ПРОГРАММНОЙ ПОДДЕРЖКИ КОМПЬЮТЕРНОЙ ОБРАБОТКИ ИНФОРМАЦИИ
4.1. Микропроцессорный блок 81
4.2. Функциональный генератор 85
4.3. Общая структура приборно-программного модуля для
измерения частотных характеристик 91
4.4. Разработка интерфейса и программ для управления
внешним задающим генератором 94
4.5. Разработка программы первичной обработки данных 97
4.6. Разработка программы для определения модулей и фаз
передаточных функций. 100
5. ЭКСПЕРИМЕНТАЛЬНО-РАСЧЕТНЫЕ ИССЛЕДОВАНИЯ 103
5.1. Испытания устройства для определения частотных характеристик 103 5.2.Определение передаточных функций электромагнита со сплошным
магнитопроводом 105
5.2.1. П-образный электромагнит 111
5.2.2. Кольцевой электромагнит высокочастотного
электродвигателя 118
5.2.3. Кольцевой электромагнит Nuovo-Pignone 127
ЗАКЛЮЧЕНИЕ 137
СПИСОК ЛИТЕРАТУРЫ 139
ПРИЛОЖЕНИЕ 1. Технические требования и принципиальные
схемы блока процессора 143
ПРИЛОЖЕНИЕ 2. Описание принципиальной схемы и расчет
элементов генератора 160
ПРИЛОЖЕНИЕ 3. Исходные тексты программ определения
частотных характеристик. 170
ПРИЛОЖЕНИЕ 4. Исходный текст программы расчета погрешностей определения дифференциальных коэффициентов передачи 186
ВВЕДЕНИЕ
В настоящее время существует значительное многообразие систем регулирования, включающих электромеханические элементы (электродвигатели, электромагниты, датчики электрических и неэлектрических величин, релейные регуляторы и т.д.). В соответствии с [33], обобщенная схема такой системы управления (в одномерном исполнении) имеет вид, представленный на рис. 1.

Рис. 1. Обобщенная схема одномерной СУ.
Здесь Xy(t) - управляющий сигнал; X(t) - сигнал обратной связи; Y(t)- регулируемая переменная: R(t) - регулирующее воздействие; F(t) - возмущение.
Система управления (СУ) - замкнутый динамический комплекс, состоящий из управляемых объектов и трех подсистем: информационной, логико-вычислительной и исполнительной.
Объектом управления называют управляемую часть системы, т е, агрегат, машину или установку, требуемый режим функционирования которых должен поддерживаться управляющей частью системы в соответствии с выбранной или заданной целью управления.
Информационной подсистемой называют совокупность технических средств, предназначенных для получения, передачи и представления информации. К средствам, предназначенным для получения и преобразования первичной информации о внешних и внутренних факторах работы управляемых объектов, относятся следующие элементы СУ: датчики первичной информации, чувствительные и измерительные элементы, анализаторы, преобразователи, вычислительные устройства для первичной обработки информации и др., а также средства для передачи и представления информации в форме, удобной для управления, - передатчики, каналы связи, кодирующие и декодирующие устройства, преобразователи информации, приемники и т. д.
Логико-вычислительной подсистемой называют совокупность технических средств, предназначенных для обработки информации. К техническим средствам для переработки информации относятся разнообразные вычислительные средства, построенные на базе как аналоговой, так и цифровой техники.
Исполнительную подсистему образуют технические средства для формирования управляющих воздействий, осуществляющие непосредственное управление объектами в соответствии с целью управления. Техническими средствами исполнительной подсистемы являются разнообразные регуляторы, следящие системы, автоматические приводы и сервомеханизмы регуляторов. Следует также отметить, что в соответствии с классификацией [33], отражающей современный подход к структуризации системы управления,
усилительные устройства, непосредственно управляющие электромеханическими исполнительными элементами, входят, в основном, в комплекс исполнительной подсистемы.
