На основании анализа, проведенного в предыдущей главе, минимальным значением постоянной времени элемент а электромеханической системы регулирования можно принять значение Т=10 мс. Отдельные электромеханические преобразователи (маломощные электромагниты устройств «сопло-заслонка», высокочастотные электродинамические преобразователи) также могут иметь постоянные времени порядка единиц миллисекунд
Большинство элементов электромеханических систем имеет передаточную функцию типа апериодического или колебательного звена с частотой, определяемой как частота среза (для апериодического звена) или резонансной частотой (для колебательного звена).
Диапазон измерений по данным литературы [1,52] должен превышать частоту среза не менее чем на декаду. Для апериодического звена частота среза fs=l/2/71/Т, где Т - постоянная времени звена. Значение частоты среза для Т 1 мс - fs--1 /2/зт/10'3 = 150 Гц.
Для колебательного звена можно принять частоту среза равной f = 0.7*fo, где f0 - первая собственная частота колебательного звена.
Таким образом, верхняя граница измерения устройства для определения динамических характеристик исполнительных элементов электромеханических систем может быть принята равной 1500...2000 Гц.
Максимальные значения постоянных времени элементов электромеханических систем достигают 10...50с, то есть эти элементы имеют частоту среза Ј,=1/2/я/50 = 3*10'’ Гц. Исходя из этого, а также и рекомендаций [1,52], нижняя граница частотого диапазона о устройства должна иметь значение не более 10" Гц.
Однако, в соответствии с [2,40] непосредственные измерения частотных
характеристик целесообразно проводить на частотах не ниже 0,5 1 Гц. На более низких
частотах рекомендуется использовать вычисления частотной характеристики по экспериментально определенной переходной характеристике элемента [8,41]. Это позволяет сократить время измерения. Частота условного раздела, при которой время прямого измерения частотных характеристик приблизительно равно времени вычисления частотных характеристик по переходной характеристике, находится в пределах 1...5 Гц [10]. Поэтому измерение динамических характеристик элементов, характерные частоты которых находятся вблизи указанного выше диапазона, можно проводить любым из этих методов.
Таким образом, представляется очевидно необходимым организовать в устройстве определения частотных характеристик две возможности подачи возмущающего сигнала:
- синусоидального сигнала с частотой, изменяемой в диапазоне 0,2...2000 Гц для непосредственного определения частотных характеристик; ступенчатого сигнала для определения переходных характеристик.
Измерительная часть устройства также должна реализовывать два режима определения частотных характеристик:
- непосредственное измерения модуля и фазы передаточной функции при возбуждении элемента синусоидальным сигналом;
вычисление модуля и фазы передаточной функции по измеренной переходной характеристике объекта.
Отдельного рассмотрения требует вопрос о применении спектрального частотного метода для определения передаточных функций элементов электромеханических систем путем возбуждения элемента сигналом белого шума и определения спектра выходного сигнала с последующим определением частотных характеристик. На этом принципе работает большинство промышленных анализаторов (например, типа 2032 и 2034 фирмы Bruel&Kjaer и аналогичные им анализаторы других фирм). Применение такого метода исторически вытекало из необходимости решения задач акустических измерений и было механически перенесено на измерения характеристик электрических и электромеханических устройств.
В литературе, посвященной измерению частотных характеристик [2,10,40,48], высказывается мнение, что этот метод создает затруднения при определении дифференциальных коэффициентов передачи элементов с нелинейными проходными характеристиками. Однако анализа этих затруднений и точности измерений в литературе не приводится.
Анализ характеристик электромеханических элементов, проведенный в разделе 1, показывает, что многие электромеханические элементов обладают нелинейными характеристиками. Поэтому вопрос о погрешностях определения дифференциальных коэффициентов передачи таких элементов является весьма существенным.
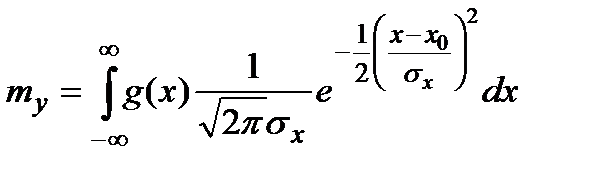
Преобразование одномерного шумового сигнала у= x(t) при прохождении через нелинейный элемент в общем случае по [3] определяется двумя выражениями:

 где g(x) - нелинейная функция;
где g(x) - нелинейная функция;
 - дифференциальная плотность распределения вероятности входного сигнала;
- дифференциальная плотность распределения вероятности входного сигнала;
 - математическое ожидание выходного сигнала;
- математическое ожидание выходного сигнала;
а у - среднеквадратичное отклонение.
