7.8.3.1 Подтверждение совпадения позиций остановки для каждой поездки
Руководствуясь значениями настройки в формировании кривой, относительного и интегрального инкремента, которые рассмотрены в Части III, следует достигнуть того, чтобы положение лифта при остановке на промежуточном этаже оставалась всегда одинаковым, вне зависимости от того, движется лифт вверх или вниз, с отклонением ≤±2-3мм между поездками.
7.8.3.2 Настройка шунтов в зоне открытия дверей
□ Останавливайте лифт на каждой остановке и измеряйте разницу △S между порогами («+» если порог кабины выше, «-»если порог кабины ниже).
□ Настройте положение шунтов для каждого этажа, передвигайте шунт вниз на величину △S, если △S>0, и вверх, если △S<0.
□ После окончания настройки шунтов, повторите самообучение.
□ Проверьте уровень порогов еще раз. При неудовлетворительном результате, повторите шаги с 1 по 3.
7.8.3.3 Настройка параметров в Меню
Если положения точной остановки на одних и тех же этажах различаются в зависимости от направления движения вверх и вниз, например, выше при движении вверх и ниже при движении вниз или ниже при движении вверх и выше при движении вниз, произведите настройку F56 и F57 в меню параметров. По умолчанию установлено значение 50мм, уменьшите его если уровень остановки выше при движении вверх и ниже при движении вниз и наоборот увеличьте если уровень остановки ниже при движении вверх и выше при движении вниз. Настроенное значение должно составлять 50% от значения разницы между порогами. Например, если разница в уровне остановки, когда выше при движении вверх и ниже при движении вниз, составляет 20 мм, уменьшите параметр на 10 мм
☆ Требования к установке датчиков точной остановки
Когда порог кабины и порог этажа абсолютно совпадают, верхний край шунта точной остановки находится выше нижнего датчика точной остановки, а нижний край находится ниже верхнего датчика остановки примерно на 10 мм, что облегчает настройку комфортного передвижения и точность выравнивания. Стандартная длина шунта точной остановки составляет 220 мм, все пластины имеют одинаковую длину с погрешностью НЕ больше 3 мм (см. схему ниже).
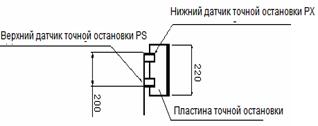
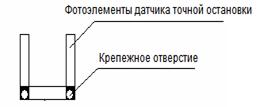
Схема 7.8 Установка датчиков точной остановки
⑴ Использование магнитных датчиков точной остановки
①Убедитесь, что шунт точной остановки входит достаточно глубоко в датчики точной остановки, чтобы датчики могли работать эффективно и надёжно.
②Шунт точной остановки должен быть установлен в строго вертикальном положении, чтобы избежать ситуации, когда одни датчики работают, а другие нет, что скажется на нормальной работе лифта.
⑵ Использование датчиков точной остановки на фотоэлементах (последовательный порт STEP обеспечивает эффективную работу с низковольтными сигналами)
Для лучшей работы датчиков, рекомендуется соблюдать условия, описанные ниже.
① Удалите краску на экране вокруг монтажного отверстия, чтобы улучшить соединение с землей металлической оплетки кабеля с помощью винтов, кронштейнов к верху кабины. Если заземляющий провод закрепляется под фиксированной гайкой на корпусе фотоэлемента с удаленной краской, необходима особенная осторожность в использовании.
②Рекомендуется подсоединять к клеммной коробке в верхней части кабины при помощи экранированного кабеля с землей.
③Для уменьшения помех используйте фотодатчики с нормально открытыми контактами.
④В случае если один из датчиков вспыхивает во время работы, нарушая движение или точные остановки, это может объясняться помехами. Между COM и PS (или PX) поместите конденсатор 0.1μF63V, как показано на схеме.
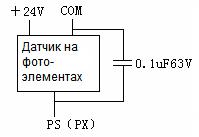

Схема 7.9 Подключение конденсатора
Внимание: датчики точной остановки на фотоэлементах легко повредить. Их повторная замена нецелесообразна и может увеличить затраты. Но при соблюдении 4 вышеописанных пунктов, вероятность повреждения значительно уменьшиться.
☆ Обратите внимание при установке датчиков на следующее:
①Шунты точной остановки должны входить в датчики на 2/3, отрегулируйте шунты на всех этажах и точно выровняйте их по вертикали.
②После того, как выравнивание успешно закончено, проверьте, концы шунта должны выходить за датчик на длину 10-30 мм (см. схему ниже).
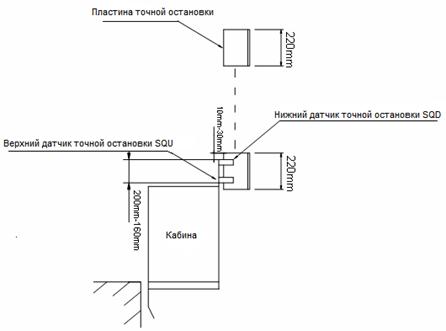
Схема 7.10 Установка шунтов точной остановки
③Все шунты точной остановки каждого этажа должны быть выровнены относительно датчиков для улучшения точности при остановке кабины после записи этажей.
