропорционально интегралу по времени от входного напряжения Uвх(t) (или тока):

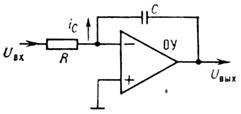
Рис. 1. Интегратор на операционном усилителе. В основе действия И. ц. лежит накопление зарядана конденсаторе с ёмкостью С под действием приложенного тока  или накопление магн. потока в катушке с индуктивностью L под действием приложенного напряжения
или накопление магн. потока в катушке с индуктивностью L под действием приложенного напряжения 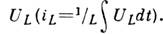 Преимущественно используются И. ц. с конденсатором. С наиб, точностью указанный принцип реализуется в интеграторе на операц. усилителе (ОУ) (рис. 1). Для идеального ОУ разность напряжений между его входами и входные токи равны нулю, поэтому ток, протекающий через сопротивление R, равен току заряда
Преимущественно используются И. ц. с конденсатором. С наиб, точностью указанный принцип реализуется в интеграторе на операц. усилителе (ОУ) (рис. 1). Для идеального ОУ разность напряжений между его входами и входные токи равны нулю, поэтому ток, протекающий через сопротивление R, равен току заряда
конденсатора С, а напряжение в точке их соединения равно нулю. В результате  Произведение RС=t, характеризующее скорость заряда конденсатора, наз. постоянной времени И. ц. Широко используется простейшая RC-И. ц. (рис. 2, а). В этой схеме ток заряда конденсатора определяется разностью входного и выходного напряжений [iC=(Uвх-Uвых)/R] поэтому интегрирование входного напряжения выполняется приближённо и тем точнее, чем меньше выходное напряжение по сравнению с входным. Последнее условие выполняется, если постоянная времени t много больше интервала времени, по к-рому происходит интегрирование. Для правильного интегрирования импульсного входного сигнала необходимо, чтобы t была много больше длительности импульса Т (рис. 3). Аналогичными свойствами обладает RL-И. ц., показанная на рис. 2, б, для к-рой постоянная времени равна L/R.
Произведение RС=t, характеризующее скорость заряда конденсатора, наз. постоянной времени И. ц. Широко используется простейшая RC-И. ц. (рис. 2, а). В этой схеме ток заряда конденсатора определяется разностью входного и выходного напряжений [iC=(Uвх-Uвых)/R] поэтому интегрирование входного напряжения выполняется приближённо и тем точнее, чем меньше выходное напряжение по сравнению с входным. Последнее условие выполняется, если постоянная времени t много больше интервала времени, по к-рому происходит интегрирование. Для правильного интегрирования импульсного входного сигнала необходимо, чтобы t была много больше длительности импульса Т (рис. 3). Аналогичными свойствами обладает RL-И. ц., показанная на рис. 2, б, для к-рой постоянная времени равна L/R.
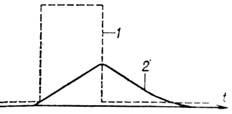
Рис. 3. 1 - входной прямоугольный импульс; 2 - выходное напряжение интегрирующей цепи при tдT.
И. ц. применяются для преобразования импульсов, модулированных по длительности, в импульсы, модулированные по амплитуде, для удлинения импульсов, получения пилообразного напряжения, выделения низкочастотных составляющих сигнала и т. п. И. ц. на операц. усилителях применяются в устройствах автоматики и аналоговых ЭВМ для реализации операции интегрирования.
2) По признаку учета зависимости объекта моделирования от времени различают статические и динамические характеристики систем, отражаемые в соответствующих моделях.
Статические модели (модели статики) отражают функцию системы — конкретное состояние реальной или проектируемой системы (своего рода его «мгновенную фотографию»)
Примеры. Закон Ома, описание показателей эффективности организацией в некоторый момент времени.
Динамические модели (модели динамики) отражают функционирование системы — процесс изменения состояний реальной или проектируемой системы. Они показывают различия между состояниями, последовательность смены состояний и развитие событий с течением времени.
Примеры. Описание процесса изменения спроса на какой-либо товар под влиянием рекламы, изменение температуры электроплиты при ее включении, описание процесса изменения показателей эффективности за некоторый период времени.
Отличие статических и динамических моделей заключено в учете времени: в статике его как бы не существует, а в динамике это основной элемент.
А) В узком смысле к статической характеристике системы можно отнести ее структуру. Однако нас чаще будут интересовать свойства системы по преобразованию ходов и выходов (т.е. функция системы) в установившемся режиме, когда отсутствуют изменения значений как входных, так и выходных переменных. Такие свойства определяются как статические характеристики.
Статическая характеристика — это зависимость между входной и выходной величинами в установившемся режиме. Статическая характеристика может быть представлена:
o математической моделью вида Y = F(X)
o графической моделью.
Б) Следующий шаг в исследовании систем состоит в том, чтобы понять и описать, как система «работает», что происходит с ней самой и с окружающей средой в ходе реализации поставленной цели. Для описаний функционирования системы используются динамические модели.
Для разных объектов и систем разработано большое количество динамических моделей, описывающих процессы с различной степенью детальности: от самого общего понятия динамики, движения вообще, до формальных математических моделей конкретных процессов типа уравнений движения в механике или волновых уравнений в теории поля. Свойства динамических систем определяет динамические характеристики.
Динамическая характеристика — это реакция системы на возмущение (зависимость изменения выходных переменных входных и от времени).
Динамическая характеристика может быть представлена:
o математической моделью в виде дифференциального уравнения (или уравнений) вида:

o математической моделью в виде решения дифференциального уравнения;
o графической моделью, состоящей из двух графиков: графика изменения возмущения во времени и графика реакции выхода на это возмущение — графической зависимости измене-ния выхода во времени.
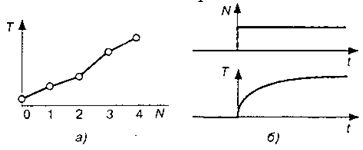
Рис. 1. Статическая (а) и динамическая (б) характеристики электроплиты
БИЛЕТ
Условие устойчивости САУ
Ответить на вопрос, будет ли устойчива данная система, можно, решив линеаризованноедифференциальное уравнение замкнутой системы:

Полное решение уравнения можно представить суммой вынужденной  и переходной
и переходной  составляющих:
составляющих:

Вынужденная составляющая, представляющая собой частное решение уравнения, является полезной составляющей управляемой величины и характеризует установившийся режим системы. Переходная составляющая является решением однородного дифференциального уравнения и характеризует переходный режим. Эта составляющая, как уже указывалось (см., например, рис. 1.3), по существу представляет ошибку системы в переходном режиме (отклонение системы от равновесного состояния,  и поэтому явлйется нежелательной составляющей управляемой величины. Очевидно, что система будет устойчивой, если переходная составляющая в ней с течением времени затухает, т. е.
и поэтому явлйется нежелательной составляющей управляемой величины. Очевидно, что система будет устойчивой, если переходная составляющая в ней с течением времени затухает, т. е.
Если же  при
при  не стремится к нулю, а возрастает или изменяется по закону незатухающих колебаний, то система неустойчива. Таким образом, для определения устойчивости необходимо выявить только характер изменения переходной составляющей решения, т. е. достаточно исследовать однородное уравнение замкнутой системы:
не стремится к нулю, а возрастает или изменяется по закону незатухающих колебаний, то система неустойчива. Таким образом, для определения устойчивости необходимо выявить только характер изменения переходной составляющей решения, т. е. достаточно исследовать однородное уравнение замкнутой системы:

Переходная составляющая (решение однородного уравнения) в случае некратных корней может быть представлена в виде следующей суммы:

где  — начальное значение
— начальное значение  компоненты переходной составляющей (постоянная интегрирования);
компоненты переходной составляющей (постоянная интегрирования);  корень характеристического уравнения однородного уравнения замкнутой системы (3.3):
корень характеристического уравнения однородного уравнения замкнутой системы (3.3):

Чтобы система была устойчивой, решение (3.4) должно удовлетворять требованию 

Рис. 3.2. Примеры расположения корней характеристического уравнения замкнутой системы накомплексной плоскости: а — устойчивой:  неустойчивой; в — находящейся на границе устойчивости.
неустойчивой; в — находящейся на границе устойчивости.
Из формулы (3.4) видно, что затухание  т. е. устойчивость системы, зависит от значения корней
т. е. устойчивость системы, зависит от значения корней  характеристического уравнения замкнутой системы (3.5). Пусть среди них будет
характеристического уравнения замкнутой системы (3.5). Пусть среди них будет  корней вещественных и
корней вещественных и  комплексно-сопряженных. Тогда решение (3.4) можно записать в виде:
комплексно-сопряженных. Тогда решение (3.4) можно записать в виде:

Выясним, как влияют значения корней на первую и вторую суммы формулы (3.7) при  Если все вещественные корни отрицательны
Если все вещественные корни отрицательны  то каждая составляющая первой суммы в формуле (3.7) представляет затухающую экспоненту и поэтому
то каждая составляющая первой суммы в формуле (3.7) представляет затухающую экспоненту и поэтому 
Если вещественные части а? всех комплексных корней отрицательны, то каждое слагаемое второй суммы (3.7) описывает затухающее колебание и поэтому

Отсюда можно сделать вывод, что если все вещественные корни и все вещественные части комплексных корней отрицательны (все корни находятся в левой полуплоскости комплексной плоскости корней, рис.  и система будет устойчива. Если хотя бы один из вещественных корней или вещественная часть пары комплексных корней окажется положительной (рис. 3.2, б), то система будет неустойчивой, так как соответствующие этим корням составляющие в решении
и система будет устойчива. Если хотя бы один из вещественных корней или вещественная часть пары комплексных корней окажется положительной (рис. 3.2, б), то система будет неустойчивой, так как соответствующие этим корням составляющие в решении  и
и  с течением времени будут неограниченно возрастать. Если вещественная часть хотя бы одного корня равна нулю, а вещественные части остальных корней отрицательны (рис. 3.2, в), то система находится на границе устойчивости.
с течением времени будут неограниченно возрастать. Если вещественная часть хотя бы одного корня равна нулю, а вещественные части остальных корней отрицательны (рис. 3.2, в), то система находится на границе устойчивости.
Таким образом, условием устойчивости системы автоматического управления является отрицательность вещественных частей всех корней ее характеристического уравнения (расположение всех корней характеристического уравнения в левой полуплоскости комплексной плоскости корней).
Корни характеристического уравнения замкнутой системы, как видно из (3.5), не зависят ни от вида задающего воздействия, ни от начальных условий, а определяются только соотношением коэффициентов  левой части уравнения системы, т. е. параметрами самой
левой части уравнения системы, т. е. параметрами самой
системы (постоянными времени звеньев, их коэффициентами усиления). Исследование устойчивости САУ может выполняться с целью определения как устойчивости системы при данных значениях ее параметров, так и некоторой области значений параметров, при которых система остается устойчивой.
Рассмотренное выше условие устойчивости для линейных систем является справедливым и для малых, и для больших возмущений. Для нелинейных систем, исследование которых производится с помощью линеаризованных уравнений, приведенное условие устойчивости справедливо для малых возмущений.
ПРЕОБРАЗОВАНИЕ ЛАПЛАСА
Преобразование Лапласа определяется соотношением
 (4.3.9)
(4.3.9)
Оно применимо к функциям, удовлетворяющим условию


и не имеющих особенностей при  . Преобразование Лапласа производится по переменной, определенной на полубесконечном интервале, чаще всего по времени. Установим основные свойства преобразования Лапласа.
. Преобразование Лапласа производится по переменной, определенной на полубесконечном интервале, чаще всего по времени. Установим основные свойства преобразования Лапласа.
- Преобразование Лапласа производной.
 (4.3.10)
(4.3.10)