Учитывая, что для “белого” шума:
можно записать общие выражения для определения математического ожидания и дисперсии выходного шумового сигнала:
 (2.1)
(2.1)
Эти выражения для достаточно произвольных значений g(x) и  не приводятся к
не приводятся к
элементарным функциям. Очевидно, поэтому в литературе приводятся результаты аналитических вычислений такого рода только для функций g(x), представленных в виде кусочно-линейных аппроксимаций [3,34], либо для функции рх, представленной в виде равномерного распределения.
Большинство нелинейных электромеханических элементов имеют проходную характеристику, близкую к квадратичной или кубической (рис.2.1).
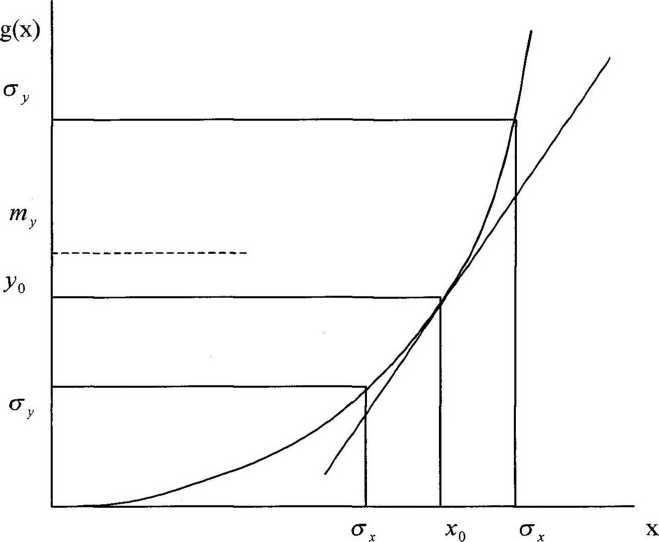
Рис.2.1. Проходная характеристика нелинейного элемента
Для этого случая выражения (2.1) приобретают вид:
 ,n=2,3 (2.2)
,n=2,3 (2.2)
В случае возбуждения такого нелинейного элемента синусоидальным сигналом выражение для выходного сигнала элемента с квадратичной и кубической проходной характеристикой имеют следующий вид:
 (n=2)
(n=2)

Где


В этих выражениях можно выделить следующие составляющие: величина /гау
соответствует постоянной составляющей выходного сигнала, включающей и продетектированное значение входного сигнала; величина представляет собой
линеаризованную составляющую выходного сигнала с частотой возбуждения, характеризующую дифференциальный коэффициент передачи элемента в точке х0, а
величина у2 характеризует погрешность определения дифференциального коэффициента передачи. Строго говоря, в погрешность дифференциального коэффициента передачи должнавключаться также продетектированная постоянная составляющая входного сигнала, однако этого можно избежать программными или схемотехническими методами.
Для численного определения значений ту и оу был разработан алгоритм и
программа, приведенная в Приложении 4 работы
На рис.2.2 приведены зависимости погрешности определения динамического коэффициента передачи элементов с квадратичной и кубической проходными
характеристиками в зависимости от отношения  и для случаев возбуждения
и для случаев возбуждения
синусоидальным сигналом и сигналом белого шума
Рис.2.2. Погрешность определения коэффициента передачи
Эти характеристики позволяют сделать следующие выводы
- погрешность определения дифференциального коэффициента передачи как для шумового, так и для синусоидального сигнала возбуждения практически монотонно
возрастает с увеличением отношения  ;
;
-погрешности измерения дифференциального коэффициента передачи для элемента с квадратичной проходной характеристикой практически одинаковы при равных значениях 
-погрешность измерения дифференциального коэффициента передачи для элемента с кубической проходной характеристикой оказывается существенно выше при возбуждении шумовым сигналом, чем при возбуждении синусоидальным сигналом при равных  .
.
