ИНЖЕНЕРНЫЙ ФАКУЛЬТЕТ
Кафедра физики и электротехники
Лекции
по
электроприводу
Ярославль
2009
Таблица №1
| Показатели нагрева
| Класс изоляции по нагревостойкости
|
| А
| Е
| В
| F
| H
|
| Например температура нагрева °С
| 105
| 120
| 130
| 155
| 180
|
| Нормирование превышения температуры при изменении методом сопротивления °С (сопротивление постоянному току обмоток
|
60
|
75
|
80
|
100
|
125
|
| Измерение методом термометра
| 50
| 65
| 70
| 85
| 105
|
|
|
|
|
|
|
|
Если температура окружающей среды ниже +40°С, то нагрузку электродвигателя увеличивать не следует. Объясняется это тем, что при большой разности температур между  д и определение среды превышающей значения
д и определение среды превышающей значения  происходит не тепловой износ изоляции, а физический, который вызывает ее разрушение силами теплового напряжения. Тепловой износ изоляции имеет место лишь при температуре электромашины д
происходит не тепловой износ изоляции, а физический, который вызывает ее разрушение силами теплового напряжения. Тепловой износ изоляции имеет место лишь при температуре электромашины д  норм.
норм.
Таким образом, номинальная мощность указанная на паспортном щитке электродвигателя, предельна с точки зрения допускаемого нагрева двигателя и диктуется классом нагревостойкости используемой в двигателе изоляции. На основании (12) и таблицы №1 можно сделать вывод, что при применении в ЭД более нагревостойкой изоляции повышается их мощность без изменения массогабаритных показателей, СА на Н мощность повышается приблизительно в 2 раза.
8,4 Расчет мощности ЭП по допустимому нагреву.
В общем случае основа расчета мощности двигателя ЭП – это нагрузочная диаграмма, которую рассчитывают или определяют экспериментально. На основании нагрузочной диаграммы методом эквивалентных величин рассчитывают постоянную эквивалентную нагрузку Lэкв (*§5,1), действующую на валу двигателя ЭП. Далее с учетом возможных технологических пауз в работе ЭП рассчитывают требуемый номинальный показатель нагрузки ЭД.
Lн  Lэкв/
Lэкв/  .
.
Где Lн- номинальный показатель нагрузки двигателя.
Lэкв – эквивалентный показатель нагрузочной диаграммы, расчет по (*§5,1)
Рм – коэффициент механической (токовой  ) перегрузки двигателя,
) перегрузки двигателя,
Рм = Ркр/Рн, Ркр( ) – кратковременно допускаемая мощность (ток) двигателя,
) – кратковременно допускаемая мощность (ток) двигателя,
Рн - номинальная мощность (ток) двигателя.
В длительном режиме работы S1. Когда продолжительности непрерывной работы двигателя ЭП превышает 90 минут и двигатель полностью использован по нагреву, достигнув установившейся температуры, значение коэффициента Рм =1.
Если режим работы ЭД отличается от длительного S1, то с учетом возможных технологических пауз в работе его коэффициент механической (токовой) перегрузки Рм рассчитывается через коэффициент тепловой перегрузки Рт, которая представляет собой отношение повышенных кратковременных потерь мощности  в двигателе к его номинальным
в двигателе к его номинальным  , то есть
, то есть  . Его можно выразить в виде:
. Его можно выразить в виде:

 – отношение постоянных потерь мощности в двигателе к номинальным переменам (электрическим потерям).
– отношение постоянных потерь мощности в двигателе к номинальным переменам (электрическим потерям).
Тогда получим взаимосвязь между коэффициентами механической (токовой) и тепловой нагрузок.

