Московский Государственный Технический Университет
имени Н.Э. Баумана
Факультет “Робототехники и комплексной автоматизации”
Кафедра “Теории механизмов и машин”
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовому проекту на тему:
“Проектирование и исследование механизмов движения гусеничной машины”
Задание №18Д
Студент ___________________ (Кравцов М. А.) Группа РК9-51
Руководитель проекта __________________ (Сащенко Д.В.)
2017
Реферат
Пояснительная записка к курсовому проекту "Проектирование и исследование механизмов движения гусеничной машины" содержит 40 страницу машинописного текста, 10 рисунков, 3 таблицы, 6 приложений.
Данная записка содержит:
1) Определение закона движения;
2) Кинетостатический силовой расчет основного рычажного механизма;
3)Анализ и расчет зубчатой передачи, кинематический синтез однорядного планетарного зубчатого механизма;
4) Расчет параметров кулачкового механизма с поступательно движущимся толкателем.
5)Дополнительное задание.
Расчеты были получены при помощи программ MathCAD, Diada, ZZZ3, «Синтез зубчатого и планетарного редуктора».
Полученные данные приведены в разделе Приложение 1, 2, 3, 4, 5, 6.
Содержание
Реферат …………………………………………………………………………………..………2
Техническое задание ……………………………………………………………………...……5
Исходные данные …………………………………………………………………………….....6
1.Анализ работы и структуры данной машины ……………………………………………9
1.1. Особенностей данной машины…………………………………………………………...9
1.2. Функциональная схема гусеничной машины………………………………………….10
2. Проектирование основного механизма гусеничной машины и определения закона его движения ………………………………………………………………………………..….11
2.1. Структурный анализ механизма………………………………………………………..11
2.2. Построение кинематической схемы механизма……………………………………….13
2.3.Определение кинематических передаточных функций за цикл работы механизма и построение графиков аналогов скоростей…………………………………………………….14
2.4.Выбор динамической модели и определение её параметров………………………….15
2.5.Построение графиков приведенных моментов инерции звеньев II группы…………16
2.6.Определение суммарного приведенного момента……………………………………..16
2.7.Определение суммарной работы………………………………………………………...17
2.8.Определение кинетической энергии II группы звеньев……………………………….17
2.9.Определение кинетической энергии I группы звеньев………………………………..18
2.10.Определение угловой скорости и углового ускорения звена приведения………….18
2.11. Определение размеров и массы маховика…………………………………………….19
3.Силовой расчет механизма ……………………………...…………………………………20
3.1. Исходные данные для расчета…………………………………………………………..20
3.2. Нахождение ускорений звеньев в заданном положении……………………………...20
3.3. Определение сил тяжести, сил и моментов инерции, действующих на звенья…….21
3.4. Определение реакций в кинематических парах……………………………………….22
4. Проектирование зубчатой передачи механизма ………………………………………..27
4.1Исходные данные…………………………………………………………………………27
4.2.Исходный производящий контур инструмента и станочное зацепление…………….27
4.3 Расчет зубчатой передачи на ЭВМ……………………………………………………...28
4.4 Выбор коэффициентов смещения……………………………………………………….28
4.5. Проектирование зубчатого зацепления шестерни с колесом…………………………29
5. Проектирование планетарного редуктора ………………………………..…………….30
5.1 Исходные данные………………………………………………………………………..30
5.2 Синтез планетарного механизма………………………………………………………...30
5.3. Кинематический анализ планетарного механизма методом Л. П. Смирнова………31
6.Проектирование кулачкового механизма ……………………………...………………..33
6.1.Исходные данные…………………………………………………………………………33
6.2 Определение закона движения толкателя………………………………………………34
6.3.Определение основных размеров кулачкового механизма по условию ограничения угла давления…………………………………………………………………………………...35
6.4.Определение формы профиля кулачка…………………………………………………36
6.5 График угла давления……………………………………………………………………37
7.Дополнительное задание …………………………………………………………...………38
Заключение …………………………………………………………………...………………..39
Список литературы …………………………………………………….……………………..40
Приложение 1
Приложение 2
Приложение 3
Приложение 4
Приложение 5
Приложение 6
Техническое задание
Гусеничными машинами могут быть тракторы, снегоходы, самоходные артиллерийские установки, танки, автомобили, мотоциклы и т.д. при наличии у них гусеничного хода.