Можно считать, что для характеристик со степенями не выше квадратичной, определение коэффициента передачи путем возбуждения синусоидальным и шумовым сигналом является равноценным с точки зрения погрешности измерения. Это, на первый взгляд, противоречит устойчивому мнению, что погрешности при определении характеристик нелинейных элементов при возбуждении шумовым сигналом оказываются большими.
Это мнение, очевидно, объясняется следующим обстоятельством. При выводе выражений (2), среднеквадратичное значение шумового сигнала в заданной полосе измерения две декады принималось равным среднеквадратичному значению детерминированного синусоидального сигнала. Такое допущение предполагает, фактически, равную мощность детерминированного синусоидального сигнала и шумового сигнала в полосе измерений (две декады). Мощность шумового сигнала по [40] определяется, как
 со
со
где 
Для сигнала белого шума это выражение можно записать, как
Цифровой анализатор, построенный на базе преобразований Фурье, измеряет амплитудное или среднеквадратичное значение шумового сигнала в элементарной полосе анализа. Общая мощность шумового процесса в полосе анализа определяется по [40] выражением:

где G=const - спектральная плотность мощности Dw - общий диапазон измерений.
Таким образом, величина среднеквадратичного значения белого шума в элементарной полосе анализа
Так как  где n-число элементарных частотных полос анализа
где n-число элементарных частотных полос анализа
таким образом, 
Например, для числа элементарных полос N=100 в общей полосе анализа, среднеквадратичное значение сигнала, приходящееся на элементарную полосу, будет в десять раз меньше. Это не имеет значения при идеальных условиях измерения, однако, при ограниченной чувствительности анализатора, потребуется определенное увеличение входного шумового сигнала для обеспечения его нормальной работы. Однако при этом возрастут и погрешности измерения сигнала, определяемые выражением (2.3).
Очевидно, что указанное явление и объясняет существующее мнение о большей погрешности измерения проходных нелинейных характеристик элементов при шумовом возмущающем сигнале. Для определения динамических характеристик элементов, работающих в системах с высокими уровнями шумов, статистический метод возможно даст более достоверные результаты. Поэтому в измерительной части проектируемого устройства предусмотрена возможность использования данного метода (при наличии генератора «белого шума»).
Следующим важным вопросом является определение требуемого диапазона автоматического сканирования частоты в процессе измерения частотной характеристики. В разных источниках приводятся различные требования по ширине этого диапазона, который колеблется от одной декады [34] до трех декад [10]. Измерительные приборы фирмы В&К работают в полосе частот шириной в три декады, однако эти приборы предназначались первоначально и, в большинстве случаев, используются для измерения частотных характеристик звуковоспроизводящей аппаратуры в стандартной для этой аппаратуры полосе частот [5]. В примерах [8] основные особенности передаточных функций анализируются в основном в полосе частот - две декады.
Стандартные функциональные генераторы с внешним управлением частотой имеют диапазон сканирования частоты 1...100, то есть две декады. Такой же диапазон имеют приборы, построенные на специализированных микросхемах (например, МАХ 038 фирмы MAXIM). По данным фирм, расширение диапазона сканирования частоты более двух декад приводит к возможности появления паразитной частотной модуляции выходного сигнала из- за наличия помех в цепях управления.
Исходя из сказанного, можно считать приемлемой ширину диапазона автоматического сканирования частоты функционального генератора устройства в две декады при общей ширине частотного диапазона функционального генератора и измерителя в пределах 0,2...2000 Гц, то есть четыре декады.
2.2. Определение требуемого диапазона изменения входных и выходных сигналов элементов электромеханических систем регулирования
Анализ реальных частотных характеристик звеньев раздела 1 позволяет сделать некоторые заключения о требуемом общем диапазоне измерения их выходных сигналов.
Крутизна частотных характеристик апериодического звена составляет в высокочастотной области 20 дБ/дек, поэтому при измерении в автоматическом режиме необходимо иметь динамический диапазон измерителя не менее 20 дБ. Колебательные звенья, используемые в электромеханических САР, как правило, имеют коэффициент динамичности не более 20 дБ [25]. При измерении передаточных характеристик звеньев типа интегрирующих в диапазоне изменения частот в две декады необходимо иметь динамический диапазон измерителя в 40 дБ. Аналоговые измерительные приборы анализаторов 1022 фирмы RFT обладают динамическим диапазоном 30-40 дБ, а самописцы уровня фирмы В&К до 50 дБ [51].