С учетом занижения неустановившихся расчетных температур двигателя целесообразно для компенсации возникающей погрешности считать, что все потери мощности в электродвигателе переменные, то есть 
Тогда 
В общем виде коэффициент тепловой перегрузки  , (1)
, (1)
Где е = 2,718;  – продолжительность работы и отключенного состояния электродвигателя или работы на холостом ходу для режима S6, мин;
– продолжительность работы и отключенного состояния электродвигателя или работы на холостом ходу для режима S6, мин;
 =0,5 – коэффициент учитывающий ухудшение теплоотдачи самовентилируемых двигателей закрытого обдуваемого исполнения в отключенном состоянии (при работе на холостом ходу) в режиме S6 =1);
=0,5 – коэффициент учитывающий ухудшение теплоотдачи самовентилируемых двигателей закрытого обдуваемого исполнения в отключенном состоянии (при работе на холостом ходу) в режиме S6 =1);
Тнагр – постоянная времени нагрева электродвигателя, мин. Для большинства электродвигателей постоянная времени нагрева Тнагр = 15 … 25 мин и при продолжительном расчете мощности двигателя по допустимому нагреву может быть принято Тнагр =20 мин. После выбора электродвигателя среднее значение постоянного времени нагрева (мин) может быть уточнено по
Тнагр = 6 
Для кратковременного режима работы S2, когда в течение технологических пауз в работе ЭД полностью охлаждается до температуры окружающей среды, т.е tотк  , то по формуле (1) получим
, то по формуле (1) получим
В отдельном режиме работы S1 tраб и согласно (1) Рт=1, то есть ЭД не допускает тепловой перегрузки.
Окончательно правильность расчета по методу эквивалентных величин уточняют по методу средних потерь. Для правильно выбранного по допустимому нагреву ЭД должно выполняться условие:
 ,
,
Где  - средние потери мощности в двигателе при работе, Вт
- средние потери мощности в двигателе при работе, Вт
 ,
,
Где  - потери мощности и продолжительность нагрузки двигателя на i участке нагрузочной диаграммы.
- потери мощности и продолжительность нагрузки двигателя на i участке нагрузочной диаграммы.
Потери мощности на участке нагрузочной диаграммы, преобразование к виду P=f(t) равны:
 ,
,
Где  частичный КПД ЭД при
частичный КПД ЭД при  нагрузке на валу определяют по рабочей характеристике двигателя = f (
нагрузке на валу определяют по рабочей характеристике двигателя = f ( ) или при отсутствии таковой расчет
) или при отсутствии таковой расчет
где  - отношение постоянных потерь мощности в двигателе к его номинальным переменным потерям (коэффициент потерь),
- отношение постоянных потерь мощности в двигателе к его номинальным переменным потерям (коэффициент потерь),  для электродвигателей общего назначения =5,5 - 0,7; для крановых =0,6 – 1; х – степень загрузки двигателя, х =
для электродвигателей общего назначения =5,5 - 0,7; для крановых =0,6 – 1; х – степень загрузки двигателя, х =  .
.
Постоянные потери мощности  , которые выделяются в двигателе при работе на холостом ходу (Р2 =0,
, которые выделяются в двигателе при работе на холостом ходу (Р2 =0,  =0) и которые необходимо учитывать, например в режиме S6 при расчете средних потерь по рассчитывают по формуле
=0) и которые необходимо учитывать, например в режиме S6 при расчете средних потерь по рассчитывают по формуле

Для повышения точности теплового расчета мощности АД общего применения продолжительного режима S1 для использования в кратковременном S2 или повторно – кратковременном S3 режимах работы целесообразно воспользоваться номограммой Л.П. Шинкова (например).
При использовании специальных электродвигателей, когда в режим работы S2 ставится двигатель режима S2, в режим S3 – двигатель режима S3, а в режим S6 – двигатель режима S6, расчет номинальной мощности  двигателя ведется по формулам соответственно:
двигателя ведется по формулам соответственно:
 для S2 режима
для S2 режима
 для S3 режима,
для S3 режима,
 для S6 режима.
для S6 режима.
где  - эквивалентная мощность на валу двигателя за период нагрузки
- эквивалентная мощность на валу двигателя за период нагрузки
tраб.x, ПВх, ПНх – длительность рабочего периода по нагрузочной диаграмме
tраб.н, ПВнорм, ПНнорм – длительность рабочего периода стандартная (нормированная).