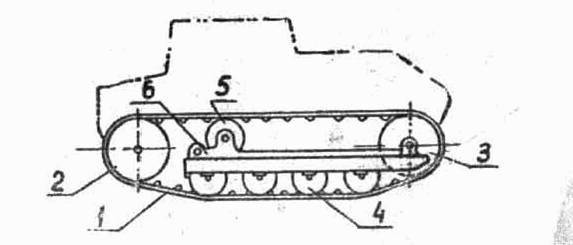
Рис. 1. Общий вид гусеничной машины.
Гусеничный ход имеет: гусеницы 1, представляющие собой две бесконечные шарнирные цепи, которые взаимодействуют с грунтом и делают возможным движение машины по бездорожью; ведущие колеса 2, перемещающие корпус машины относительно гусениц; направляющие колеса 3, опорные 4 и поддерживающие 5 катки, служащие для направления и поддержания гусениц; подвески 6, соединяющие корпус машины с опорными катками.
Механизм движения гусеничной машины состоит из двигателя внутреннего сгорания 1, муфты сцепления 2, коробки передач 3, механизмов поворота 4 и бортовых передач 5. Гусеничная машины имеет четырехтактный четырехцилиндровый двигатель внутреннего сгорания с вертикальным рядным расположением цилиндров.

Рис. 2. Схема расположения механизмов гусеничной машины.
Исходные данные
Таблица 1
| Наименование параметра
| Обозначение
| Размерность
| Числовые значения
|
| Средняя скорость поршня
| VBср
| м/сек
| 7.50
|
| Отношение длины шатуна к длине кривошипа
| 
| -
| 3.6
|
| Отношение расстояния от точки A до центра тяжести S2 шатуна к общей длине шатуна
| 
| -
| 0.32
|
| Диаметр цилиндра
| d
| м
| 0.160
|
| Число оборотов коленчатого вала при номинальной нагрузке
| n1ном
| об/мин
| 1500
|
| Число оборотов коленчатого вала при холостом ходе
| n1хх
| об/мин
| 600
|
| Максимальное давление в цилиндре двигателя при номинальной нагрузке
| (pmax)ном
| Па
| 6000000
|
| Максимальное давление в цилиндре двигателя при холостом ходе
| (pmax)хх
| Па
| 4300000
|
| Вес шатуна
| G2
| Н
| 62
|
| Вес поршня
| G3
| Н
| 89
|
| Момент инерции шатуна относительно оси, проходящей через его центр тяжести
| I2S
| кг* 
| 0.09
|
| Момент инерции коленчатого вала (без маховика)
| I’10
| кг*
| 0.19
|
| Коэффициент неравномерности вращения коленчатого вала при холостом ходе двигателя
| δ
| -
| 1/35
|
| Угловая координата кривошипа для силового расчета
| φ1
| град
| 90
|
| Эффективная мощность двигателя при номинальной нагрузке
| Ne ном
| Вт
| 125000
|
| Механический к.п.д. двигателя
| η
| -
| 0.8
|
| Приведенный к валу двигателя момент инерции вращающихся деталей привода гусениц
| I0пр
| кг*
| 8
|
| Ход толкателя кулачкового механизма
| h
| м
| 0.011
|
| Максимально допустимый угол давления в кулачковом механизме
| aдоп
| град
| 28
|
| Угол рабочего профиля кулачка выпускного клапана
| dраб
| град
| 123
|
| Угол рабочего профиля кулачка впускного клапана
| d’раб
| град
| 110
|
| Соотношение величин ускорений толкателя
| n=a1/a2
| -
| 2.2
|
| Межосевое расстояние зубчатой передачи z3, z4
| A
| м
| 0.089
|
| Модуль зубчатых колес 3 и 4
| m
| м
| 0.045
|
| Число зубьев колес 3 и 4
| z3
z4
| -
-
| 18
26
|
| Передаточное отношение бортового редуктора
iобщ=i3-4*iпр
| iобщ
| -
| 10
|
| Число сателлитов в планетарном редукторе
| k
| -
| 3
|
| Параметры исходного контура реечного инструмента
| a0
cи
cс
| град
-
-
| 20
1
0.25
|
Значения давления в цилиндре двигателя в долях максимального давления(p/(pmax)ном) в зависимости от положения поршня(SB/H) в режиме холостого хода.