Анализ устойчивости и динамических характеристик таких систем часто затрудняется тем, что получение выражений для передаточных функций ряда элементов расчетным путем является весьма сложным. Как правило, наибольшие трудности встречаются при теоретическом описании электромеханических устройств исполнительных подсистем и САР в целом. Это связано со следующими особенностями электромеханических элементов:
-такие элементы, как правило, являются полноразмерными четырехполюсниками, не обладающими “детектирующими” свойствами, то есть однонаправленностью передачи входного сигнала. Так, например, для исполнительных элементов типа двигателей и электромагнитов передаточная функция представляет собой матрицу, элементы которой определяются характером преобразования электромагнитной энергии [21];
-большинство таких элементов имеет более или менее явно выраженную нелинейность характеристик. Это объясняется, во-первых, тем, что сам характер электромеханических преобразований в таких элементах носит нелинейный характер (например, усилие, развиваемое магнитом, пропорционально квадрату тока) и, во вторых, нелинейностью характеристик магнитных материалов, применяемых для изготовления магнитопровода;
-теоретическое описание некоторых элементов приводит к сложным выражениям для их передаточных функций, причем определение параметров этих передаточных функций часто оказывается затруднительным. Это связано, в первую очередь, со сложными процессами, происходящими при преобразовании электромагнитной энергии. Так, например, усилие, развиваемое электромагнитом со сплошным токопроводящим магнитопроводом, зависит в значительной степени от конфигурации контуров вихревого тока, возникающих при изменении питающих токов или напряжений. Теоретическое описание такого рода процессов для магнитопровода произвольной формы оказывается крайне сложным [26];
Наладка таких систем также существенно облегчается, если имеется возможность оперативного определения динамических (частотных) характеристик элементов системы непосредственно на месте ее установки [14].
Практика проектирования, наладки и исследования сложных систем регулирования, описанная в литературе, подтверждает необходимость построения устройств для надежного экспериментального определения передаточных функций таких систем и их элементов [14,26,36].
В настоящее время существуют две основные группы промышленных приборов, пригодные для указанной цели.
К первой группе следует отнести частотные анализаторы (сигнал-процессоры), одной из функций которых является определение передаточных функций, Основным недостатком этих приборов является их чрезвычайно высокая стоимость (анализатор типа 2034 фирмы В&К - 35-40 тыс. долларов, аналогичный анализатор фирмы HP - 40-50 тыс. долларов). Кроме того, практически все анализаторы такого типа являются двухканальными, что затрудняет определение передаточных функций элементов, имеющих характеристики четырехполюсника.
Ко второй группе могут быть отнесены устройства, представляющие собой платы расширения для ПК. Эти устройства являются, как правило, многоканальными, Однако, большинство таких плат предназначено для использования в стационарных ПК и не включает в себя элементы генератора измерительных сигналов. Устройство такого типа, выпускаемое известными фирмами также имеют стоимость в пределах 1200...2500 $US и требуют для своей работы пакетов прикладных программ стоимостью 2500..4000 $US.
Такие цены обусловлены стремлением разработчиков этих систем сделать их максимально универсальными, то есть пригодными для вибрационных, акустических, механических, электрических и прочих измерений, что значительно усложняет их конструкцию и требования к математическому обеспечению [50,51]. Высокие цены, большие
габариты и излишняя универсальность таких систем в значительной степени затрудняет их применение при разработках, исследованиях и, особенно, при наладке систем в процессе производства и пусконаладочных работах непосредственно на объектах.
Актуальность настоящей работы определяется, с одной стороны, постоянно возрастающим объемом внедрения электромеханических систем регулирования во все области техники (общее машиностроение, газо- и нефтехимическая промышленность, средства связи, пищевая промышленность и др.), и с другой стороны, практическим отсутствием портативных и доступных измерительных устройств, требующихся для разработки, производства и наладки таких систем.
Целью работы является определение принципов построения и основных схемотехнических решений (на базе анализа параметров элементов электромеханических систем и экспериментальных исследований) универсального устройства, предназначенного для определения динамических характеристик электромеханических элементов систем управления.
Основные задачи, которые решались для достижения поставленной цели, можно сформулировать следующим образом:
- анализ статических и динамических характеристик электромеханических элементов систем автоматического регулирования и систематизация элементов по характеру передаточных функций, а также входных и выходных параметров;
-выбор оптимальных методов определения частотных характеристик электромеханических элементов и общих принципов построения устройств для их измерения;
-разработка методик определения частотных характеристик элементов, представляемых характеристиками как двух-, так и четырехполюсников; разработка алгоритмов определения передаточных функций элементов электромеханических систем;
-анализ схемотехнических решений по построению основных узлов измерительного устройства и разработка оптимального варианта схемотехнических решений;
-разработка программного обеспечения для измерительного устройства, включая собственно измерительный блок и управляющий ПК.