В случае использования ЭД длительного режима нагрузки S1 в повторно-кратковременном режиме S3 его можно трактовать как ЭД режима нагрузки S3 со стандартным значением ПВнорм =100%. При этом необходимо учитывать ухудшение теплоотдачи двигателя в отключенном состоянии и пре перерасчете по формуле
Пользоваться так называемой приведенной продолжительностью включения с использованием коэффициента :
ПВ¢х =  100%
100%
тогда получим общее выражение

Л10. Проверка мощности двигателя электропривода по дополнительным условия.
Выбранный по допустимому нагреву ЭД необходимо проверить по мощности исходя из обеспечения им следующих условий: пуска, статистической и динамической устойчивости, допустимого нагрева при продолжительном пуске, допустимой частоты включений.
Для обеспечения пуска ЭП его мощность должна быть достаточной для выполнения условия:
 , (1)
, (1)
где  - пусковой момент двигателя с учетом возможного снижения питания при пуске, Н.м
- пусковой момент двигателя с учетом возможного снижения питания при пуске, Н.м
 - момент статистического сопротивления на валу ЭД при трогании с места, Н.м
- момент статистического сопротивления на валу ЭД при трогании с места, Н.м
 - избыточный момент минимальный, необходимый для обеспечения пуска Н.м. Обычно = 0,2
- избыточный момент минимальный, необходимый для обеспечения пуска Н.м. Обычно = 0,2  .
.
Применительно к (1) асинхронному ЭП можно записать
 (2)
(2)
Если обе части выражения (2) умножить на номинальную угловую скорость ЭД  и учесть, что Мн =Рн, то получим формулу для расчета необходимой мощности АД и из условия обеспечения пуска ЭП
и учесть, что Мн =Рн, то получим формулу для расчета необходимой мощности АД и из условия обеспечения пуска ЭП
 (3)
(3)
Правила устройства электроустановки (ПУЭ) в общем случае допускают снижение напряжения при пуске асинхронного ЭП до 30% ниже номинального на зажимах пускового АД (Uп*=0,7) и до 20% - на зажимах параллельно работающих (Uраб*=0,8)
Из условия обеспечения статической устойчивости мощность ЭП достаточна, если выполняется условие:
 (4)
(4)
где  - минимальный (критический) вращающий момент ЭД с учетом возможного снижения напряжения питания, Н.м;
- минимальный (критический) вращающий момент ЭД с учетом возможного снижения напряжения питания, Н.м;
 - максимально возможный момент статической нагрузки на валу ЭД при работе Н.м
- максимально возможный момент статической нагрузки на валу ЭД при работе Н.м
Применительно к асинхронному ЭП (4) преобразуется к виду:
 (5)
(5)
на основании (5) умножением обеих частей соотношения на и с учетом, что максимально возможная мощность статической нагрузки на валу ЭД при работе  ,
,
получим формулу по определению мощности АД из условия обеспечения статической устойчивости ЭП
 (6)
(6)
Динамическую устойчивость ЭП при ударной и резко переменной нагрузках оценивают на основании

где Тм – электромеханическая постоянная времени ЭП, с
для ЭП с ДПТ Тм = 𝚥  /Мк
/Мк
для ЭП с АД Тм= 𝚥 S(н)/Мн
S(н) – скольжение АД при номинальном моменте нагрузки. Для естественной механической характеристики АД S(н)= Sн
Мс.п. – момент статического сопротивления перегрузки
Мк – максимальный (критический) вращающий момент
 - момент ЭД до перегрузки, который на первом участке нагрузочной диаграммы при t=0,
- момент ЭД до перегрузки, который на первом участке нагрузочной диаграммы при t=0,  , Н.м
, Н.м
 -приведенный момент инерции ЭП, кгм2
-приведенный момент инерции ЭП, кгм2
- угловая скорость идеального холостого хода двигателя, рад/с.