Такое измерение возможно при использовании в измерительном устройстве АЦП с разрядностью не менее 10 бит (при максимальной погрешности порядка 1 дБ). Погрешность измерения А (при учете только погрешности квантования) составляет 1 единицу младшего разряда АЦП. Относительная погрешность измерения составляет:
где  - минимальное значение измеряемого сигнала в единицах АЦП;
- минимальное значение измеряемого сигнала в единицах АЦП;
где  - максимальное значение измеряемого сигнала в единицах АЦП
- максимальное значение измеряемого сигнала в единицах АЦП
S - динамический диапазон изменения сигнала.
В случае применения 10-битного АЦП и диапазона изменения сигнала 40 дБ, погрешность измерения составит:

В действительности погрешность измерения отношения двух величин при указанных выше условиях может достигать 2 дБ. Поэтому для уменьшения этой погрешности в программе должно быть предусмотрено усреднение результатов по нескольким измерениям, или применение АЦП более высокой разрядности. В разрабатываемом устройстве был принят первый способ.
Поэтому желательным динамическим диапазоном для проектируемого устройства можно считать диапазон порядка 40 дБ, который обеспечивается достаточно доступными
АЦП с разрядностью 10-12 бит. Получение общего диапазона измерения 80-100 дБ, который принят в качестве типового в большинстве промышленных анализаторов, должно обеспечиваться аттенюаторами измерительного блока или датчиковых систем.
Поэтому, желательным динамическим диапазоном для проектируемого устройства можно считать диапазон порядка 40 дБ, который обеспечивается достаточно доступными АЦП с разрядностью 10...12 бит. Получение общего диапазона измерения 80...100 дБ, который принят в качестве типового в большинстве промышленных анализаторов, должно обеспечиваться аттенюаторами измерительного блока или датчиковых систем.
2.2. Определение номинальных значений сигналов измерительной части
устройства
В соответствии с принятым в разделе 1 принципом блочно-агрегатного построения устройства, реальные уровни входных и выходных сигналов испытуемого элемента должны приводиться к стандартному уровню, единому для всех датчиков и усилительных устройств. В соответствии с мировыми стандартами DIN, ISO и других, наиболее часто применяемыми уровнями входных и выходных сигналов измерительных цепей и цепей автоматики являются значения -10...+10 и 0...10 В. Сигналы такого уровня хорошо совместимы с устройствами на стандартных операционных усилителях в измерительных и логико-вычислительных подсистемах.
Стандартные измерительные приборы фирм В&К и HP также имеют входные сигналы с уровнями до ±10 В и управляющие сигналы 0...10 В. С целью максимальной унификации разрабатываемого устройства с наиболее распространенными промышленными приборами, в нем также целесообразно иметь входные и выходные уровни управляющих и измерительных сигналов, указанные выше.
2.3. Определение состава измерительной системы и принципов определения частотных характеристик
Полный состав системы, построенный в соответствии с принципами, сформулированными в разделах 1 и 2, представлен на рис.2.3.
Основой устройства является измерительный блок, состоящий из микропроцессорного ядра и функционального генератора. Управление частотой генератора, микропроцессорным ядром и отображение результатов измерения производится внешней ПК. Поскольку основная обработка результатов измерения производится микропроцессором, в качестве ПК может использоваться машина класса РС486 и выше, имеющая стандартные интерфейсы CENTRONICS и RS-232. Для отображения результатов и управления генератором возможно использование самописца (например, 2305, 2306, 2307 фирмы В&К или аналогичного), имеющего выход напряжения развертки по оси X. Для этого в состав микропроцессорного ядра включен ЦАП, а функциональный генератор имеет вход для управления частотой сигналом постоянного тока 0...10 В.
В качестве датчиков, преобразующих выходные (и/или входные) сигналы испытуемого элемента в сигналы, воспринимаемым измерительным блоком, используются стандартные датчики со вторичными преобразователями. Достаточно широкая номенклатура таких датчиков и преобразователей фирм В&К, RFT, PRODERA, Kistler, НВМ и др. [1,34,49,51], а также отечественных производителей “Виброприбор”, КЗПА и др. находится в пользовании на предприятиях. Вторичные преобразователи большинства этих датчиков имеют стандартный выходной сигнал 0.... 10 В.
