Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...

Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...



 .
.


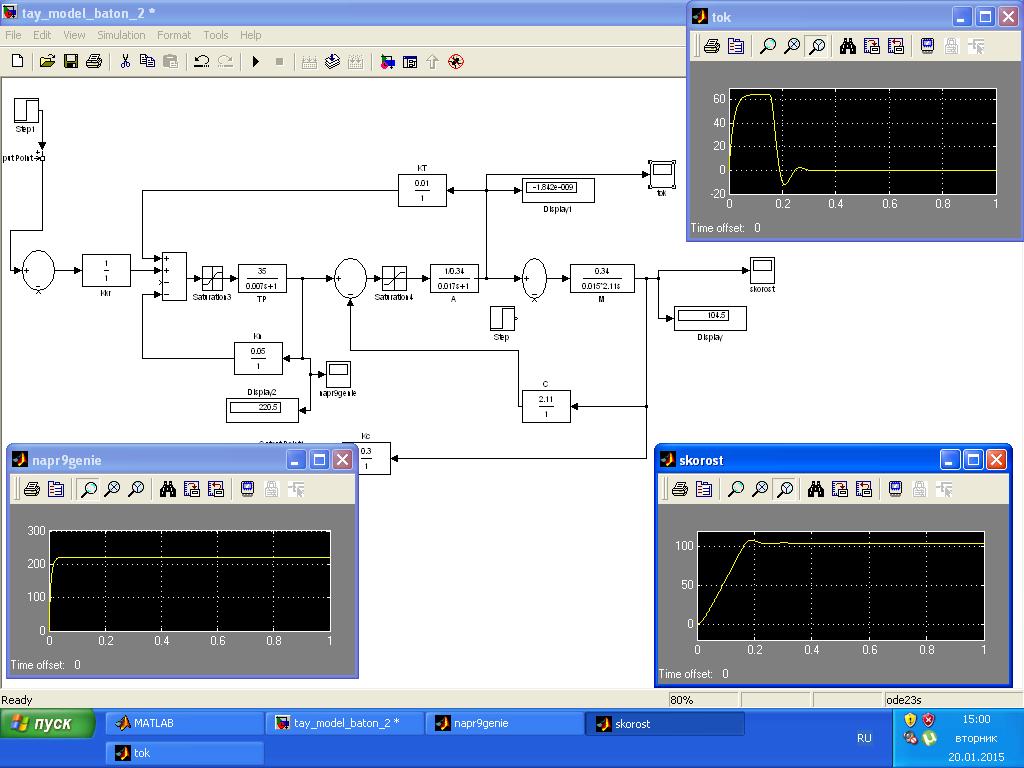
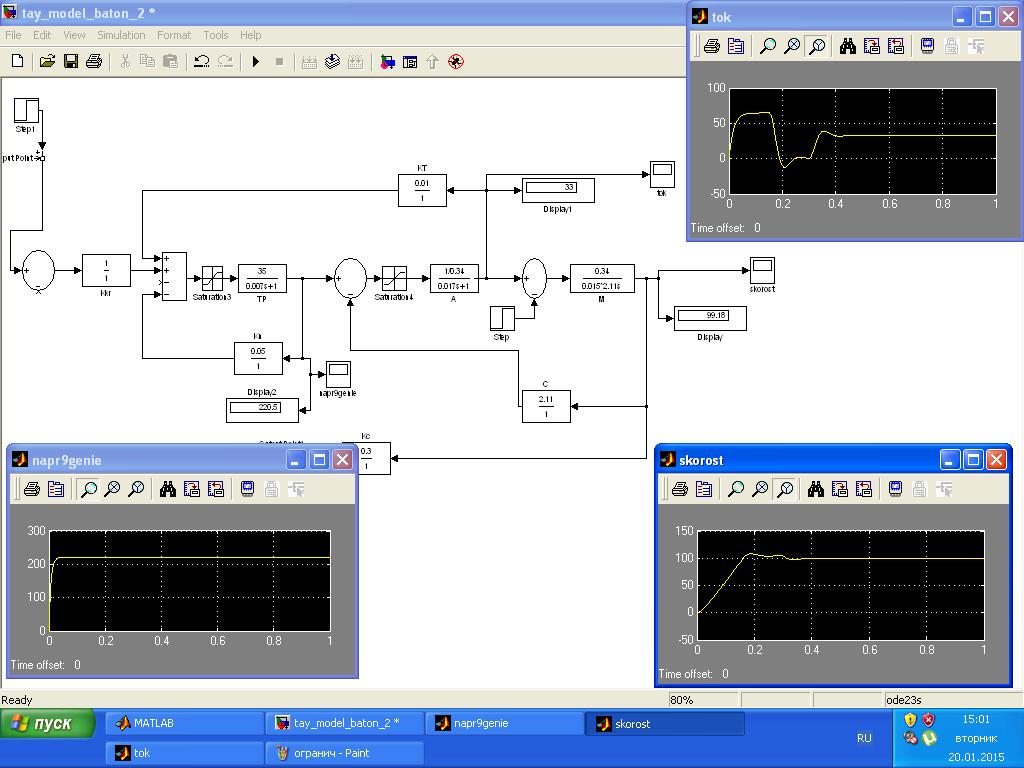