④Пустите лифт вверх и вниз на каждом этаже на рабочей скорости, фиксируя разницу между порогами. Если при движении вверх порог кабины выступает выше, фиксируется выход за уровень, если ниже, остановка до уровня; если при движении вниз порог кабины выступает ниже, фиксируется выход за уровень, если выше остановка до уровня.
⑤На характеристики точной остановки могут также влиять помехи в энкодере или его плохое качество. При проведении электрической разводки кабели или линии энкодера следует располагать в отдельном коробе от силовых линий.
☆ Обратите внимание при настройке точной остановки
□ Рекомендовано следующее расстояние между центрами индукционных датчиков точной остановки:
Без повторного выравнивания с открытыми дверями: расстояние между датчиками должно быть на 60 мм меньше, чем длина шунта, концы пластины выступают на 30 мм с двух сторон.
С повторным выравниванием с открытыми дверями: расстояние между датчиками должно быть на 40 мм меньше, чем длина пластины, концы пластины выступают на 20 мм с двух сторон.
□ Установка параметра F21 (задержка для датчика точной остановки), 6 мм для скорости 1.75 м/с и ниже, 10 мм для 2.0-3.0 м/с; установка параметров F56 и F57, F56=50, F57=50, точная регулировка для каждого этажа 20.
□ Настройка PI в инвертере для устранения превышения частоты.
□ Запишите данные точной останови для каждого этажа, «+» если порог выше и «-»если порог ниже.
При движении вверх считайте этажи от F2 до FN, записывая разницу между остановками следующим образом Up(2), Up(3), … Up(N),
При движении вниз считайте этажи от F(N-1) до F1, записывая разницу между точными остановками следующим образом Dn(N-1), … Dn(2), Dn(1),
Посчитайте соответствующую разницу между точными остановками,
X(2) = (Up(2) + Dn(2)) / 2;
X(3) = (Up(3) + Dn(3)) / 2;
X(4) = (Up(4) + Dn(4)) / 2;
…
…
X(N-1) = (Up(N-1) + Dn(N-1)) / 2;
X(2) ~ X(N-1) Если разница больше 10 мм, следует урегулировать положение шунта, положительное значение X(n) означает, что шунт расположен слишком высоко, и наоборот. Если разница менее 10 мм, настройка точной остановки прошла успешно.
□ При переустановке положения шунта, проведите самообучение лифта и запишите данные точных остановок еще раз.
При движении вверх считайте этажи от F2 до FN, записывая разницу между остановками следующим образом Up(2), Up(3), … Up(N),
При движении вниз считайте этажи от F(N-1) до F1, записывая разницу между точными остановками следующим образом Dn(N-1), … Dn(2), Dn(1),
1) Посчитайте соответствующую разницу между точными остановками,
X(2) = (Up(2) + Dn(2)) / 2;
X(3) = (Up(3) + Dn(3)) / 2;
X(4) = (Up(4) + Dn(4)) / 2;
...
X(N-1) = (Up(N-1) + Dn(N-1)) / 2;
2) Посчитайте точное значение разницы в среднем XUp, XDn, исключая конечные остановки.
Среднее значение разницы при движении вверх,
XUp = (Up(2) + Up(3) +... + Up(N-1)) / (N-2);
Среднее значение разницы при движении вниз,
XDn = (Dn(2) + Dn(3) +... + Dn(N-1)) / (N-2);
Промежуточное положение, pX = (XUp - XDn) / 2;
Запишите полученные результаты для XUp, XDn и pX со знаками «+/-».
3) Настройте параметры F56, F57:
F56 = 50 - pX;
F57 = 50 - pX;
4) Выполните точную подстройку точных остановок и запишите данные точной регулировки для Fn как L(n):
L(2) = 20 - X(2)
L(3) = 20 - X(3)
...
L(n) = 20 - X(n)
...
L(N-1) = 20 - X(N-1)
В конце посчитайте значение точной подстройки точной остановки для крайних остановок.
☆ Причины неправильной настройки точной остановки:
Следующие причины являются кратким резюме вышесказанного. Пожалуйста, ознакомьтесь еще раз:
1. При неверной установке следующих параметров, настройка точной остановки не может быть выполнена успешно.
Проверьте F21 (настройка датчика точной остановки будет отложена). Значение, установленное по умолчанию изготовителем: 6 мм. Данное значение подходит для лифта с фотоэлектронным датчиком точной остановки и скорость ниже 1.75 м/с.
Для высокоскоростных лифтов с фотоэлектронными датчиками точной остановки (3.0 м/с и выше) может быть установлено значение 10 мм.
Для высокоскоростных лифтов с фотоэлектронными датчиками точной остановки (5.0 м/с и выше) может быть установлено значение 16 мм.
F56 – настройка точной остановки при движении вверх. Значение по умолчанию: 50 мм.