Научная новизна работы состоит в том, что проведенные при выполнении исследования позволили впервые получить следующие научные результаты:
-впервые обоснованы преимущества использования прямого измерения частотных характеристик со сканированием частоты применительно к цифровым системам определения передаточных функций электромеханических элементов систем регулирования, позволяющие более эффективно определять передаточные функции нелинейных элементов по сравнению со спектральным методом. На основании проведенного анализа впервые сделан вывод о целесообразности изменения принципов построения цифровых измерительных устройств для определения динамических характеристик элементов электромеханических систем;
-разработаны алгоритмы и программы для реализации предложенных методов экспериментального определения динамических характеристик элементов электромеханических систем.
Практическая ценность результатов, полученных в работе, заключается в следующем:
-сформулированы технические требования на универсальное измерительное устройство для определение динамических характеристик элементов электромеханических систем и функциональных групп элементов, использующее прямой метод измерения частотных характеристик;
-построен на основании разработанных технических требований макетный вариант измерительного устройства и математическое обеспечение для его функционирования;
-проведены, с использованием разработанного измерительного устройства, исследования по адекватности математических моделей электромагнитов со сплошным магнитопроводом для П-образной и кольцевой конфигураций магнитопроводов;
результаты исследований позволили уточнить параметры передаточных функций электромагнитов со сплошным магнитопроводом и предложить упрощенную феноменологическую модель для осевого электромагнита систем магнитного подвеса.
Результаты проведенных исследований внедрены в НПП ВНИИ Электромеханики.
Работа состоит из пяти разделов, заключения и четырех приложений.
Первый раздел посвящен анализу характеристик элементов электромеханических систем регулирования и классификации элементов по характерным параметрам.
Во втором разделе приводится обоснование выбора оптимального метода определения частотных характеристик элементов электромеханических систем и основных технических требований на измерительное устройство.
Третий раздел посвящен выбору типичной группы элементов электромеханических САР и разработке методик и алгоритмов определения частотных характеристик элементов для двух- и четырехполюсного представления их передаточных функций.
В четвертом разделе приведен анализ схемотехнических решений по элементам измерительного блока - процессорному блоку и блоку функционального генератора. Предложен алгоритм программ определения частотных характеристик объекта, включающего как программное обеспечение измерительного блока, так и программы для управляющего ПК.
В пятом разделе приведены экспериментальные исследования макетного образца разработанного измерительного блока и результаты экспериментально-расчетных
исследований электромагнитов со сплошным магнитопроводом для П-образной и кольцевой конфигураций магнитопроводов.
В ПРИЛОЖЕНИИ 1 приводятся технические требования на разработку
процессорного блока, а также принципиальные схемы и краткое описание этого блока.
В ПРИЛОЖЕНИИ 2 приводятся принципиальные схемы блока программно управляемого функционального генератора и расчет элементов схемы.
В ПРИЛОЖЕНИИ 3 приводятся исходные тексты программ определения частотных характеристик и их графического отображения для процессорного блока и управляющего ПК.
В ПРИЛОЖЕНИИ 4 приводится текст программы сравнительного расчета
зависимости погрешностей от параметров сигнала для гармонического и шумового сигналов.
ГРУППЫ ЭЛЕМЕНТОВ САР
3.1. Выбор характерной группы элементов САР для построения системы измерения
При построении полной системы измерения представляется целесообразным выбрать в качестве объекта исследования элемент электромеханической системы регулирования, для которого экспериментальное определение частотных характеристик представляет собой наиболее сложную задачу. В этом случае, такую систему можно без затруднений приспособить для определения характеристик других элементов, позволяющих применение более простых методик измерения. При этом при переходе к измерениям характеристик более простых элементов, в системе потребуется изменить лишь согласование уровней входных и выходных сигналов элемента и системы измерения, что обеспечивается либо переключениями пределов измерения, либо заменой датчиков и согласующих усилителей (при изменении вида входных и выходных сигналов).