Необходимость в проверке мощности двигателя ЭП по допустимому нагреву при продолжительном пуске возникает при длительности прямого пуска ЭП свыше 10с.
Если в течении пуска пренебречь теплоотдачей двигателя, что допустимо, то на основании рассмотрения уравнения теплового баланса ЭД
 - дифференцированное уравнение теплового баланса
- дифференцированное уравнение теплового баланса
 – потери мощности в двигателе
– потери мощности в двигателе
 – теплоемкость нагрева двигателя
– теплоемкость нагрева двигателя
 - теплоотдача двигателя
- теплоотдача двигателя
 – превышение температуры двигателя
– превышение температуры двигателя
для данного допущения получим после интегрирования формулу по определению превышения его температуры Uкон в конце пуска над первичной перед пуском в виде

где  - потери энергии в ЭД при пуске, Дж
- потери энергии в ЭД при пуске, Дж
С – средняя удельная теплоемкость двигателя, которая может быть принята на уровне
400 Дж (кг*град)
m – масса ЭД, кг.
Нормы допускают кратковременный нагрев изоляции электродвигателей при длительном пуске до температуры 200°С для изоляции класса нагревостойкости
«В» (130°С) и 225°С – для F (155°С)
Если работа ЭП сопровождается частыми включениями и отключениями, то мощность ЭД проверяют по допустимой частоте включения
 (7)
(7)
Где  - фактическая частота включения двигателей ЭП
- фактическая частота включения двигателей ЭП
 - предельно допустимая частота включений двигателей ЭП исходящего допустимого нагрева
- предельно допустимая частота включений двигателей ЭП исходящего допустимого нагрева
В предположении что частичная мощность на валу двигателя при работе близка к номинальной из равенства энергии тепловыделения и теплоотдачи, имеем
 (8)
(8)
где  - потери энергии соответственно при пуске и электрическом торможении двигателя, Дж.
- потери энергии соответственно при пуске и электрическом торможении двигателя, Дж.
 - его номинальные потери мощности, Вт;
- его номинальные потери мощности, Вт;
 - коэффициент охлаждения двигателя с самовентиляцией
- коэффициент охлаждения двигателя с самовентиляцией 
 -относительная продолжительность включения двигателя ЭП
-относительная продолжительность включения двигателя ЭП

Предварительный расчет мощности приводного ЭД
Её определяют исходя из трех условий:
· нагрев двигателя во время работы должен быть не более допустимого для данного класса изоляции;
· перегрузочная способность двигателя должна быть достаточной, что бы обеспечить кратковременно максимальные значения момента, определяемые, как правило, динамическими режимами пуска или торможения;
· у приводов механизмов с большим моментом инерции или у механизмов с большим числом включений в час пусковые потери в двигателе не должны приводить к перегреву ротора.
Нагрев двигателя более допустимого приводит к ускоренному старению изоляции и выходу двигателя из строя. Допустимая температура нагрева в зависимости от класса применяемой изоляции дана таблично:
|
Параметр
|
Класс изоляции
|
| E
| B
| F
| H
|
| Допустимая температура нагрева изоляционного материала, ос
| 120
| 130
| 155
| 180
|
| Допустимая температура нагрева обмоток электродвигателя, ос
| --
| 120
| 140
| 165
|
Расчёты температуры нагрева двигателя в соответствии с известной нагрузочной диаграммой очень трудоёмки. Наиболее точным методом является определение средних потерь энергии в двигателе. Для каждой нагрузки определяют потери и затем находят среднее значение потерь за цикл работы. Метод применяется редко из-за сложности определения потерь.
На практике пользуются косвенными методами оценки нагрева двигателя. Это методы определения эквивалентных величин: тока, момента или мощности.
Метод эквивалентного тока.
