Способом устного контроля, без выполнения каких-либо расчетов, является использование вспомогательного круга, помещенного над экраном РЛС или электронных средств нанесения линий, параллельных линии курса. Этот прием получил название «метод параллельных индексов» (РI). Он предназначен для визуального контроля над перемещением судна, относительно неподвижных ориентиров, при наблюдении за обстановкой на экране РЛС.
Его суть основана на свойстве неподвижных объектов, в режиме относительного движения, смещаться параллельно линии курса судна в противоположном направлении.
При использовании вспомогательного круга на нем наносятся линия через его центр и параллельные ей, на расстоянии равном ширине неподвижного круга дальности (см. рис.39, а).

Рис.39. Параллельные индексы и подготовка к плаванию
а) механический; б) нанесение пути при подготовке к плаванию;
в) электронный параллельный индекс.
Подбирают шкалу дальности так, чтобы приметный ориентир или буй попал на одну из линий. Если необходимо пройти на заданном расстоянии, то визуально следят за тем, чтобы ориентир перемещался по параллельному индексу. Если происходит его смещение относительно заданной линии, то необходимо корректировать движение судна, с таким расчетом, чтобы парировать происходящий снос.
Для того, чтобы использовать метод визуального контроля положения судна, необходимо выполнить предварительную подготовку карты, путем нанесения соответствующих линий параллельных индексов (рис.39, б).
При использовании электронного параллельного индекса наводят подвижный круг дальности и перекрестье визира на неподвижный приметный ориентир (см. рис. 39, с) и нажимают кнопку «РI». В результате на экране появляется штриховая линия. Ее длину и расположение можно регулировать, с таким расчетом, чтобы на экране вычертить параллельные индексы необходимой конфигурации.
Большим достоинством техники параллельных индексов является тот факт, что нет необходимости определять пеленги и расстояния для нахождения места судна относительно опасности. Однако при этом необходимо вести непрерывное и тщательное наблюдение за экраном РЛС, для того, чтобы своевременно обнаружить смещение приметного ориентира относительно проведенной линии.
144. Какой длины (в минутах) удобно использовать вектора при решении задач на маневренном планшете?
Векторы скоростей рекомендуется назначать равными 6 или 12 минутам.
145. Дайте описание алгоритма метода решения задач на расхождение с опасной (ными) целью (ями) на маневренном планшете.
Анализ обстановки с применением маневренного планшета производится следующим образом (рис. 18.1):
— место своего корабля К считают в центре планшета;
— по пеленгам и дистанциям, измеренным радиолокатором через 1—2 мин, наносят на планшет не менее двух мест цели;
— через полученные точки М1, М2, М3 проводят линию относительного движения ЛОД1;
— из центра планшета на ЛОД1 опускают перпендикуляр КС1, длина которого является кратчайшим расстоянием расхождения с целью DKV.
Если DKp > Dоз, угрозы чрезмерного (опасного) сближения нет. Дальнейших расчетов и маневров не потребуется до тех пор, пока цель не изменит курс или скорость.
Если DKp < Dоз, производится определение ЭДЦ:
— из точки К откладывают вектор скорости своего корабля VK;
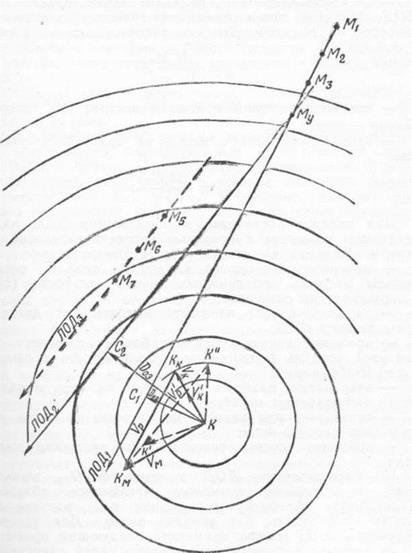
Рис. 18.1. Анализ обстановки, определение ЭДЦ и расчет маневра расхождения с одиночной целью на маневренном планшете
— из конца вектора VK проводят линию, параллельную ЛОД1 На этой линии откладывают вектор относительной скорости Vр величину которого рассчитывают по формуле

— соединив точку К с концом вектора Vр получают вектор скорости VM;
— время сближения с целью на кратчайшее расстояние
Для анализа обстановки и определения ЭДЦ на маневренном планшете с помощью картосчислительной приставки «Пальма» выполняют следующие действия:
— маневренный планшет кладут на стол и согласовывают масштаб неподвижных кругов дальности (НКД) с окружностями планшета;
— на окружностях планшета надписывают дистанции и выключают НКД;
— проводят линию курса корабля на планшете (считая свой корабль в центре) и совмещают его с отметкой курса изображения;
— закрепляют планшет и наносят на него начальные места наблюдаемых целей;
— через 1—2 мин наносят на планшет не менее двух-трех мест каждой цели;
— проводят линии относительного движения каждой цели.
По расположению ЛОД и величине DKp выявляют цели, с которыми возможно чрезмерное сближение. Дальнейшую обработку информации для расчета ЭДЦ можно производить, как указано выше. Для ускорения получения ЭДЦ молено применять следующий прием:
— планшет с нанесенными местами целей сдвигают назад по курсу на величину пройденного кораблем за время наблюдений расстояния;
— наносят новые отметки целей, сдвигая каждый раз планшет назад по курсу на величину пройденного расстояния;
— соединив прямой места целей, получают направление вектора истинной скорости каждой из них, направленной от предыдущих точек к последующим;
— величину векторов истинной скорости рассчитывают, как обычно, через пройденное расстояние и время наблюдений.