Анализ характеристик элементов электромеханических систем регулирования, проведенный в разделе 1, позволяет считать, что определение частотных характеристик оказывается наиболее сложным для элементов типа электромагнитов, работающих в электромеханических системах регулирования в качестве аналогового исполнительного органа. Такими элементами являются, например, электромагнитные подшипники или электромагниты транспорта на электромагнитной подушке. Эти элементы обладают рядом особенностей, практически не встречающихся в совокупности в других группах элементов:
- проходные характеристики электромагнитов описываются полными уравнениями четырехполюсника [21];
- типичные значения постоянных времени таких электромагнитов находятся в пределах от единиц секунд до десятков миллисекунд, то есть для определения частотных характеристик может потребоваться как прямое измерение, так и расчет по экспериментальной проходной характеристике;
- типичные величины усилий, развиваемых такими электромагнитами, находятся в пределах от десятков до десятков тысяч ньютонов, а соответствующие значения токов электромагнитов - от десятков миллиампер до десятков ампер. Это приводит к необходимости применения датчиков, рассчитанных на различные диапазоны измерения как для согласования входных, так и выходных сигналов электромагнита со входами измерительной системы;
- проходная характеристика (ток-усилие) является существенно нелинейной (квадратичная с зоной насыщения), что может потребовать определения дифференциальных характеристик;
- электромагнит (в совокупности с якорем) обладает внутренней положительной обратной связью по положению (т.е. отрицательной жесткостью), ухудшающей устойчивость системы, в которой он работает и затрудняющей измерение соответствующих характеристик.
- Разработка принципов схемотехнической реализации измерений
С учетом перечисленных выше особенностей, система измерений частотных характеристик электромагнитов представлена на рис.3.1 для случая испытания упорного электромагнитного подшипника [18].
Испытуемый электромагнит состоит из собственно электромагнита 1, установленного на жестком фундаменте и якоря 2 (ротора), установленного на тот же фундамент через упругий элемент 3 и датчики усилий 4. На якоре установлены акселерометры 5 для измерения совместно с интегрирующими усилителями, входящими в состав устройства

Рис 3.1 схема испытательной установки
измерения частотных характеристик, перемещения якоря. Для устранения ошибок из-за возможной несимметрии или несоосности установки ротора и статора, используются группы из трех датчиков силы и трех акселерометров, сигналы которых суммируются в каждой из групп. Применение пьезоэлектрических датчиков и усилителей заряда позволяют суммировать сигналы датчиков непосредственным соединением их выходных цепей.
Для измерения усилий используются датчики типа 8001 или 8002 фирмы В&К или серии 9250 фирмы Kistler в сочетании со вторичными преобразователями типа 2635 фирмы В&К. Это позволяет осуществить надежное измерение усилий от единиц Ньютонов до десятков тысяч ньютонов [1,10,51,52].
Измерение перемещений якоря производится акселерометрами пьезоэлектрического типа 4370, 4371 фирмы В&К с теми же типами вторичных преобразователей, позволяющих производить однократное или двукратное интегрирование сигнала ускорения для получения сигналов скорости и перемещения. Такое построение системы измерений позволяет производить надежное измерение перемещений и скоростей в диапазоне 0,2...2000 Гц.
Применение пьезоэлектрических датчиков указанных типов для измерения усилия и перемещений обуславливается двумя особенностями. Во-первых, такие датчики могут применяться с одними и теми же усилителями-преобразователями, которые имеют к тому же внутренние схемы интегрирования для преобразования сигналов. Во-вторых, датчики, например, фирмы В&К, и соответствующие усилители-преобразователи имеют очень точную калибровку в рабочем диапазоне частот, что позволяет в большинстве случаев их использование в измерительных системах без дополнительной калибровки. Благодаря этим особенностям эти датчики в настоящее время являются как бы неофициальным промышленным стандартом для виброметрических измерений. В качестве другого такого же стандарта можно назвать серию токовихревых датчиков фирмы Bentley-Nevada. Однако эти датчики и многочисленные их видоизменения обладают одним существенным недостатком, а именно они оказываются чувствительными к первоначальной установке зазора между датчиком и измеряемой поверхностью. Несмотря на частичное устранение этого недостатка в современных системах таких датчиков, при их применении требуется их первоначальная калибровка. Кроме того, эти датчики оказываются чувствительными к материалу поверхности, по которой производится измерение. Различные типы контактных датчиков (реостатные, индуктивно-трансформаторные с подвижным штоком) как правило, плохо работают на частотах порядка сотен герц и выше.