Таблица 2
| Путь поршня
| Всасывание
| Сжатие
| Расширение
| Выхлоп
|
| 0
| 0.025
| 0.92
| 0.92
| 0.025
|
| 0.025
| 0
| 0.60
| 1.00
| 0.025
|
| 0.05
| -0.025
| 0.40
| 0.9
| 0.025
|
| 0.1
| -0.025
| 0.30
| 0.60
| 0.025
|
| 0.2
| -0.025
| 0.13
| 0.36
| 0.025
|
| 0.3
| -0.025
| 0.059
| 0.26
| 0.025
|
| 0.4
| -0.025
| 0.032
| 0.18
| 0.025
|
| 0.5
| -0.025
| 0.015
| 0.14
| 0.025
|
| 0.6
| -0.025
| 0
| 0.104
| 0.025
|
| 0.7
| -0.025
| -0.004
| 0.090
| 0.025
|
| 0.8
| -0.025
| -0.008
| 0.065
| 0.025
|
| 0.9
| -0.025
| -0.016
| 0.052
| 0.025
|
| 1.0
| -0.025
| -0.025
| 0.044
| 0.044
|
Особенностей данной машины
Различают два режима работы двигателя: холостой ход, когда муфта сцепления выключена, и рабочий процесс при номинальной нагрузке, когда муфта сцепления включена и соединяет двигатель с остальными механизмами машины. Рабочий цикл в каждом цилиндре двигателя совершается за два оборота коленчатого вала и характеризуется индикаторными диаграммами, показывающими изменение давления газов в каждом цилиндре в зависимости от положения поршня при рабочем ходе и холостом ходе.
Данные для построения индикаторных диаграмм приведены в соответствующей таблице.
Основной механизм двигателя состоит из четырех кривошипно-ползунных механизмов, расположенных в параллельных плоскостях и приводимых в движение от одного коленчатого вала 1. Кривошипы механизмов I и IV совпадают по своему расположению, кривошипы механизмов II и III также совпадают, но по отношению к кривошипам механизмов I и IV повернуты на угол 180 градусов.
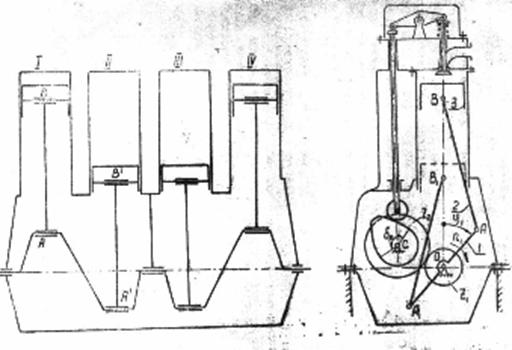
Рис. 3. Схема основного механизма двигателя и кулачкого механизма клапана.
Силовой расчет механизма
Задача силового расчёта: определить реакции в кинематических парах механизма и движущий момент на входном звене механизма, при известных моменте сопротивления и кинематических характеристиках.
При силовом расчете механизмов используется кинетостатический метод: в любой момент времени для всякой несвободной механической системы геометрическая сумма главных векторов внешних сил, реакций связей и сил инерции материальных точек системы равна нулю и геометрическая сумма главных моментов внешних сил, реакций связей и сил инерции материальных точек системы относительно любого неподвижного центра также равна нулю.
Исходные данные для расчета.
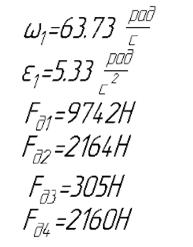
Положение механизма задается угловой координатой  начального звена 1. Угловую скорость и угловое ускорение, соответствующие координате силового расчета, а также значение движущих сил берется с первого листа проекта:
начального звена 1. Угловую скорость и угловое ускорение, соответствующие координате силового расчета, а также значение движущих сил берется с первого листа проекта:
Исходные данные
Число зубов шестерни  ;
;
Число зубов колеса  ;
;
Модуль зубчатых колес m = 4.5 мм;
Межосевое расстояние 
Передаточное отношение зубчатой передачи: 
Число сателлитов в планетарном редукторе k = 3;
При проектировании зубчатой передачи существенную роль играет выбор её геометрических параметров. Расчет параметров зубчатой передачи выполняют при условии, что модуль зацепления m зубчатых колес получен из расчета зубьев на прочность.
Исходные данные
Однорядный планетарный редуктор.
