Задача кинематики – определение движения звеньев механизма независимо от действующих на них сил. Назначение кинематической схемы – датьнаглядное и точное представление о передаче и преобразовании движения звеньями механизма. Кинематическая схема строится для наиболее характерныхположений цикла движения механизма, в том числе для двух крайних – включенного и отключенного положения аппарата. Одним из характерных положений коммутационных аппаратов является момент касания коммутирующихконтактов.
На кинематической схеме в условных обозначениях изображаются всезвенья и кинематические пары механизма, указывается их взаимное расположение и связь с другими частями аппарата. На схеме по возможности указываются основные данные, характеризующие кинематику механизма:
- величина хода или угла поворота ведомого и ведущего звеньев;
- теоретические длины плеч, передаточные отношения;
- расположение и направление векторов сил или моментов сил (величинысил и моментов определяются при силовом расчете);
- прочие данные, например, у электромагнитных механизмов – рабочий воздушный зазор, у механизмов коммутирующих контактов – раствор, провал,проскальзывание и перекатывание подвижного контакта.
В электромагнитном контакторе действуют как движущие, так и противодействующие силы. Силы и пары сил (моменты) разделяются на следующиевиды:
- движущие силы или пары сил приводного электромагнитного, пружинного,электродвигательного и других механизмов. Эти силы приложены к ведущему звену.
- силы полезных сопротивлений. У коммутационных аппаратов – силы нажатия контактов, осуществляемые пружинами.
- силы вредных сопротивлений. Это силы трения в кинематических парах(шарнирах, направляющих и др.), силы гидродинамического сопротивления(например, при движении звена механизма в масле), силы давления газа вкамере дугогасительного устройства.
- силы тяжести. Действие этих сил может быть как полезным, так и вредным.
- электродинамические силы. Эти силы становятся значительными при больших токах, например токах короткого замыкания, и их необходимо учитывать. Электродинамические силы могут быть полезными и вредными.
- силы и моменты сил инерции. Эти силы возникают при неустановившемся движении механизма
– при движении звеньев с ускорением и замедлением.Силы инерции совершают положительную и отрицательную работу, в зависимости от их направления. За период цикла движения механизма работасил инерции равна нулю. При построении статической характеристики онане учитывается.
- силы реакции в кинематических парах.
Характеристика противодействующих сил
Расчёт силы начального сжатия контактных пружин всех полюсов
На рисунке 4.6.1 приведены типовые конструктивные схемы электромагнитно-пружинных механизмов контакторов постоянного тока, а также соответствующие им кинематические схемы во включенном состоянии контактора, когда  . Якорь 11 электромагнита может перемещаться относительно оси вращения О под действием либо электромагнитной силы
. Якорь 11 электромагнита может перемещаться относительно оси вращения О под действием либо электромагнитной силы  , либо силы
, либо силы  возвратной пружины и силы
возвратной пружины и силы  контактной пружины. Кроме этого, контактодержатель 7 с подвижным контактом 5 имеет возможность вращения на призме 10. Такое техническое решение позволяет создать усилие на главных контактах 2 и 5 при провале
контактной пружины. Кроме этого, контактодержатель 7 с подвижным контактом 5 имеет возможность вращения на призме 10. Такое техническое решение позволяет создать усилие на главных контактах 2 и 5 при провале  контактов.
контактов.
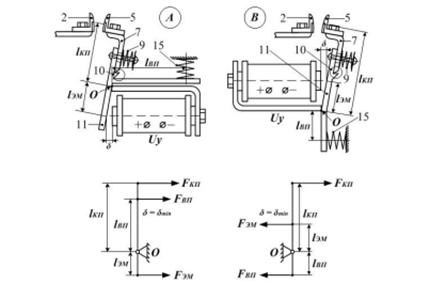
Рисунок 4.6.1. Типовые конструктивные схемы электромагнитно-пружинных механизмов контактов А, В. Ниже – соответствующие им кинематические схемы во включенном состоянии контактора ()
Якорь электромагнита притянут к его сердечнику под действием силы на плече  приложения электромагнитной силы. При этом образоваласьсила нажатия контактной пружины (сила контактного нажатия) на плече
приложения электромагнитной силы. При этом образоваласьсила нажатия контактной пружины (сила контактного нажатия) на плече  . Кроме этого, силе противодействуют сила возвратной пружины на плече
. Кроме этого, силе противодействуют сила возвратной пружины на плече  . Действием сил тяжести и прочими силами (моментами) в расчётепренебрегаем.
. Действием сил тяжести и прочими силами (моментами) в расчётепренебрегаем.
Для выполнения расчётов контактной (притирающей) пружины 9 и возвратной пружины 15 необходимо рассмотреть плечи приложения сил:
- плечо приложения тяговой силы электромагнита (точка О – осьсимметрии сердечника электромагнита);
- плечо приложения силы контактной пружины (точка О – серединаконтактирующей поверхности подвижного главного контакта 5);
- плечо приложения силы возвратной пружины (точка О – серединаопорной площадки возвратной пружины 15).
При относительно небольшом рабочем зазоре электромагнита  , для получения раствора
, для получения раствора  главных коммутирующих контактов, достаточного для уверенного гашения электрической дуги, отношение плеч
главных коммутирующих контактов, достаточного для уверенного гашения электрической дуги, отношение плеч  должно находиться в пределах 1.0 ÷ 1.9.