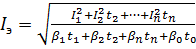
Потери в двигателях примерно пропорциональны тока в квадрате. Зная график тока, протекающего по обмоткам двигателя, можно определить для каждого конкретного режима работы значение эквивалентного тока  , характеризующее его нагрев. Эквивалентный ток - это такой ток с постоянным значением, который вызывает такой нагрев электродвигателя, как и реально протекающий ток с изменяющим значением в соответствии с графиком нагрузки механизма:
, характеризующее его нагрев. Эквивалентный ток - это такой ток с постоянным значением, который вызывает такой нагрев электродвигателя, как и реально протекающий ток с изменяющим значением в соответствии с графиком нагрузки механизма:
 , (1)
, (1)
Где  – время цикла;
– время цикла;  – ток соответственно в течение времени
– ток соответственно в течение времени 
 .
.
Условные проверки двигателя на нагрев такое:
 , (2)
, (2)
Где  – номинальный ток двигателя
– номинальный ток двигателя
Метод эквивалентного тока даёт достаточно достаточно достоверные результаты, если сокращается постоянство сопротивлений двигателя и потерь в стали независимо от нагрузки.
Метод эквивалентного момента.
Если момент двигателя пропорционален току, то можно пользоваться методом эквивалентного момента. Эквивалентный момент  - это постоянный момент нагрузки, который вызывает такой же нагрев двигателя, как и реально изменяющийся момент в соответстивии с графиком работы механизма:
- это постоянный момент нагрузки, который вызывает такой же нагрев двигателя, как и реально изменяющийся момент в соответстивии с графиком работы механизма:
 (3)
(3)
 ,
,  ,
,  – момент соответветственно в течении времени
– момент соответветственно в течении времени  ,
,  , …
, …
Условие правильности выбора двигателя

Где  - номинальный момент двигателя.
- номинальный момент двигателя.
Этот метод применим для двигателей постоянного тока с независимым возбуждением, для асинхронных двигателей и других, у которых момент пропорционален току и соблюдены условия, указанные для метода эквивалентного момента.
Метод эквивалентной мощности.
Если скорость двигателя изменяется мало и можно считать, что мощность пропорциональна моменту, следовательно току, то эквивалентная мощность:
 (4)
(4)
 ,
,  ,
,  – момент соответветственно в течении времени , , …
– момент соответветственно в течении времени , , …
Производить проверку двигателя на нагрев по эквивалентной мощности можно для нерегулируемых по скорости электродвигателей, у которых момент пропорционален току. Условие правильности выбора электродвигателя  .
.
Формулы (1), (3), (4) не учитывают условий ухудшения охлаждения у двигателей с сопротивлением во время пауз и при снижении скорости. Для учёта этого параметра можно пользоваться более точной формулой экв.тока:
 (5)
(5)
Где  = 0,5 – коэффициент, учитывающий ухудшение условий охлаждения в процессе разгона и торможения двигателя
= 0,5 – коэффициент, учитывающий ухудшение условий охлаждения в процессе разгона и торможения двигателя
 = 0,8 – 1,0 – коэффициент учитывающий ухудшение условий охлаждения при работе с постоянной скоростью
= 0,8 – 1,0 – коэффициент учитывающий ухудшение условий охлаждения при работе с постоянной скоростью
= 0,3 – коэффициент учитывающий ухудшение условий охлаждения при стоянке двигателя в течение времени  .
.
Порядок расчёта мощности двигателя зависит от режима его работы.
Продолжительный режим (S1).
1. Определяют мощность производственного механизма, причём если нагрузка за время работы изменяется, то определяют эквивалентную мощность (момент или ток):  , (6) где F – сила, приведённая к валу двигателя, Н; М – момент мопротивления, приведённый к валу двигателя, Нм;
, (6) где F – сила, приведённая к валу двигателя, Н; М – момент мопротивления, приведённый к валу двигателя, Нм;  - номинальная линейная скорость механизма, м/с;
- номинальная линейная скорость механизма, м/с;  - номинальная скорость двигателя,
- номинальная скорость двигателя,  ;
;  - КПД передачи.
- КПД передачи.