Общее передаточное отношение  =10;
=10;
Передаточное отношение планетарного редуктора: 
Число сателлитов k =3
Модуль зубчатых колес m=1
Колеса планетарного редуктора нулевые
Параметры исходного реечного инструмента стандартные
5.2 Синтез планетарного механизма
Задачей синтеза является подбор числа зубьев колес планетарного редуктора так, чтобы выполнялись все пункты синтеза, такие как:
1) Отсутствие подрезания – zi>17
2) Точность выполнения заданного передаточного отношения: 0.95U1hзад<U1hпол<1.05U1hзад
3) Условие соосности: rw20+rw21=rw22-rw21.
4) Условие соседства – вершины зубьев сателлитов не должны соприкоснуться (рис.4.4).



Условие соседства: 
Рис. 8. Проектирование
планетарного редуктора
Для стандартного реечного инструмента 
5) Условие сборки. Пусть нам надо собрать редуктор, у которого k сателлитов. После установки первого зубья эпицикла и солнечной шестерни определенным образом ориентируются друг относительно друга, и может так случится, что остальные сателлиты установить будет невозможно.

6) Условие минимальности габаритов. Радиус корпуса для редуктора определяется суммой радиусом rw22.
Мы воспользовались программой «Синтез зубчатого и планетарного редуктора», она учитывает все эти пункты, кроме минимальности габаритов, выдает множество разных вариантов чисел зубьев, и мы выбираем вариант, с минимальным числом так, чтобы передаточное отношение было максимально близко к заданному.
Результаты приведены в Приложении 4
5.3. Кинематический анализ планетарного механизма методом Л. П. Смирнова
Целью графического метода является определение линейных скоростей и нахождения с их помощью угловых скоростей звеньев, а также определение передаточного отношения механизма.
Зададим отрезок  , изображающий скорость в точке
, изображающий скорость в точке  , тогда закон распределения скоростей изобразится линией
, тогда закон распределения скоростей изобразится линией  (5), а
(5), а  (6) – закон распределения линейных скоростей солнечного колеса и сателлита. Проведем отрезок
(6) – закон распределения линейных скоростей солнечного колеса и сателлита. Проведем отрезок  до пересечения с прямой - скорость точки
до пересечения с прямой - скорость точки  , тогда закон распределения линейных скоростей водила -
, тогда закон распределения линейных скоростей водила -  (Н). Проведем отрезок
(Н). Проведем отрезок  , где точка А’’- точка пересечения (Н) и . Тогда передаточное отношение планетарного редуктора:
, где точка А’’- точка пересечения (Н) и . Тогда передаточное отношение планетарного редуктора:

Погрешность:

Исходные данные
1) Структурная схема приведена в разделе «Исходные данные» (см. рис.2-3.). В данном случае толкатель совершает поступательное движение.
2) Фазовые углы:
рабочий угол профиля кулачка: 
фаза удаления: 
фаза дальнего стояния: 
фаза сближения: 
3) Закон движения толкателя в виде графика изменения ускорения толкателя в зависимости от угла поворота кулачка

Рис. 9 Закон изменения толкателя кулачкового механизма
4) Допустимое значение угла давления 
График угла давления
Для проверки условия отсутствия заклинивания в каждом положении механизма строится график изменения угла давления от угла поворота кулачка.
Построение графика производится для фазы удаления ( ) толкателя, так как только для этой фазы существует угол давления, и только на фазе удаления, данный кулачковый механизм может заклинить.
) толкателя, так как только для этой фазы существует угол давления, и только на фазе удаления, данный кулачковый механизм может заклинить.
Однако, т.к. кулачок реверсивный, то фаза удаления при одном направлении вращения кулачка становится фазой сближения при его обратном направлении вращения. Соответственно, при обратном направлении вращения фазой удаления будет фаза сближения прямого направления. Поэтому для обратного направления вращения следует строить свой график углов давления, ограничиваясь только фазой удаления обратного направления вращения.
Как видно из графика при любом положении кулачка, текущий угол давления  меньше или равен максимально допустимому углу давления
меньше или равен максимально допустимому углу давления  , следовательно, заклинивания не произойдёт.
, следовательно, заклинивания не произойдёт.
7.Дополнительное задание
Как изменится динамика машины, если выйдет из строя один из цилиндров?
Все результаты приведены в Приложении 6.