Усилители, необходимые для согласования выходного сигнала функционального генератора со входным сигналом испытуемого элемента также выпускаются многими фирмами, как отечественными, так и зарубежными в широком наборе типоразмеров от 10 до 600 Вт (и более) для работы на нагрузке 1...6000 Ом (2706, 2707, 2708, 2712, 2713 фирмы В&К; LV50, LV100 фирм RFT, УМ50, ТУ 100, ТУ600) [51]
Блок процессора
Функциональный генератор
ВХОДЫ УПРАВЛЕНИЯ ЧАСТОТОЙ
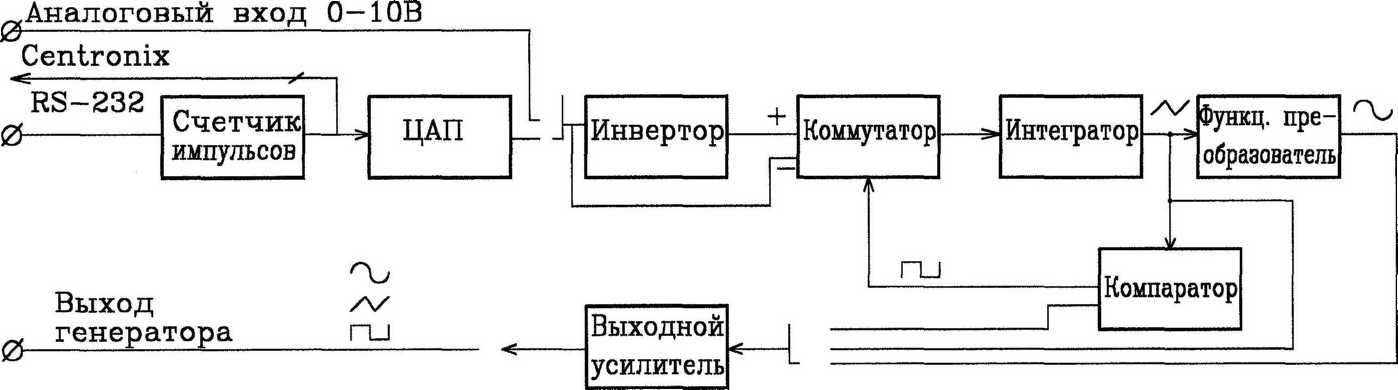
Рис.2.3 Функциональная схема измерительного блока
Учитывая сказанное выше, можно считать, что как датчики, так и усилительные устройства, входящие в состав полной системы измерения частотных характеристик не требуют специальной разработки, поскольку номенклатура промышленных устройств такого рода достаточно широка.
2.2. Предварительное рассмотрение методов определения частотных
характеристик
Как уже указывалось, определение частотных характеристик САР с помощью разрабатываемого устройства, предполагается производить двумя методами:
прямое измерение частотных характеристик предполагает возбуждение элемента по входу синусоидальным сигналом функционального генератора, запись значений входных и выходных сигналов элемента, микропроцессорным блоком, вычисление точной частоты сигнала возмущения, амплитуд и фаз выходных сигналов по отношению ко входным и определение коэффициентов четырехполюсника, описывающих передаточные функции элементов;
- косвенное определение частотных характеристик производится путем измерения сигналов отклика на выходах элемента при подаче на его вход ступенчатого сигнала и последующей обработки этих сигналов по одному из стандартных методов [8].
В обоих случаях вычисления проводятся в микропроцессорном блоке, то есть при выборе той или иной методики определения частотных характеристик изменяются только программа обработки результатов измерений, загруженная в память микропроцессорного блока, и вид сигналов генератора (без изменения общего состава системы). Методика определения передаточной функции конкретного элемента должна разрабатываться в зависимости от вида входных и выходных сигналов, передаточной функции, нагрузки и т.п. и для элемента, выбранного в качестве примера, будет приведена в разделе 3.
