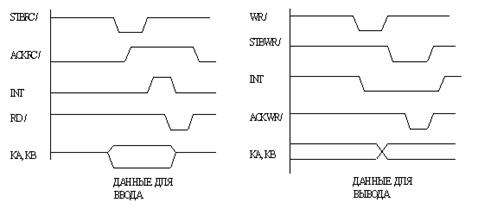
При работе каналов КА и КВ на ввод данных информация записывается в регистр канала по заднему фронту сигнала STBRC/(стробирующий сигнал приема). Получив данные, ППИ вырабатывает сигнал ACK RC/ (подтверждение приема), сохраняемый до окончания передачи в микроЭВМ по сигналу RD/. Возвращаемый внешнему устройству сигнал ACKRC/ запрещает ему формировать новый сигнал STBRC/.
Если сигнал ACKRC/ и внутренний триггер разрешения прерываний (INTE) канала установлены в "1", то по фронту сигнала STBRC/ на выходе ППИ формируется сигнал запроса прерывания INT, одновременно фиксируемый в слове состояния ППИ. Этот сигнал может быть использован для информирования микроЭВМ о готовности данных к вводу. По сигналу чтения RD/ из микроЭВМ сначала сбрасывается сигнал запроса, а затем сигнал ACKRC/, разрешая внешнему устройству передачу следующего байта данных.
Установка - сброс триггеров разрешения прерывания INTE1, INTE2 осуществляется с помощью управляющих слов установки разрядов 4 (INTE1)и 2 (INTE2) канала КС.
Разряды 6, 7 канала КС могут быть использованы как для ввода, так и для вывода. Если они запрограммированы для ввода, то чтение информации на этих входах производится с помощью операции чтения из канала КС. Если они запрограммированы для вывода, то их можно использовать только путем установки или сброса разрядов 6, 7 канала КС.
Описание алгоритма:
1. Инициализация ВВ55 на режим 1 (ввод через КВ, вывод через КА),
2. Чтение слова состояния (SW).
3. Проверка флага готовности канала КВ (по сигналу STBRC/ от кнопки SA1). Если флаг равен 0, переход на п.2, иначе на п.4
4. Ввод данных с наборного поля канала КВ.
5. Пересылка данных в РОН В.
6. Чтение слова состояния (SW).
7. Проверка флага готовности канала КА (по сигналу ACKWR/ от кнопки SA3).Если флаг равен 0, переход на п.6, иначе на п.8.
8. Пересылка данных из РОН В в аккумулятор К580.
9. Вывод данных на индикаторы канала КА.
10. Перейти на п.2.
Программа для исследования режима 1:
MVI A, 10100110b
OUT B3h
LoopB: IN B2h
ANI 2
DCR A
JZ LoopB
IN B1h
MOV B, A
LoopA: IN B2h
ANI 80h
JZ LoopA
MOV A, B
OUT B0h
JMP LoopB
Выполнить программы, обеспечив ввод (вывод) в режиме 1 по одному из каналов КА или КВ, одновременно используя один из разрядов канала КС для синхронного обмена.
Для организации вышеописанного необходимо заменить последнюю строку программы на:
MVI A, 0Bh
OUT B3h
MVI A, 0Ah
OUT B3h
JMP LoopB
Организация передачи/приема данных по двунаправленному каналу обмена программируемого параллельного интерфейса (режим 2).
Режим 2 используется для двунаправленного асинхронного обмена информацией по каналу КА. Сигналы управления, передаваемые по пяти линиям канала КС, представляют собой комбинацию сигналов, используемых при работе канала КА в режиме 1.
Основным отличием режима 2 от режима 1 является то, что информация, записанная в регистр канала КА для вывода, появляется на его выходах не сразу, а после выдачи внешним устройством сигнала ACKWR/. До этого момента выходы канала КА находятся в состоянии высокого импеданса.
Описание алгоритма:
1. Инициализация ВВ55 канала КВ на ввод в режиме 1, канала КА на режим 2.
2. Чтение слова состояния (SW).
3. Проверка флага готовности канала КА по вводу (по сигналу STBRC/ от кнопки SA2). Если флаг равен 0, переход на п.2, иначе на п.4
4. Ввод данных с наборного поля канала КА.
5. Пересылка данных в РОН В.
6. Чтение слова состояния (SW).
7. Проверка флага готовности канала КВ по вводу (по сигналу STBRC/ от кнопки SA1). Если флаг равен 0, переход на п.6, иначе на п.8.
8. Ввод данных с наборного поля канала КВ.
9. Обработка данных, полученных через каналы КА и КВ.
10. Вывод результата совместной обработки через канал КА.
11. Чтение слова состояния (SW).
12. Проверка флага готовности канала КА по выводу (по сигналу ACKWR/ от кнопки SA3). Если флаг равен 0, переход на п.11, иначе на п.2.
Программа для исследования режима 2:
MVI A, 11010110b
OUT B3h
LoopА: IN B2h
ANI 20h
JZ LoopA
IN B0h
MOV B, A
LoopB: IN B2h
ANI 2h
JZ LoopB
IN B1h
ADD B
OUT B0h
IN B2h
ANI 80h
JZ LoopA