Заключение
В ходе выполнения курсового проекта получены следующие результаты:
1. Спроектирована кинематическая схема и определены длины звеньев механизма:
 ; определены угловая скорость, закон движения
; определены угловая скорость, закон движения 

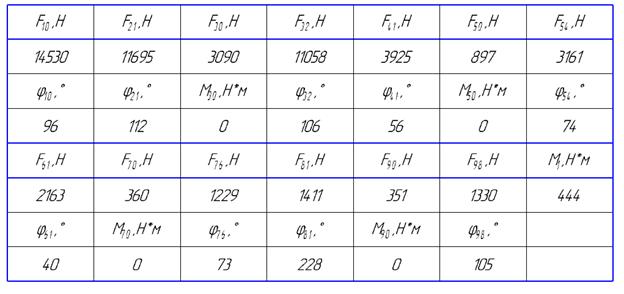
2. Определены силовые воздействия на звенья механизм, рассчитаны усилия в кинематических парах.
Результаты силового расчета (силы в Н, момент в Н*м) представлен в таблице:
3. Спроектирована эвольвентная зубчатая передача:  с числом зубьев колес z1=16 и z2=23, модулем m=4.5 мм, коэффициентами смещения х1=0.4 и х2=-0.11.
с числом зубьев колес z1=16 и z2=23, модулем m=4.5 мм, коэффициентами смещения х1=0.4 и х2=-0.11.
Спроектирован однорядный планетарный редуктор с передаточным отношением  с числами зубьев колес z5 =19, z6 =47, z7 =113.
с числами зубьев колес z5 =19, z6 =47, z7 =113.
4.
5. Спроектирован кулачковый механизм с поступательно движущимся роликовым толкателем. Определены основные размеры кулачка: радиус кулачка 
 эксцентриситет
эксцентриситет  радиус ролика
радиус ролика 
Список литературы
1. Теория механизмов и машин. Курсовое проектирование: учеб. пособие для вузов / Кузенков В.В., Самойлова М.В., Тарабарин В.Б. [и др.]; ред. Тимофеев Г.А., Умнов Н.В. - 2-е изд., перераб. и доп. - М.: Изд-во МГТУ им. Н. Э. Баумана, 2012. - 169 с.: ил. - Библиогр.: с. 167. - ISBN 978-5-7038-3569-2.
2. Попов С.А., Тимофеев Г.А. Курсовое проектирование по теории механизмов и механике машин: учеб. пособие для втузов / Попов С.А., Тимофеев Г.А.; ред. Фролов К.В. - 6-е изд., стер. - М.: Высш. шк., 2008. - 456 с.: ил. - ISBN 978-5-06-005952-6.
Московский Государственный Технический Университет
имени Н.Э. Баумана
Факультет “Робототехники и комплексной автоматизации”
Кафедра “Теории механизмов и машин”
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовому проекту на тему:
“Проектирование и исследование механизмов движения гусеничной машины”
Задание №18Д
Студент ___________________ (Кравцов М. А.) Группа РК9-51
Руководитель проекта __________________ (Сащенко Д.В.)
2017
Реферат
Пояснительная записка к курсовому проекту "Проектирование и исследование механизмов движения гусеничной машины" содержит 40 страницу машинописного текста, 10 рисунков, 3 таблицы, 6 приложений.
Данная записка содержит:
1) Определение закона движения;
2) Кинетостатический силовой расчет основного рычажного механизма;
3)Анализ и расчет зубчатой передачи, кинематический синтез однорядного планетарного зубчатого механизма;
4) Расчет параметров кулачкового механизма с поступательно движущимся толкателем.
5)Дополнительное задание.
Расчеты были получены при помощи программ MathCAD, Diada, ZZZ3, «Синтез зубчатого и планетарного редуктора».
Полученные данные приведены в разделе Приложение 1, 2, 3, 4, 5, 6.