Питание обмотки электромагнита производится через усилители (серии 2700 фирмы В&К, LV50 фирмы RFT или соответствующим усилителем постоянного тока любого другого типа. Для согласования сигнала тока электромагнита со входом измерительного устройства используются датчики тока, из которых наиболее подходящими являются датчики серии HY фирмы LEM, имеющие номинальные значения токов в пределах 5...25 А и выходной сигнал напряжения, пропорциональный току с номинальным значением 4 В. При измерениях параметров маломощных электромеханических элементов для тех же целей возможно также применение шунтов. Однако в случае испытания достаточно мощных электромагнитов (на десятки ампер с питанием от ШИМ усилителей) применение гальванически развязанных датчиков тока является необходимым.
Согласование значений входного напряжения электромагнита со входом измерительного блока осуществляется с помощью делителя напряжения.
Такое построение системы позволяет производить одновременные измерения и запись в память как двух входных (ток и напряжение), так и двух выходных (усилие, перемещение) сигналов испытуемого электромагнита. Это дает возможность выбрать любую тройку сигналов для построения матрицы передаточной функции электромагнита.
Измерение входного сигнала испытуемого элемента (вместо прямого его задания) необходимо, поскольку применяемые для питания электромагнита усилители мощности указанных выше типов (как и большинство других), не имеют калиброванных коэффициентов усиления, что не дает возможности точно задать величину входного сигнала электромагнита.
Следует отметить, что при измерении по схеме рис.3.1 а будет определяться передаточная функция электромагнита, нагруженного на жесткость упругого элемента, на котором установлен ротор и жесткость датчиков усилия. Однако, для датчиков пьезоэлектрического типа жесткость существенно выше, чем для датчиков усилия других типов. При этом выбором жесткости упругого элемента для испытуемого электромагнита может быть создан режим, соответствующий “холостому ходу” четырехполюсника (перемещение Z=0) или режим “короткого замыкания” (усилие F=0).
Пример использования системы для тарировки и проверки датчиков ускорения и усилия приведены на рис.3.1б [51,52].
При тарировке датчиков ускорения проверяемый датчик устанавливается на столе электродинамического возбудителя (ЭДВ) в непосредственной близости с образцовым датчиком. Возбуждение ЭДВ производится от измерительной системы через соответствующий усилитель. Микропроцессорный блок измерительной части устройства осуществляет сравнение сигналов образцового и проверяемого (рабочего) датчика и вычисляет параметры градуировочной кривой рабочего датчика
 где
где
 и
и  - амплитуды сигналов рабочего и образцового датчика соответственно. Фазовая погрешность ф рабочего датчика определяется аналогично.
- амплитуды сигналов рабочего и образцового датчика соответственно. Фазовая погрешность ф рабочего датчика определяется аналогично.
При тарировке датчиков усилия рабочий датчик устанавливается и возбуждается также, как и в предыдущем случае, но с нагружением дополнительной массой т. Измерительное устройство считывает сигналы ускорения с образцового датчика ускорения и сигнал усилия с рабочего датчика усилия и вычисляет градуировочную кривую рабочего датчика
 где
где
 - сигнал рабочего датчика усилия;
- сигнал рабочего датчика усилия;
 - сигнал образцового датчика ускорения
- сигнал образцового датчика ускорения
3.2. Методика определения передаточных функций выбранной группы элементов

3.2. Схема пассивного четырехполюсника
В соответствии с [21], передаточные функции электромагнитного преобразователя представляют собой уравнение несимметричного пассивного четырехполюсника (рис.3.2). В соответствие с [21], уравнения (17) описывают передаточную функцию электромагнита (без учета насыщения, рассеяния, вихревых токов). Учет этих особенностей приводит к усложнению выражений для коэффициентов этих уравнений, однако их общая структура остается неизменной.