2. По каталогу выбирают электродвигатель исходя из условия:  , (7); где
, (7); где  - номинальная мощность электродвигателя по каталогу;
- номинальная мощность электродвигателя по каталогу;  = 1,05 – 1,2 коэффициент запаса, учитывающий погрешности расчёта сил сопротивления.
= 1,05 – 1,2 коэффициент запаса, учитывающий погрешности расчёта сил сопротивления.
3. Электродвигатель при необходимости проверяют на перегрузочную способность по условиям пуска:  (8); где
(8); где  ,
,  - статический и динамический моменты сопротивления, Нм;
- статический и динамический моменты сопротивления, Нм;  - приведённый к валу электродвигателя суммарный момент инерции, кг*
- приведённый к валу электродвигателя суммарный момент инерции, кг*  ;
;  - время пуска. Асинхронные к.з. электродвигатели проверяют по пусковому моменту:
- время пуска. Асинхронные к.з. электродвигатели проверяют по пусковому моменту:  - момент сопротивления при нулевой скорости.
- момент сопротивления при нулевой скорости.
Кратковременный режим (S2).
1. Определяют мощность (момент) нагрузки и время работы электродвигателя. Если нагрузка за время работы изменяется, то определяют эквивалентную мощность (момент).
2. Для некоторых серий электродвигателей указывают допустимую мощность при стандартных значениях продолжительности рабочего периода 10, 30, 60, 90 минут. Если время работы  не совпадает со стандартными, выбирают двигатель по ближайшему большему значению времени работы. Обязательна проверка двигателя по перегрузочной способности.
не совпадает со стандартными, выбирают двигатель по ближайшему большему значению времени работы. Обязательна проверка двигателя по перегрузочной способности.
3. Если двигатель рассчитан на продолжительный режим работы, при кратковременном режиме его можно перегружать. Для качественной оценки возможности перегрузки используют коэффициент механической перегрузки  - отношение мощности нагрузки двигателя в кратковременном режиме
- отношение мощности нагрузки двигателя в кратковременном режиме  к номинальной мощности
к номинальной мощности  в продолжительном режиме
в продолжительном режиме  ; где
; где  – отношение постоянных потерь к номинальным переменным потерям в двигателе
– отношение постоянных потерь к номинальным переменным потерям в двигателе  . Если
. Если  (
( – постоянная времени нагрева), электродвигатель проверяют только по перегрузочной способности.
– постоянная времени нагрева), электродвигатель проверяют только по перегрузочной способности.
Повторно-кратковременный режим (S3)
1. Определяют мощность (момент), время работы и пауз каждой операции в цикле.
2. Строят нагрузочную диаграмму и тахограмму.
3. Если нагрузка переменная, то определяют эквивалентный момент или ток.
4. Определяют относительную продолжительность работы  Где
Где  ,
,  – сумма времени работы и пауз соответственно, если в цикле несколько операций.
– сумма времени работы и пауз соответственно, если в цикле несколько операций.
5. Если  (
( - стандартная относительная продолжительность работы), то при соответствующей (%) выбирают электродвигатель из условия
- стандартная относительная продолжительность работы), то при соответствующей (%) выбирают электродвигатель из условия  ; где
; где  - номинальная мощность двигателя,
- номинальная мощность двигателя,  - мощность двигателя по каталогу при . Если расчётная ПВ не соответствует стандартной, эквивалентную мощность приводят к стандартной по формуле:
- мощность двигателя по каталогу при . Если расчётная ПВ не соответствует стандартной, эквивалентную мощность приводят к стандартной по формуле:  .
.
ИНЖЕНЕРНЫЙ ФАКУЛЬТЕТ
Кафедра физики и электротехники
Лекции
по
электроприводу
Ярославль
2009
Лекция 1. Классификация электроприводов.
Электроприводы, используемые в различных технологических установках, разнообразны по своим функциональным возможностям, схемному и конструктивному исполнению, степени автоматизации, что связано с большим разнообразием рабочих машин.