Содержание
Реферат …………………………………………………………………………………..………2
Техническое задание ……………………………………………………………………...……5
Исходные данные …………………………………………………………………………….....6
1.Анализ работы и структуры данной машины ……………………………………………9
1.1. Особенностей данной машины…………………………………………………………...9
1.2. Функциональная схема гусеничной машины………………………………………….10
2. Проектирование основного механизма гусеничной машины и определения закона его движения ………………………………………………………………………………..….11
2.1. Структурный анализ механизма………………………………………………………..11
2.2. Построение кинематической схемы механизма……………………………………….13
2.3.Определение кинематических передаточных функций за цикл работы механизма и построение графиков аналогов скоростей…………………………………………………….14
2.4.Выбор динамической модели и определение её параметров………………………….15
2.5.Построение графиков приведенных моментов инерции звеньев II группы…………16
2.6.Определение суммарного приведенного момента……………………………………..16
2.7.Определение суммарной работы………………………………………………………...17
2.8.Определение кинетической энергии II группы звеньев……………………………….17
2.9.Определение кинетической энергии I группы звеньев………………………………..18
2.10.Определение угловой скорости и углового ускорения звена приведения………….18
2.11. Определение размеров и массы маховика…………………………………………….19
3.Силовой расчет механизма ……………………………...…………………………………20
3.1. Исходные данные для расчета…………………………………………………………..20
3.2. Нахождение ускорений звеньев в заданном положении……………………………...20
3.3. Определение сил тяжести, сил и моментов инерции, действующих на звенья…….21
3.4. Определение реакций в кинематических парах……………………………………….22
4. Проектирование зубчатой передачи механизма ………………………………………..27
4.1Исходные данные…………………………………………………………………………27
4.2.Исходный производящий контур инструмента и станочное зацепление…………….27
4.3 Расчет зубчатой передачи на ЭВМ……………………………………………………...28
4.4 Выбор коэффициентов смещения……………………………………………………….28
4.5. Проектирование зубчатого зацепления шестерни с колесом…………………………29
5. Проектирование планетарного редуктора ………………………………..…………….30
5.1 Исходные данные………………………………………………………………………..30
5.2 Синтез планетарного механизма………………………………………………………...30
5.3. Кинематический анализ планетарного механизма методом Л. П. Смирнова………31
6.Проектирование кулачкового механизма ……………………………...………………..33
6.1.Исходные данные…………………………………………………………………………33
6.2 Определение закона движения толкателя………………………………………………34
6.3.Определение основных размеров кулачкового механизма по условию ограничения угла давления…………………………………………………………………………………...35
6.4.Определение формы профиля кулачка…………………………………………………36
6.5 График угла давления……………………………………………………………………37
7.Дополнительное задание …………………………………………………………...………38
Заключение …………………………………………………………………...………………..39
Список литературы …………………………………………………….……………………..40
Приложение 1
Приложение 2
Приложение 3
Приложение 4
Приложение 5
Приложение 6
Техническое задание
Гусеничными машинами могут быть тракторы, снегоходы, самоходные артиллерийские установки, танки, автомобили, мотоциклы и т.д. при наличии у них гусеничного хода.
Рис. 1. Общий вид гусеничной машины.
Гусеничный ход имеет: гусеницы 1, представляющие собой две бесконечные шарнирные цепи, которые взаимодействуют с грунтом и делают возможным движение машины по бездорожью; ведущие колеса 2, перемещающие корпус машины относительно гусениц; направляющие колеса 3, опорные 4 и поддерживающие 5 катки, служащие для направления и поддержания гусениц; подвески 6, соединяющие корпус машины с опорными катками.
Механизм движения гусеничной машины состоит из двигателя внутреннего сгорания 1, муфты сцепления 2, коробки передач 3, механизмов поворота 4 и бортовых передач 5. Гусеничная машины имеет четырехтактный четырехцилиндровый двигатель внутреннего сгорания с вертикальным рядным расположением цилиндров.
Рис. 2. Схема расположения механизмов гусеничной машины.