должно находиться в пределах 1.0 ÷ 1.9.
Действующие силы всех пружин необходимо привести (путем пересчетаплеч) к рабочему зазоруd по оси симметрии сердечника электромагнита, т.е. кместу приложения электромагнитной силы . Приведение сил пружин к рабочему зазору производится для того, чтобы иметь возможность согласоватьдвижущие и противодвижущие силы при включении контактора.
Движение механизма аппарата может рассматриваться как движение поопределенной траектории материальной точки, к которой приводятся все действующие силы, как силы движущие, так и силы сопротивления движению. Этаточка называется точкой приведения, а силы - приведёнными. Пары сил (моменты) также могут быть приведены к одному звену приведения.
Приведенные силы и моменты сил по своему действию должны быть эквивалентны действию движущих сил и моментов. Величина приведенной силы  определяется из условия того, что её работа на возможном перемещенииточки приложения равна работе действительной силы (или момента).
определяется из условия того, что её работа на возможном перемещенииточки приложения равна работе действительной силы (или момента).
В дальнейшем приведённые к рабочему зазоруd значения обозначаютсяс точкой, например приведённое значение силы .
В широко распространённых в электрических аппаратах двухзвенных рычажно-шарнирных механизмах любая сила F, действующая на плече l, можетбыть приведена к точке приложения электромагнитной силы , расположенной на плече , на основании зависимости
 (4.6.1)
(4.6.1)
где  – приведённая к плечу
– приведённая к плечу  сила F.
сила F.
Расчёт полного значения раствора и провала контактов
При полном ходе и провале главного контакта 5 (см. рис. 4.6.1) из одногокрайнего положения (контакты 2 и 5 разомкнуты) во второе крайнее положение(контакты 2 и 5 замкнуты) рабочий зазор d приводного электромагнита изменяется в пределах от  до
до  . Величина раствора коммутирующихконтактов определяется по эмпирической формуле
. Величина раствора коммутирующихконтактов определяется по эмпирической формуле
 (4.6.2)
(4.6.2)

где  – номинальное напряжение главной цепи;
– номинальное напряжение главной цепи;
 – предельный отключаемый ток;
– предельный отключаемый ток;
 – раствор коммутирующих контактов.
– раствор коммутирующих контактов.
Далее вычисляется полное значение (сумма) раствора и провала коммутирующих контактов  :
:
 (4.6.3)
(4.6.3)
где  – полное значение (сумма) раствора и провала коммутирующих контактов;
– полное значение (сумма) раствора и провала коммутирующих контактов;
– раствор коммутирующих контактов;
 – провал коммутирующего контакта, формула (4.3.30).
– провал коммутирующего контакта, формула (4.3.30).
По результатам расчёта s необходимо определить максимальное значение рабочего зазора электромагнита , которое не должно быть больше (10÷ 12 мм). В противном случае, необходимо изменить соотношение плеч в диапазоне 1.0 ÷ 1.9 или применить иную типовую конструктивную схему (А или В) электромагнитно-пружинного механизма контактора в соответствие срисунком 4.6.1.
Рабочий зазор должен иметь минимально возможную длину дляобеспечения расчётного значения s. Это позволит уменьшить габариты, мощность и рабочую температуру электромагнита, исключить вибрацию (дребезг)главных контактов при включении и тем самым увеличить ресурс работы контактора.
 (4.6.4)
(4.6.4)
Где  – расчётная величина рабочего зазора;
– расчётная величина рабочего зазора;
 – величина принятого при расчётах значения соотношения плеч и ;
– величина принятого при расчётах значения соотношения плеч и ;
 – величина, обратная принятому при расчётах значению .
– величина, обратная принятому при расчётах значению .
Далее рассчитывается критический зазор электромагнита  , соответствующий моменту касания главных контактов при движении якоря от положения через точку к конечному значению
, соответствующий моменту касания главных контактов при движении якоря от положения через точку к конечному значению  . Для исключения «залипания» якоря к полюсному наконечнику за счёт остаточной намагниченностипри отключении катушки электромагнита зазор .
. Для исключения «залипания» якоря к полюсному наконечнику за счёт остаточной намагниченностипри отключении катушки электромагнита зазор .
 (4.6.5)
(4.6.5)
Значение силы начального сжатия  контактных пружин всех полюсов p, приведённое к рабочему зазору d, рассчитывается по формуле:
контактных пружин всех полюсов p, приведённое к рабочему зазору d, рассчитывается по формуле:
 (4.6.6)
(4.6.6)
Где  – сила начального сжатия контактных пружин(приведённое значение);
– сила начального сжатия контактных пружин(приведённое значение);
 – сила контактного нажатия;
– сила контактного нажатия;
 –количество главных контактов (число полюсов);
–количество главных контактов (число полюсов);
AилиB – A – применённая типовая конструктивная схема электромагнитно-пружинного механизма контроллера.
Следует учесть, что все последующие расчётные значения сил  и
и  автоматически приведены к рабочему зазору d электромагнита.
автоматически приведены к рабочему зазору d электромагнита.