Электроприводы классифицируются по отдельным признакам:
| Классификационные признаки электроприводов
|
| Число рабочих
Органов проводимых ЭП
| Виду движения ЭД
| Способу соединения двигателя с рабочим органом
| регулируемости
| Основному контролируемому параметру
| Виду управления
|
| индивидуальный
| Вращательное
| редукторный
| Не регулируемый
| Регулируемый по моменту
| С ручным управлением
|
| групповой
| Линейное
| безредукторный
| регулируемый
| Регулируемый по скорости
| С полуавтоматическим
|
| | Многокоординатного движения
| Конструктивно-интегрированный
|
| Регулируемый по положению
| Замкнутой системой автоматического регулирования скорости (САР). С ручным заданием или от системы управления технологическим процессом
|
| С замкнутой САР положения (позиционирования)
|
| С Программным управлением
|
| Следящий
|
Классификация по числу рабочих органов, приводимых движением электроприводом. Электроприводы бывают индивидуальными и групповыми. Если каждый рабочий орган машины приводится в действие своим электроприводом, то он называется индивидуальным – такой привод может быть одно или многодвигательным.
При групповом электроприводе один двигатель приводит в движение несколько рабочих органов. При этом усложняется кинематическая цепь рабочей машины и затрудняется управление рабочими органами, как для рационального управление рабочими органами необходимо применять специальные механические устройства – управление муфты, коробки передач, фрикционная.
По мере развития техники групповой электропривод всё больше вытесняется индивидуальными.
Классификация по виду движения электродвигателя. Наибольшее применение получили электроприводы вращательного движения. Сейчас значительное внимание уделяется линейным двигателям. В тех механизмах, где рабочий орган совершает поступательное или возвратно-поступательное движение, применение линейных двигателей конструктивно гораздо удобнее, чем использование специальных кинематических пар: винт-гайка, кривошипно-шатунный механизм. Из-за низких энергетических и массогабаритных показателей линейные электродвигатели не находили применения. Создание новых конструкций линейных двигателей с питанием от полупроводниковых преобразователей частоты достигли новых возможностей применения для металлорежущих станков.
Многокоординатные электроприводы на основе специальных шаговых электродвигателей являются отечественной разработкой и находят применение в высокоточных робототехнических установках, сборочных автоматах. Многокоординатные электроприводы позволяют осуществлять пространственные движения рабочего органа по нескольким координатам.
Классификация по способу соединения двигателя к рабочим органам. Электродвигатели соединяются с рабочим органом машины либо непосредственно, либо редуктором или другую кинематическую передачу.
Непосредственное соединение двигателя с рабочим органом характерно для высокоскоростных рабочих машин, например, насосов и вентиляторов. У тех машин, где скорость рабочего органа меньше номинальной скорости электродвигателя, применяют редукторы, которые снимают скорость и увеличивают момент на валу рабочего органа.
Для высокоточных механизмов и машин, работающих динамичных в динамичных режимах, стремятся исключать механические передачи между валом двигателя и рабочим органом.
Также электроприводы называют безредукторными. При этом возрастают, габаритны размеры и масса приводного двигателя, поскольку эти параметры при одной и той же мощности двигателя примерно обратно пропорциональны номинальной скорости двигателя. Для точных электропривода конструктивно объединяют в последние годы рабочим органом с приводным электродвигателем (электрошпиндель для шлифовальных станков, мотор-колеса для транспортных средств). Новые направления - мехатронные модули – электромеханических модулей, включающих в себя рабочий орган, электротехническое устройство (двигатель) с системой его регулирования микропроцессорная управляющее устройство (роботы и станки с ЧПУ)
Классификация по регулируемости. Под регулируемостью понимается возможность изменения или точного поддержания скорости ускорения или момента (усилия) приводного электродвигателя.
