Некоторые ПЛК позволяют настраивать способ исполнения рабочего цикла:
• циклический – новый цикл начинается сразу по окончании последнего
цикла (рис. 2.9, а);
• периодический – программист задаёт минимальную длительность цикла ПЛК. Если последний цикл завершился раньше заданного времени, то начало нового цикла задерживается до тех пор, пока не пройдёт установленная длительность цикла (рис. 2.9, б).

Некоторые программируемые контроллеры поддерживают «параллельное» выполнение нескольких программ (многозадачный режим). При этом, поскольку одновременное выполнение нескольких программ (задач) на одном процессоре невозможно, имеется однозначно определённая структура приоритетов этих программ. Чаще всего такой многозадачный режим реализуется следующим образом.
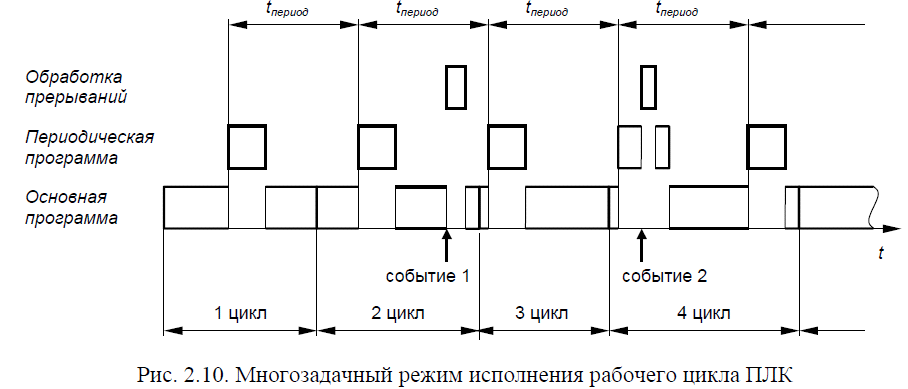
Основная программа с низшим приоритетом исполняется циклически или периодически. Периодическая программа с более высоким приоритетом исполняется периодически, прерывая основную. При этом длительность исполнения периодической программы должна быть в несколько раз меньше чем длительность периода. Кроме того, имеется ряд программ с более высокими приоритетами, которые вызываются при возникновении какого-то события (прерывания) (рис. 2.10). Событиями могут быть как аппаратные сигналы (например, неисправность модуля ввода-вывода), так и программные (срабатывание сторожевого таймера при превышении максимальной длительности рабочего цикла контроллера).
Устройство (Варианты построения) ПЛК [Петров]
Аппаратно ПЛК является вычислительной машиной. Поэтому архитектура его процессорного ядра практически не отличается от архитектуры компьютера. Отличия заключены в составе периферийного оборудования, отсутствуют видеоплата, средства ручного ввода и дисковая подсистема. Вместо них ПЛК имеет модули входов и выходов.
Конструктивно контроллеры подразделяют на моноблочные, модульные и распределенные. Моноблочные, или одноплатные, ПЛК имеют фиксированный набор входов-выходов. В модульных контроллерах (рис. 1.7) модули входов-выходов устанавливаются в разном составе и количестве в зависимости от требуемой конфигурации. Так достигается минимальная аппаратная избыточность. В распределенных системах модули или даже отдельные входы-выходы, образующие единую систему управления, могут быть разнесены на значительные расстояния.
Характерным для современных контроллеров является использование многопроцессорных решений, В этом случае модули ввода-вывода имеют собственные микропроцессоры, выполняющие необходимую предварительную обработку данных. Модуль центрального процессора имеет выделенную скоростную магистраль данных для работы с памятью и отдельную магистраль (сеть) для общения с модулями ввода-вывода.
Еще одним вариантом построения ПЛК является мезонинная технология. Все силовые цепи, устройства защиты контроллера выполняются на несущей плате. Процессорное ядро контроллера, включающее систему исполнения, выполнено на отдельной сменной (мезонинной) плате. В результате появляется возможность составлять несколько комбинаций процессорного ядра и разных силовых плат без необходимости корректировки программного обеспечения. При необходимости процессор можно заменить даже в готовой системе.
Системное и прикладное программное обеспечение [Петров]
Системное программное обеспечение (СПО) непосредственно контролирует аппаратные средства ПЛК. СПО отвечает за тестирование и индикацию работы памяти, источника питания, модулей ввода-вывода и интерфейсов, таймеров и часов реального времени. Система исполнения кода прикладной программы является составной частью СПО. Система исполнения включает драйверы модулей ввода-вывода, загрузчик кода программ пользователя, интерпретатор команд и отладочный монитор. Код СПО расположен в ПЗУ и может быть изменен только изготовителем ПЛК.
Код прикладное программы размещается в энергонезависимой памяти, чаще всего это электрически перепрограммируемые микросхемы. Изменение кода прикладной программы выполняется пользователем ПЛК при помощи системы программирования и может быть выполнено многократно.
Распределённый ввод/вывод
Количество модулей расширения, подключаемых на одну шину с модулем центрального процессора, ограничено электрическими характеристиками системной шины. Для того чтобы подключить большее количество модулей используются технологии удалённого и распределённого ввода/вывода (такую терминологию использует компания Schneider Electric). Дополнительные модули ввода вывода подключаются к специальному модулю – станции расширения, которая опрашивает подключенные к ней модули ввода-вывода и обменивается информацией с модулем центрального процессора по последовательному интерфейсу (рис. 2.11). При этом модули, подключаемые на одну шину с модулем центрального процессора, называются локальным вводом-выводом.
Главная особенность удалённого ввода-вывода − использование закрытого стандарта для организации интерфейса между ПЛК и станцией расширения. Поэтому его характеристики могут весьма сильно отличаться для разных фирм производителей. Например, контроллеры Siemens серии S7-300 используют пару интерфейсных модулей (ИМ, рис. 2.11) со встроенным кабелем связи длиной до четырёх метров. Платформа Quantum компании Schneider Electric предлагает использование специальных модулей для организации удалённого ввода-вывода на расстоянии до 800 метров (Remote I/O). Платформа Premium компании Schneider Electric вообще не использует интерфейсные модули. Для того чтобы организовать удалённый ввод-вывод предлагается использовать специальные расширяемые рейки с разъёмами расширения шины, кабель (до 12 метров) и терминаторы для нормализации волновых сопротивлений на концах шины.

Для организации удалённого ввода-вывода некоторые производители предлагают использовать интерфейс программирования ПЛК, встроенный в модуль центрального процессора.
При распределённом вводе-выводе для организации связи используется стандартная промышленная сеть. В этом случае в качестве станции расширения выступает коммуникационный контроллер (КК, рис. 2.11), который обеспечивает поддержку протокола промышленной сети.