Исходя из сформулированных в разделе 1 общих принципов построения системы измерения и рассмотрения ее технических особенностей, проведенных в настоящем разделе, можно считать, что целью работы должна являться разработка измерительного блока системы, включающего в себя блоки функционального генератора и процессора, и осуществляющего генерацию сигналов возбуждения элемента и обработку измерительного сигнала (рис.2.3). Остальные составляющие части системы являются сменными и будут выбираться из ряда существующих промышленных устройств в зависимости от вида конкретного испытуемого элемента. Поэтому ниже приводятся предварительные технические требования на измерительный блок устройства, определенные по результатам анализа по разделам 1 и 2.
2.6. Технические требования на измерительный блок
2.6.1. Измерительный блок устройства определения частотных характеристик должен иметь в своем составе функциональный генератор для выработки сигналов возбуждения испытуемого элемента и микропроцессорный блок, осуществляющий прием и обработку сигналов по входам и выходам испытуемого элемента.
2.6.2. Общий диапазон изменения частоты
синусоидального сигнала генератора, Гц 0,2...2000
2.6.3. Виды выходного сигнала генератора синусоидальный сигнал; ступенчатый сигнал
2.6.4. Диапазон изменения частоты генератора
при управлении внешним сигналом, декад 2
Сигналы управления частотой генератора:
TTL-сигнал по порту CENTRONICS;
TTL-сигнал по порту RS-232;
В генераторе необходимо предусмотреть также ручное управление частотой.
2.6.5. Предел регулирования амплитуды выходного напряжения генератора при синусоидальном сигнале. В 0... 10
2.6.6. Пределы регулирования выходного
напряжения генератора при ступенчатом сигнале, В 0... ± 10 В
2.6.7. Пределы регулирования постоянной составляющей
выходного сигнала генератора, В -10...+10
2.6.8. Сопротивление нагрузки выхода генератора,
кОм, не менее 10
2.6.9. Количество входных аналоговых сигналов
микропроцессорного блока 4
2.6.10.Номинальные значения входных сигналов
микропроцессорного блока, В ±10
2.6.11.Динамический диапазон измерения модуля коэффициента передачи, при погрешности
не более 1 Дб, децибел 40
2.6.12.Общий диапазон измерения входного сигнала
(ступенями по 20 Дб), децибел 80
2.6.13.Пределы измерения углов между входными
сигналами микропроцессорного блока, эл.град. -180...+180
2.6.14.Формат выходного сигнала микропроцессорного
блока для трансляции данных на ПК по стандарту RS-232
Приведенные выше технические требования определяют характеристики измерительной части устройств для измерения частотных характеристик большинства элементов электромеханических САР.
Для разработки устройства в целом, предназначенного для определения частотных характеристик группы конкретных объектов необходимо, как уже упоминалось выше, выбрать датчиковые и усилительные блоки устройства и разработать методики измерения.
Определение группы элементов электромеханических САР, для которых производится разработка конкретного устройства, производится в разделе 3
Выводы:
1) При построения системы (устройства) определения динамических характеристик основной целью является разработка измерительного блока системы, генерирующего и воспринимающего нормированные электрические сигналы. Г енерирование реальных физических воздействий на объект измерений и обработка его выходных сигналов должны производиться специализированными устройствами с нормированными входными (усилители, преобразователи) и выходными (датчики) сигналами.
. Устройство должно иметь возможность как прямого измерения частотных характеристик элемента, так и косвенного определения этих характеристик путем измерения переходных характеристик элементов. В конкретном случае выбор метода измерения должен производиться на программном уровне
3. МЕТОДИКИ И СХЕМОТЕХНИЧЕСКИЕ РЕШЕНИЯ ДЛЯ ОПРЕДЕЛЕНИЯ ЧАСТОТНЫХ ХАРАКТЕРИСТИК ХАРАКТЕРНОЙ
ГРУППЫ ЭЛЕМЕНТОВ САР
3.1. Выбор характерной группы элементов САР для построения системы измерения
При построении полной системы измерения представляется целесообразным выбрать в качестве объекта исследования элемент электромеханической системы регулирования, для которого экспериментальное определение частотных характеристик представляет собой наиболее сложную задачу. В этом случае, такую систему можно без затруднений приспособить для определения характеристик других элементов, позволяющих применение более простых методик измерения. При этом при переходе к измерениям характеристик более простых элементов, в системе потребуется изменить лишь согласование уровней входных и выходных сигналов элемента и системы измерения, что обеспечивается либо переключениями пределов измерения, либо заменой датчиков и согласующих усилителей (при изменении вида входных и выходных сигналов).