F57 – настройка точной остановки при движении вниз. Значение по умолчанию: 50 мм.
Точная подстройка остановки: точная подстройка остановки для каждого этажа установлена изготовителем по умолчанию 20 мм.
2. Помехи в энкодере
1) Если линия энкодера не заземлена или сигнальная линия и силовая линия не разделены, экранированная линия энкодера воспринимает помехи силовой линии. Эта проблема сильнее сказывается при использовании синхронного электродвигателя. Сигнал энкодера Sin/cos или другого энкодера представляет собой малый аналоговый сигнал, и он наиболее восприимчив к помехам. Это приводит к хаотичным неточным остановкам.
2) Метод проверки: после самообучения запишите данные высоты шахты лифта (от нижней остановки до верхней), затем перезапустите самообучение и еще раз запишите данные. Сравните эти данные. Ошибка положения соответствующего этажа не более 3 мм. (обычно они идентичны или различаются +- 1мм). Если ошибка более 3 мм, считается, что присутствуют помехи энкодера или проскальзывание канатоведущего шкива.
3) Решения:
a) Убедитесь, что мотор соединяется со станцией управления заземляющим проводом.
b) Убедитесь, что экранированная линия PG платы от энкодера до преобразователя заземлена на конце преобразователя. Проверьте наличие соединения между контактами кабеля; затем проверьте заземление обоих концов экранированной линии.
Осторожно: уделите особое внимание промежуточному соединению энкодера Sincos синхронного мотора!!
c) Убедитесь, что линия энкодера от PG платы до линии энкодера главной платы была заземлена.
d) Убедитесь, что линия энкодера достаточно удалена от силовой линии и линии тормозного резистора (если они находятся в одном желобе для прокладки проводов, линия энкодера должна быть проложена в гибкой трубе)
e) Убедитесь в соединении между 0V PG платы и 0V основной платы. (Особенно когда выход А+, А-, В+, В- используется в multi-segment speeds)
f) Проверьте, смещается ли промежуточное соединение энкодера.
3. Проскальзывание стального каната на канатоведущем шкиве
1) Эффект: Уровень остановки не соответствует точной остановке, когда лифт работает без загрузки или с полной загрузкой, или когда верхняя и нижняя точная остановка непостоянна. Уровень остановки соответствует точной остановке при половине загрузки кабины.
2) Проверка: на любом этаже (например, на третьем этаже) отметьте мелом контрольную линию между канатоведущим шкивом и канатом. Вернитесь на третий этаж после прохождения одного круга (с третьего этажа на четвертый, с четвертого этажа на третий). Проверьте, есть ли ошибочное расстояние между контрольной линией канатоведущего шкива и каната (желательно менее 5 мм); это единственная ошибка расстояния при проскальзывании. Пройдите еще два раза с нулевой загрузкой и с полной загрузкой. Устраните ошибку более 5 мм.
3) Решения:
a) До и после декорирования вес кабины может варьироваться до 200кг. Завершено ли декорирование? Верен ли текущий коэффициент баланса? Если мы не можем подтвердить, что загрузка кабины составляет ровно половину, считать это за ошибку?
b) Работа лифта на высокой скорости не может решить проблему проскальзывания, рекомендуются следующие два подхода:
1. Установите энкодер со стороны регулятора скорости, чтобы обеспечить обратную связь главной платы.
2. Компенсируйте проскальзывание при помощи регулировки подхода лифта. Установите F24=2 (аналогично с подходом) или F24=0 (многоскоростное управление)
4. Отклонение регулятора скорости
DC регулятор скорости или синхронный мотор без передачи могут переходить предел по причине отсутствия редуктора, особенно DC регулятор Mentor II. В нем используется энкодер для обратной связи и мягкая характеристика. Рекомендуется использовать guns генераторы. Не применяйте нулевой уровень диапазона торможения перед остановкой, и затем другой уровень, держите нулевой уровень скорости диапазона торможения для функционирования.
1) Метод проверки: проверьте диапазон торможения лифта во время остановки. Если обнаружилось, что скорость лифта снизилась до нуля, затем начинается прибавление скорости и поддержка скорости, это показывает, что у лифта есть переходить предела.
2) Решение: настройте PI параметры петли управления скоростью, чтобы устранить переход предела.
5. При использовании магнитных датчиков, задайте достаточную глубину захода шунта. Проверьте, заходит ли шунт точной остановки на каждом этаже до красной линии датчика, и шунты на каждом этаже установлены без наклона.
6. Когда длина шунта точной остановки непостоянна, шунт на втором этаже представляет собой базовую длину для сравнения. Длина шунта на других этажах должна совпадать с длиной на втором этаже. В противном случае это может привести к проблемам.
7. После настройки шунтов не требуется повтора самообучения.
Установка других функций
При необходимости вы можете активировать или установить другие функции при помощи настройки параметра F (смотрите Параграф 2.8 с детальным описанием функций и способа установки)
Схема ввода в эксплуатацию