 (3.1)
(3.1)

В этих уравнениях i, u, v и F - соответственно значения входного тока, напряжения на обмотке электромагнита, скорости перемещения якоря и усилия, развиваемого якорем на внешней нагрузке, a Lo, То, G - соответственно индуктивность электромагнита при начальном зазоре, коэффициент связи и проводимость (механическая податливость) на выходе электромагнита.
Для определения коэффициентов передаточных функций электромагнита его уравнения можно представить в G-форме:

 (3.2)
(3.2)
В этих уравнениях коэффициенты G определяют характеристики реального электромагнита и могут быть определены экспериментально. При этом можно считать, что коэффициенты G с определенной степенью точности соответствуют коэффициентам уравнения (3.1):


 (3.3)
(3.3)

В соответствие с [35,36], коэффициенты таких уравнений можно определить, измеряя входные и выходные сигналы четырехполюсника при опытах короткого замыкания и холостого хода. В нашем случае опыт холостого хода соответствует значению выходной величины v=0. Из этого опыта коэффициенты Gl 1 и G22 могут быть легко определены как: i 

(3.4)


Опыт короткого замыкания соответствует усилию, развиваемому электромагнитом на внешней нагрузке F =0. При этом:
U*G21=-G’22V

G’22= -G21U/V [Н*с/м]
(3.5)
При проведении опыта короткого замыкания следует иметь в виду, что основной составляющей коэффициента G22 является так называемая “отрицательная жесткость”. Это явление связано с изменением потоков в зазоре электромагнита при постоянном токе в обмотке при изменении зазора между якорем и полюсом электромагнита. Поскольку при приближении якоря к полюсу (уменьшении зазора) увеличивается поток в зазоре, то усилие, развиваемое электромагнитом в этом случае также увеличивается [21]. Это явление может быть моделировано так называемой “отрицательной жесткостью”, то есть механическим звеном, имеющим характеристику F=cx (с- отрицательная жесткость).
Поскольку из-за наличия отрицательной жесткости при испытаниях электромагнита крайне затруднительно создать режим F=0, такое испытание следует проводить при нагружении якоря электромагнита на жесткость gH. несколько превышающую величину отрицательной жесткости электромагнита при заданных значениях u, i и рабочем зазоре А
При этом вместо собственного коэффициента электромагнита G22 определяется коэффициент G22’, а затем можно определить коэффициент G22:
G22=G22’-gH. (3.6)
Такой опыт не вполне корректно называть опытом короткого замыкания, поскольку при этом осуществляется режим работы четырехполюсника на заданную нагрузку. Однако, используя приведенную выше методику, можно вычислить реальный коэффициент G22 для четырехполюсника.
При испытаниях электромагнитов в соответствии с 3.1а, опыт холостого хода (v=0) проводится при установке якоря электромагнита на жесткое основание через датчики усилия F. В качестве датчиков усилия применяются пьезоэлектрические датчики фирмы В&К с весьма большой жесткостью. Поэтому в диапазоне до первой резонансной частоты (соответствующей колебаниям массы якоря на жесткостях датчиков) систему можно считать удовлетворяющей условиям холостого хода.
При установке между датчиком и основанием упругого элемента с жесткостью, превышающей отрицательную жесткость, создаваемую электромагнитом, можно осуществить режим нагрузки электромагнита элементом с заданной характеристикой для определения G22’, а затем G22. При этом следует учитывать, что при установке упругого элемента его жесткость должна превышать не только отрицательную жесткость в рабочей точке, но и превышать возможные изменения отрицательной жесткости при колебанияхякоря. Предположительно, величина жесткости упругого элемента должна в 1,5...2 раза превышать отрицательную жесткость электромагнита в рабочей точке. Следует также учитывать, что при применении упругого элемента с существенно большей жесткостью, снижается точность определения коэффициента G22. Этот вопрос будет детально исследован на следующем этапе работы.