Анализ характеристик элементов электромеханических систем регулирования, проведенный в разделе 1, позволяет считать, что определение частотных характеристик оказывается наиболее сложным для элементов типа электромагнитов, работающих в электромеханических системах регулирования в качестве аналогового исполнительного органа. Такими элементами являются, например, электромагнитные подшипники или электромагниты транспорта на электромагнитной подушке. Эти элементы обладают рядом особенностей, практически не встречающихся в совокупности в других группах элементов:
- проходные характеристики электромагнитов описываются полными уравнениями четырехполюсника [21];
- типичные значения постоянных времени таких электромагнитов находятся в пределах от единиц секунд до десятков миллисекунд, то есть для определения частотных характеристик может потребоваться как прямое измерение, так и расчет по экспериментальной проходной характеристике;
- типичные величины усилий, развиваемых такими электромагнитами, находятся в пределах от десятков до десятков тысяч ньютонов, а соответствующие значения токов электромагнитов - от десятков миллиампер до десятков ампер. Это приводит к необходимости применения датчиков, рассчитанных на различные диапазоны измерения как для согласования входных, так и выходных сигналов электромагнита со входами измерительной системы;
- проходная характеристика (ток-усилие) является существенно нелинейной (квадратичная с зоной насыщения), что может потребовать определения дифференциальных характеристик;
- электромагнит (в совокупности с якорем) обладает внутренней положительной обратной связью по положению (т.е. отрицательной жесткостью), ухудшающей устойчивость системы, в которой он работает и затрудняющей измерение соответствующих характеристик.
- Разработка принципов схемотехнической реализации измерений
С учетом перечисленных выше особенностей, система измерений частотных характеристик электромагнитов представлена на рис.3.1 для случая испытания упорного электромагнитного подшипника [18].
Испытуемый электромагнит состоит из собственно электромагнита 1, установленного на жестком фундаменте и якоря 2 (ротора), установленного на тот же фундамент через упругий элемент 3 и датчики усилий 4. На якоре установлены акселерометры 5 для измерения совместно с интегрирующими усилителями, входящими в состав устройства

Рис 3.1 схема испытательной установки
измерения частотных характеристик, перемещения якоря. Для устранения ошибок из-за возможной несимметрии или несоосности установки ротора и статора, используются группы из трех датчиков силы и трех акселерометров, сигналы которых суммируются в каждой из групп. Применение пьезоэлектрических датчиков и усилителей заряда позволяют суммировать сигналы датчиков непосредственным соединением их выходных цепей.
Для измерения усилий используются датчики типа 8001 или 8002 фирмы В&К или серии 9250 фирмы Kistler в сочетании со вторичными преобразователями типа 2635 фирмы В&К. Это позволяет осуществить надежное измерение усилий от единиц Ньютонов до десятков тысяч ньютонов [1,10,51,52].
Измерение перемещений якоря производится акселерометрами пьезоэлектрического типа 4370, 4371 фирмы В&К с теми же типами вторичных преобразователей, позволяющих производить однократное или двукратное интегрирование сигнала ускорения для получения сигналов скорости и перемещения. Такое построение системы измерений позволяет производить надежное измерение перемещений и скоростей в диапазоне 0,2...2000 Гц.
Применение пьезоэлектрических датчиков указанных типов для измерения усилия и перемещений обуславливается двумя особенностями. Во-первых, такие датчики могут применяться с одними и теми же усилителями-преобразователями, которые имеют к тому же внутренние схемы интегрирования для преобразования сигналов. Во-вторых, датчики, например, фирмы В&К, и соответствующие усилители-преобразователи имеют очень точную калибровку в рабочем диапазоне частот, что позволяет в большинстве случаев их использование в измерительных системах без дополнительной калибровки. Благодаря этим особенностям эти датчики в настоящее время являются как бы неофициальным промышленным стандартом для виброметрических измерений. В качестве другого такого же стандарта можно назвать серию токовихревых датчиков фирмы Bentley-Nevada. Однако эти датчики и многочисленные их видоизменения обладают одним существенным недостатком, а именно они оказываются чувствительными к первоначальной установке зазора между датчиком и измеряемой поверхностью. Несмотря на частичное устранение этого недостатка в современных системах таких датчиков, при их применении требуется их первоначальная калибровка. Кроме того, эти датчики оказываются чувствительными к материалу поверхности, по которой производится измерение. Различные типы контактных датчиков (реостатные, индуктивно-трансформаторные с подвижным штоком) как правило, плохо работают на частотах порядка сотен герц и выше.