Исторически сложилось, что большинство существующих электроприводов выполнено на базе К3 асинхронных электродвигателей, недопускающих в стандартной схеме их питания регулирования скорости или момента. Модификацией односкоростных асинхронных электродвигателей является двух и трех скоростные двигатели. Электроприводы с многоскоростными двигателями дают возможность получать 2 или 3 одинаковые рабочие скорости, но не могут обеспечить плавного регулирования скорости в заданном диапазоне. К подобным по управляемости можно отнести электроприводы с реостатно-контакторным управлением.
Регулируемый электропривод выполняет следующие функции:
· Установка требуемой скорости в заданном диапазоне.
· Стабилизация установленного значения скорости с заданной точностью при возмущающих воздействиях (изменения нагрузки на валу).
· Регулирование момента, развиваемого двигателем в двигательном и тормозном режимах и ускорения (замедление) привода.
· Формирование требуемого характера изменения скорости во времени  с заданной точностью.
с заданной точностью.
Современная тенденция использовать регулируемый электропривод.
Классификация по основному контролируемому параметру
В зависимости от технических требований электропривод должен осуществлять регулирование по одной из главных контролируемых величин: моменту, скорости или положению рабочего органа машины. Это не означает, что при этом не регулируются другие величины; при регулировании положения необходимо регулировать скорость и т.д.
Регулирование момента как основной регулируемой величины характерным для тех производственных машин, где контролируется напряжение обрабатываемого материала: намоточных устройств, линий обработка ткани... наиболее часто основной контролируемой величиной является скорость.
Для механизмов главного движения станков, клетей прокатных станов, конвекторов, питателей, насосов и множество других машин в соответствии с технологическим процессом требуется регулирование скорости. Есть механизмы, для которых необходимо позиционирование рабочего органа или перемещение его по заданной траектории. Такие электроприводы управляются по положению. В зависимости от диапазона регулирования скорости различают следующие регулируемые электроприводы:
· с ограниченным диапазоном регулирования (не более 2:1)
· общего назначения с диапазоном регулирования (не выше 100:1)
· широко регулируемые (диапазон регулируемой скорости 1000:1)
· высокоточные электроприводы (диапазон регулирования 10000:1 и выше)
Классификация электроприводов по виду управления.
Электроприводы с системами управления различаются по их функциональным возможностям и сложности.
Наиболее простые системы с ручным управлением характерных для нерегулируемых электроприводов. Такие электроприводы имеют систему управления на основе релейно-контакторной аппаратуры, выполняющей функции пуска, останова, защиты и блокировки.
В электроприводах с полуавтоматическим управлением предполагается управление электроприводом оператором с помощью командоконтроллера, кнопок управления и других аппаратов. Система управления содержит элементы автоматического управления и регулирования, обеспечивающие автоматическое изменение параметров электропривода (переключение ступеней сопротивления пускового реостата в функции тока или времени) в соответствии с командами оператора (электропривод грузоподъемных кранов).
Для регулируемого электропривода используются замкнутые САР по току и скорости. В этом случае управление может осуществляться операторами (машинистами экскаваторов, прокатных станов) Задание на скорость может осуществляться системой технологической автоматики (бумагоделательные машины, дозаторы) Одной из разновидностей являются позиционные электроприводы, которые обеспечивают точные останов рабочего органа механизма в заданном положении. Системы управления такими приводами содержат замкнутый контур положения, действующий постоянно или при в ходе рабочего органа в зону точного останова.
Если задающее воздействие на параметры движения рабочего органа формируется программными средствами, то такие электроприводы называют электроприводами с числовым программным управлением (ЧПУ), приводы с ЧПУ содержат замкнутые контуры регулирования по скорости и положению.
Если положение рабочего органа должно изменяться в соответствии с заданием, характер которого заранее неизвестен, то функцией электропривода в этом случае является слежение и отработка этого задания с необходимой точностью. Такой электропривод называют следящим.
Электропривод является электротехнической системой, служащей для преобразования электрической энергии в механическую, которая необходима для осуществления различных технологических процессов в различных сферах деятельности человека.
Однако функция электропривода не ограничиваются только преобразованием энергии. Вторую функцию электропривода можно определить как управление движение