 (4.3.11)
(4.3.11)
Билет 11
1. Нахождение переходной функции элемента
Полагаем входной сигнал четырехполюсника равным единичному ступенчатому воздействию e = 1 (t). Тогда его выходной сигнал будет равен переходной функции uc = h(t).
Учитывая сказанное в уравнении (2.44), приводим его к виду:
 1(t). (2.45)
1(t). (2.45)
Вынужденную составляющую переходной функции находим из уравнения (2.45), полагая в нем производную dh(t) /dt)= 0,
hв(t) = 1. (2.46)
Рис. 2.15. График переходной функции элемента
2
На рис. 5.1,а представлена схема линейного четырехполюсника в виде последовательной  -цепи с постоянной времени
-цепи с постоянной времени  . На входе цепи действует напряжение
. На входе цепи действует напряжение  , а выходное напряжение
, а выходное напряжение  может сниматься либо с сопротивления
может сниматься либо с сопротивления  , либо с конденсатора
, либо с конденсатора  . Определим зависимость выходного напряжения от входного для каждого из этих случаев. В соответствии со вторым законом Кирхгофа можно составить уравнение
. Определим зависимость выходного напряжения от входного для каждого из этих случаев. В соответствии со вторым законом Кирхгофа можно составить уравнение
 , или
, или  .
.
Выполним анализ данного уравнения при большом и малом значениях  .
.
1. Постоянная времени – малая величина.
Тогда  или
или  .
.
В этом случае выходное напряжение, снимаемое с сопротивления , будет равно  . Следовательно, если выходное напряжение снимать с сопротивления, то при малых значениях постоянной времени последовательная -цепь может дифференцировать входной сигнал.
. Следовательно, если выходное напряжение снимать с сопротивления, то при малых значениях постоянной времени последовательная -цепь может дифференцировать входной сигнал.
2. Постоянная времени – большая величина.
Тогда  или
или  .
.
В этом случае выходное напряжение, снимаемое с конденсатора , будет равно  . Следовательно, если выходное напряжение снимать с конденсатора, то при больших значениях постоянной времени последовательная -цепь может интегрировать входной сигнал.
. Следовательно, если выходное напряжение снимать с конденсатора, то при больших значениях постоянной времени последовательная -цепь может интегрировать входной сигнал.
Схема дифференцирующей цепи представлена на рис. 5.1,б, интегрирующей цепи – на рис. 5.1,в.
Рис. 5.1. Последовательная -цепь (а), дифференцирующая (б) и
интегрирующая (в) цепи.
5.3.1. Дифференцирующая цепь
Определим частотный коэффициент передачи  дифференцирующей цепи. Комплексная амплитуда тока в цепи определяется законом Ома
дифференцирующей цепи. Комплексная амплитуда тока в цепи определяется законом Ома
 .
.
Следовательно, комплексная амплитуда выходного напряжения равна
 .
.
Отсюда:
частотный коэффициент передачи  ; (5.2)
; (5.2)
амплитудно-частотная характеристика  ;
;
фазочастотнаяхарактеристика  .
.
Графики АЧХ и ФЧХ приведены на рис. 5.2,а.
Как следует из графика АЧХ, дифференцирующая цепь является фильтром верхних частот. Определим частоту среза  на уровне
на уровне  :
:
 ;
;  ;
;  .
.
Для приближения к точному дифференцированию необходимо, чтобы на всех частотах спектра входного сигнала соблюдалось неравенство  .Тогда
.Тогда  – частотная характеристика идеальной дифференцирующей цепи.
– частотная характеристика идеальной дифференцирующей цепи.
Рис. 5.2. АЧХ и ФЧХ дифференцирующей (а) и интегрирующей (б)
цепей
Билет 12
1.Структурные схемы – построенные на основе элементов, которые отличаются друг от друга передающими функциями или динамическими свойствами;
Задача свертывания – получение общей передающей функции системы за передающими функциями частей этой системы.
При свертывании используются следующие правила преобразования:
1. Замена последовательного включения звеньев на одно звено:

Рисунок 2.43 – Последовательное соединение звеньев
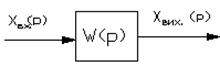
Рисунок 2.44 – Замена последовательного соединения
2. Если есть цепь из параллельно включенных звеньев то его можно заменить одним звеном с передающей функцией, которая равняется сумме передающих функций звеньев.
3. Если есть встречно-параллельное соединение звеньев то их также можно заменить одним звеном с передающей функцией, которая определяется по правилу встречно-параллельного соединения.
4. Сумматор (или внешнюю влияние  ) можно перенести с входа звена на его выход, если включить дополнительно такую же звено с такой же передающей функцией.
) можно перенести с входа звена на его выход, если включить дополнительно такую же звено с такой же передающей функцией.
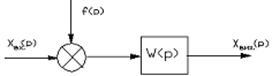
Рисунок 2.45 – Система к преобразованию
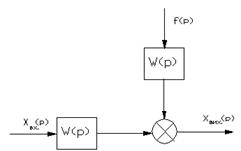
Рисунок 2.46 – Система после преобразования по этому правилу
5. Сумматор на выходе звена (или внешнюю влияние ) можно перенести с выхода звена на его вход, если включить дополнительно такую же звено, но с передающей функцией  .
.
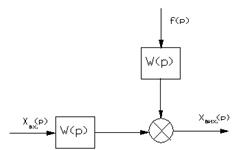
Рисунок 2.47 – Схема к преобразованию
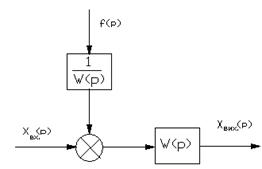
Рисунок 2.48 – Схема после преобразования
6. Узел с входа звена можно перенести на его выход дополнительно включивши звено с обратной функцией.
Рисунок 2.49 - Схема с узлом к преобразованию
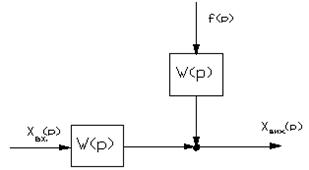
Рисунок 2.50 - Схема с узлом после преобразования
7. Узел можно перенести из выхода звена на вход, но при этом нужно включить такую же звено с такой же передающей функцией.
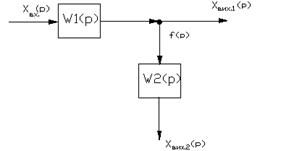
Рисунок 2.51 - Схема к преобразованию
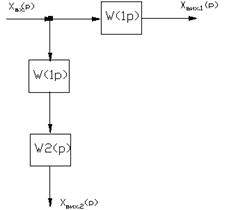
Рисунок 2.52 – Схема после преобразований согласно правилу 7
При переносе сумматора или узла обязательно появляется дополнительное звено. Нельзя переносить сумматор через узел или наоборот.
2. На рис. 5.1,а представлена схема линейного четырехполюсника в виде последовательной -цепи с постоянной времени . На входе цепи действует напряжение , а выходное напряжение может сниматься либо с сопротивления , либо с конденсатора . Определим зависимость выходного напряжения от входного для каждого из этих случаев. В соответствии со вторым законом Кирхгофа можно составить уравнение
, или .
Выполним анализ данного уравнения при большом и малом значениях .
1. Постоянная времени – малая величина.
Тогда или .
В этом случае выходное напряжение, снимаемое с сопротивления , будет равно . Следовательно, если выходное напряжение снимать с сопротивления, то при малых значениях постоянной времени последовательная -цепь может дифференцировать входной сигнал.
2. Постоянная времени – большая величина.
Тогда или .
В этом случае выходное напряжение, снимаемое с конденсатора , будет равно . Следовательно, если выходное напряжение снимать с конденсатора, то при больших значениях постоянной времени последовательная -цепь может интегрировать входной сигнал.
Схема дифференцирующей цепи представлена на рис. 5.1,б, интегрирующей цепи – на рис. 5.1,в.
Рис. 5.1. Последовательная -цепь (а), дифференцирующая (б) и
интегрирующая (в) цепи
5.3.2. Интегрирующая цепь
Определим частотный коэффициент передачи интегрирующей цепи. Если комплексная амплитуда тока в цепи равна
,
то комплексная амплитуда выходного напряжения равна
 .
.
Отсюда:
частотный коэффициент передачи  ; (5.3)
; (5.3)
амплитудно-частотная характеристика  ;
;
фазочастотнаяхарактеристика  .
.
Графики АЧХ и ФЧХ приведены на рис. 5.2,б.
Как следует из графика АЧХ, интегрирующая цепь является фильтром нижних частот. Частота среза также равна  .
.
Для приближения к точному интегрированию необходимо, чтобы на всех частотах спектра входного сигнала соблюдалось неравенство  .Тогда
.Тогда  – частотная характеристика идеальной интегрирующей цепи.
– частотная характеристика идеальной интегрирующей цепи.
Рис. 5.2. АЧХ и ФЧХ дифференцирующей (а) и интегрирующей (б)
цепей
Билет 15
1.
Рис. 2.3. Суммирующий усилитель
Пример расчета
Предположим, что схема (рис. 2.3) должна обеспечить суммирование трех входных напряжений. Действующее значение каждого из них может изменяться в пределах от 8 до 30 мВ. Действующее значение выходного сигнала при максимальном напряжении входных сигналов по всем трем каналам должно быть не меньше 1 В и не превышать 2 В.
Выходное напряжение  схемы определяется из соотношения
схемы определяется из соотношения
 . (2.2)
. (2.2)