Питание обмотки электромагнита производится через усилители (серии 2700 фирмы В&К, LV50 фирмы RFT или соответствующим усилителем постоянного тока любого другого типа. Для согласования сигнала тока электромагнита со входом измерительного устройства используются датчики тока, из которых наиболее подходящими являются датчики серии HY фирмы LEM, имеющие номинальные значения токов в пределах 5...25 А и выходной сигнал напряжения, пропорциональный току с номинальным значением 4 В. При измерениях параметров маломощных электромеханических элементов для тех же целей возможно также применение шунтов. Однако в случае испытания достаточно мощных электромагнитов (на десятки ампер с питанием от ШИМ усилителей) применение гальванически развязанных датчиков тока является необходимым.
Согласование значений входного напряжения электромагнита со входом измерительного блока осуществляется с помощью делителя напряжения.
Такое построение системы позволяет производить одновременные измерения и запись в память как двух входных (ток и напряжение), так и двух выходных (усилие, перемещение) сигналов испытуемого электромагнита. Это дает возможность выбрать любую тройку сигналов для построения матрицы передаточной функции электромагнита.
Измерение входного сигнала испытуемого элемента (вместо прямого его задания) необходимо, поскольку применяемые для питания электромагнита усилители мощности указанных выше типов (как и большинство других), не имеют калиброванных коэффициентов усиления, что не дает возможности точно задать величину входного сигнала электромагнита.
Следует отметить, что при измерении по схеме рис.3.1 а будет определяться передаточная функция электромагнита, нагруженного на жесткость упругого элемента, на котором установлен ротор и жесткость датчиков усилия. Однако, для датчиков пьезоэлектрического типа жесткость существенно выше, чем для датчиков усилия других типов. При этом выбором жесткости упругого элемента для испытуемого электромагнита может быть создан режим, соответствующий “холостому ходу” четырехполюсника (перемещение Z=0) или режим “короткого замыкания” (усилие F=0).
Пример использования системы для тарировки и проверки датчиков ускорения и усилия приведены на рис.3.1б [51,52].
При тарировке датчиков ускорения проверяемый датчик устанавливается на столе электродинамического возбудителя (ЭДВ) в непосредственной близости с образцовым датчиком. Возбуждение ЭДВ производится от измерительной системы через соответствующий усилитель. Микропроцессорный блок измерительной части устройства осуществляет сравнение сигналов образцового и проверяемого (рабочего) датчика и вычисляет параметры градуировочной кривой рабочего датчика
 где
где
 и
и  - амплитуды сигналов рабочего и образцового датчика соответственно. Фазовая погрешность ф рабочего датчика определяется аналогично.
- амплитуды сигналов рабочего и образцового датчика соответственно. Фазовая погрешность ф рабочего датчика определяется аналогично.
При тарировке датчиков усилия рабочий датчик устанавливается и возбуждается также, как и в предыдущем случае, но с нагружением дополнительной массой т. Измерительное устройство считывает сигналы ускорения с образцового датчика ускорения и сигнал усилия с рабочего датчика усилия и вычисляет градуировочную кривую рабочего датчика
 где
где
 - сигнал рабочего датчика усилия;
- сигнал рабочего датчика усилия;
 - сигнал образцового датчика ускорения
- сигнал образцового датчика ускорения
3.2. Методика определения передаточных функций выбранной группы элементов

3.2. Схема пассивного четырехполюсника
В соответствии с [21], передаточные функции электромагнитного преобразователя представляют собой уравнение несимметричного пассивного четырехполюсника (рис.3.2). В соответствие с [21], уравнения (17) описывают передаточную функцию электромагнита (без учета насыщения, рассеяния, вихревых токов). Учет этих особенностей приводит к усложнению выражений для коэффициентов этих уравнений, однако их общая структура остается неизменной.