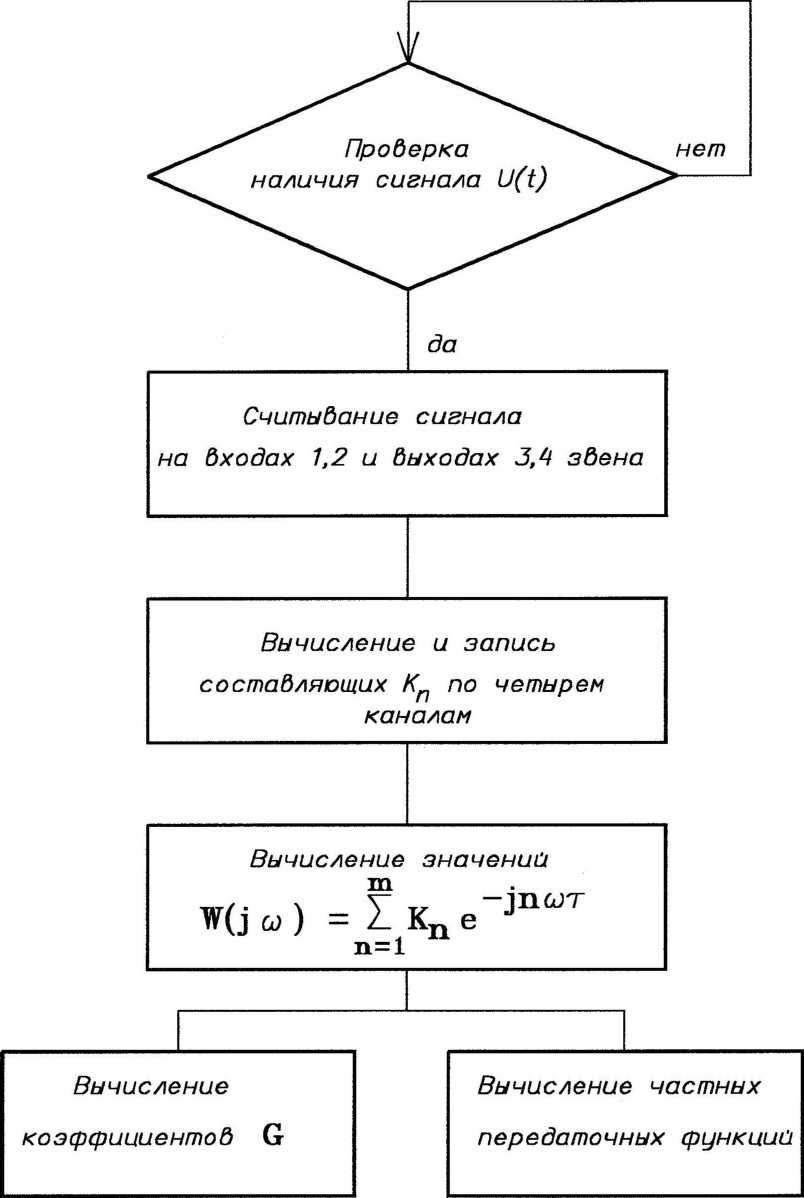
Алгоритм вычислений, соответствующий описанной методике измерения, приведен на рис.3.3. В дополнение к приведенной выше методике в этом алгоритме добавлен блок вычислений частных передаточных функций элемента, который используется для определения передаточных функций в упрощенных режимах в виде отношений одной из выходных величин к одной из входных. Этот блок используется также при определении передаточных функций датчиков, усилительных устройств или передаточных функций систем регулирования в целом и их участков
3.4. Методика определения динамических коэффициентов передачи
При проведении экспериментов по определению передаточных функций электромагнитов (п.3.3) необходимо учитывать следующее:
во-первых, усилие, развиваемое электромагнитом, даже при учете абсолютной линейности характеристик магнитопровода, нелинейно (квадратично) зависит от величины протекающего по обмотке тока (приложенного напряжения);
- во-вторых, характеристики магнитопровода являются существенно нелинейными как в области малых напряженностей магнитного поля, так и в области больших напряженностей.