 - выполняется:
- выполняется:
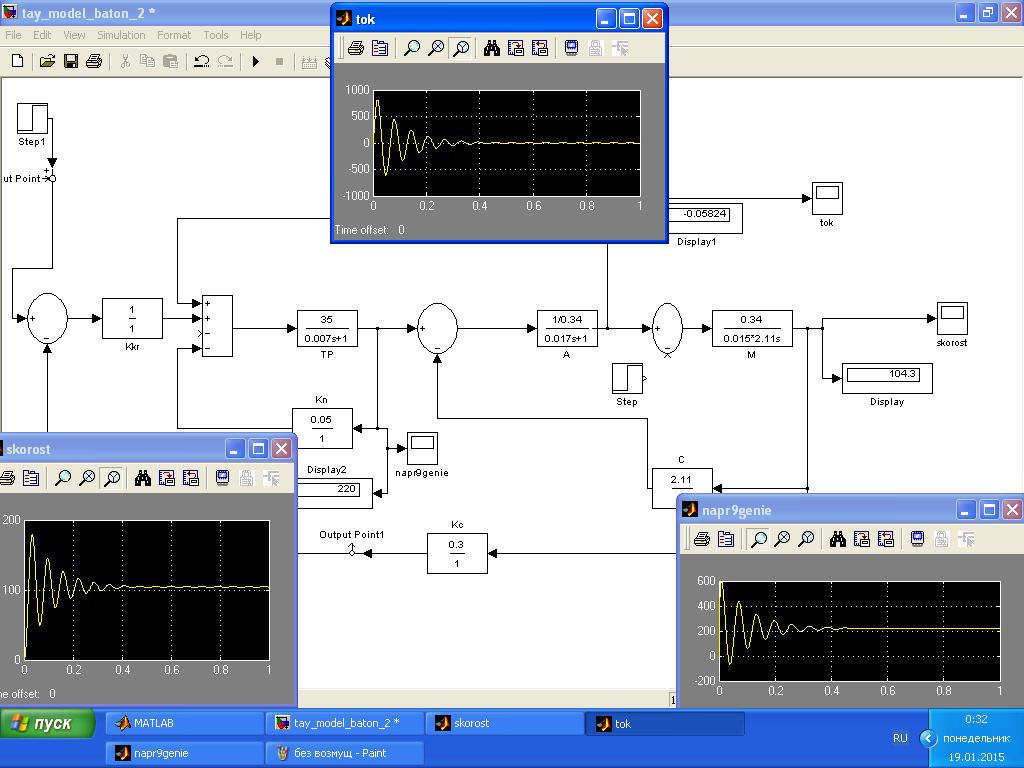
 - не укладываемся в допустимые пределы;
- не укладываемся в допустимые пределы; ;
;