Исходные данные
Таблица 1
| Наименование параметра
| Обозначение
| Размерность
| Числовые значения
|
| Средняя скорость поршня
| VBср
| м/сек
| 7.50
|
| Отношение длины шатуна к длине кривошипа
|
| -
| 3.6
|
| Отношение расстояния от точки A до центра тяжести S2 шатуна к общей длине шатуна
|
| -
| 0.32
|
| Диаметр цилиндра
| d
| м
| 0.160
|
| Число оборотов коленчатого вала при номинальной нагрузке
| n1ном
| об/мин
| 1500
|
| Число оборотов коленчатого вала при холостом ходе
| n1хх
| об/мин
| 600
|
| Максимальное давление в цилиндре двигателя при номинальной нагрузке
| (pmax)ном
| Па
| 6000000
|
| Максимальное давление в цилиндре двигателя при холостом ходе
| (pmax)хх
| Па
| 4300000
|
| Вес шатуна
| G2
| Н
| 62
|
| Вес поршня
| G3
| Н
| 89
|
| Момент инерции шатуна относительно оси, проходящей через его центр тяжести
| I2S
| кг*
| 0.09
|
| Момент инерции коленчатого вала (без маховика)
| I’10
| кг*
| 0.19
|
| Коэффициент неравномерности вращения коленчатого вала при холостом ходе двигателя
| δ
| -
| 1/35
|
| Угловая координата кривошипа для силового расчета
| φ1
| град
| 90
|
| Эффективная мощность двигателя при номинальной нагрузке
| Ne ном
| Вт
| 125000
|
| Механический к.п.д. двигателя
| η
| -
| 0.8
|
| Приведенный к валу двигателя момент инерции вращающихся деталей привода гусениц
| I0пр
| кг*
| 8
|
| Ход толкателя кулачкового механизма
| h
| м
| 0.011
|
| Максимально допустимый угол давления в кулачковом механизме
| aдоп
| град
| 28
|
| Угол рабочего профиля кулачка выпускного клапана
| dраб
| град
| 123
|
| Угол рабочего профиля кулачка впускного клапана
| d’раб
| град
| 110
|
| Соотношение величин ускорений толкателя
| n=a1/a2
| -
| 2.2
|
| Межосевое расстояние зубчатой передачи z3, z4
| A
| м
| 0.089
|
| Модуль зубчатых колес 3 и 4
| m
| м
| 0.045
|
| Число зубьев колес 3 и 4
| z3
z4
| -
-
| 18
26
|
| Передаточное отношение бортового редуктора
iобщ=i3-4*iпр
| iобщ
| -
| 10
|
| Число сателлитов в планетарном редукторе
| k
| -
| 3
|
| Параметры исходного контура реечного инструмента
| a0
cи
cс
| град
-
-
| 20
1
0.25
|
Значения давления в цилиндре двигателя в долях максимального давления(p/(pmax)ном) в зависимости от положения поршня(SB/H) в режиме холостого хода.
Таблица 2
| Путь поршня
| Всасывание
| Сжатие
| Расширение
| Выхлоп
|
| 0
| 0.025
| 0.92
| 0.92
| 0.025
|
| 0.025
| 0
| 0.60
| 1.00
| 0.025
|
| 0.05
| -0.025
| 0.40
| 0.9
| 0.025
|
| 0.1
| -0.025
| 0.30
| 0.60
| 0.025
|
| 0.2
| -0.025
| 0.13
| 0.36
| 0.025
|
| 0.3
| -0.025
| 0.059
| 0.26
| 0.025
|
| 0.4
| -0.025
| 0.032
| 0.18
| 0.025
|
| 0.5
| -0.025
| 0.015
| 0.14
| 0.025
|
| 0.6
| -0.025
| 0
| 0.104
| 0.025
|
| 0.7
| -0.025
| -0.004
| 0.090
| 0.025
|
| 0.8
| -0.025
| -0.008
| 0.065
| 0.025
|
| 0.9
| -0.025
| -0.016
| 0.052
| 0.025
|
| 1.0
| -0.025
| -0.025
| 0.044
| 0.044
|
Анализ работы и структуры данной машины
Особенностей данной машины
Различают два режима работы двигателя: холостой ход, когда муфта сцепления выключена, и рабочий процесс при номинальной нагрузке, когда муфта сцепления включена и соединяет двигатель с остальными механизмами машины. Рабочий цикл в каждом цилиндре двигателя совершается за два оборота коленчатого вала и характеризуется индикаторными диаграммами, показывающими изменение давления газов в каждом цилиндре в зависимости от положения поршня при рабочем ходе и холостом ходе.
Данные для построения индикаторных диаграмм приведены в соответствующей таблице.
Основной механизм двигателя состоит из четырех кривошипно-ползунных механизмов, расположенных в параллельных плоскостях и приводимых в движение от одного коленчатого вала 1. Кривошипы механизмов I и IV совпадают по своему расположению, кривошипы механизмов II и III также совпадают, но по отношению к кривошипам механизмов I и IV повернуты на угол 180 градусов.
Рис. 3. Схема основного механизма двигателя и кулачкого механизма клапана.