В связи с этим, при экспериментальном определении характеристик электромагнитов обычно ставится задача определения передаточных функций электромагнита в окрестностях заранее заданной рабочей точки, соответствующей, например, рабочему току электромагнита Io

Рис 3.3 Алгоритм
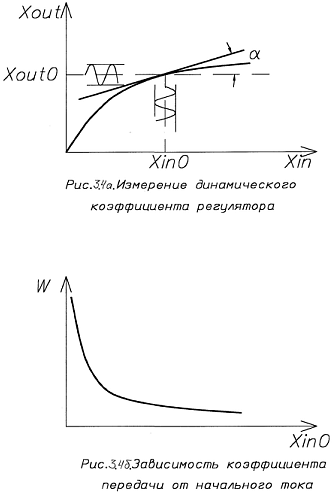
Определение динамических характеристик электромагнита будет проводится следующим образом. Испытуемый электромагнит возбуждается одновременно двумя сигналами: рабочим током 1о и малым сигналом переменного тока (напряжения) с частотой, изменяемой в пределах, требуемых для измерения динамической характеристики. За сигнал возбуждения в этом случае принимается только сигнал переменного тока или напряжения, а в выходных величинах (перемещении, усилии) измеряются также только переменные составляющие. Принцип такого измерения показана на 3.4а, на рис.3.4б показано изменение модуля передаточной функции в зависимости от величины начального тока. На этом рисунке входные величины обозначены с индексом in, а выходные с индексом out. Значение динамического коэффициента передачи в точке (Х„,о, Хоию) обозначено коэффициентом а.
При организации такого эксперимента следует использовать функциональный генератор, имеющий возможность задания начального смещения выходного напряжения (п.2.6.8). Кроме того, используемые для эксперимента усилители мощности должны также являться усилителями постоянного тока
3.4. Определение передаточных функций путем подачи на вход элемента
ступенчатого сигнала
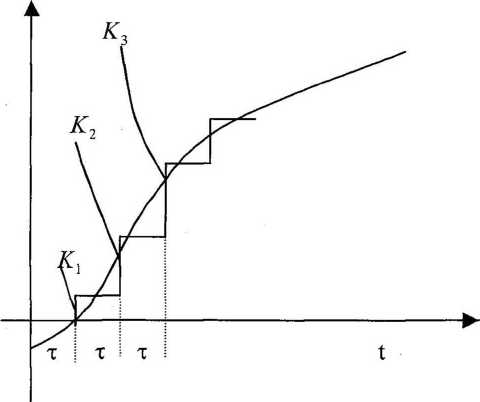
В соответствии с [8], для определения передаточных функций элемента по его переходной характеристике выбран метод аппроксимации переходной функции ступенчатой функцией с интервалом т (3.5). Такой метод естественным образом сочетается с применением аналогового-цифрового преобразования результатов измерения и при достаточно малых т обладает высокой точностью. Минимальные значения х при этом определяются практически только быстродействием АЦП и для выбранного типа контроллера С166 (С167) составляют около 10 мкс. Таким образом, представляется возможным с помощью этого метода произвести точные измерения переходной функции с характерной постоянной времени порядка единиц или десятых долей миллисекунд
3.5. Аппроксимация непрерывной функции ступенчатой функцией
Поскольку интервал между считываниями АЦП в указанном микроконтроллере можно увеличивать практически без ограничений, этот способ вполне применим для измерений характеристик элементов с постоянными времени в десятки секунд и более.
Преобразования измеренных значений переходной функции производятся далее по алгоритму (в соответствии с 3.5) следующим образом:
 . (3.7)
. (3.7)
и отсюда
 (3.8)
(3.8)
следовательно,так как
W(p) = pL[h(t)] (3.9)
то
 (3.10)
(3.10)
По вычисленному значению передаточной функции подстановкой p = j определяются частотные характеристики элемента. Алгоритм вычислений приведен на рис.3.6
Рис. 3.6. Алгоритм определения частотных характеристик по переходной функции
3.5. Представление результатов эксперимента
Результаты измерений передаточных функций в соответствие с алгоритмами рис.3.3 и рис.3.6 записываются в файлы в виде таблиц. В первой колонке таблиц записываются значения переменной частоты, во второй и третьей - соответствующие им значения модулей и аргументов коэффициентов G или частных передаточных функций W. Эти таблицы могут использоваться как таблично заданные значения передаточных функций элемента для расчета систем регулирования, а также представляться на экране сопряженной с устройством ПК в виде графиков частотных зависимостей коэффициентов. В последнем случае для графического представления результатов можно использовать как существующие программы (MATCAD, GRAFER, EXCEL и др.), так и упрощенные программы собственной разработки (PLOT, FC).
Выводы:
1). Наиболее характерной группой элементов САР можно считать устройства типа электромагнитов, работающих в электромеханических системах регулиров